近圆轨道下航天器相对运动的滑模控制
2017-05-09柴鑫彤杨学博
柴鑫彤,杨学博
(渤海大学 信息科学与技术学院,辽宁 锦州 121013)
近圆轨道下航天器相对运动的滑模控制
柴鑫彤,杨学博
(渤海大学 信息科学与技术学院,辽宁 锦州 121013)
文中确定了一个切换函数和控制律,设计了一个针对近圆轨道无扰动理想状态下航天器相对运动的滑模控制器,使实际状态与期望状态偏差达到或接近于0。切换函数和控制律的稳定性的证明利用了Lyapunov函数。最后通过Matlab仿真实验验证了该滑模控制器的有效性。
滑模控制;相对运动;航天器;空间交会
随着第一套航天纪念钞的发行,航天领域以及航天技术的发展已经具有越来越重要的意义。中国的航天活动也愈来愈频繁。在国家即将发射长征七号、天宫二号、神州十一号和将要实施嫦娥五号计划,以及中国空间站即将投入使用的大背景下,航天器相对运动问题的研究更具有时代意义。
滑模控制出现于上个世纪60年代,经过世界各国各个年代领域新秀、资深专家学者的研究,目前各个分支领域已经在两个世纪的研究中逐渐相对独立,并且这种设计方法已经被各自领域人士重视及应用[1-7]。滑模控制方法本身,可以根据自需选取适当的滑模切换面[8]和控制律[9-10],能够快速对输入的变换进行响应是自身的一大优势,且具有很好的鲁棒性。所以,用滑模控制方法研究航天器相对运动问题意义重大。文中在此趋势下,合理地设计了近圆轨道情形理想状态下的航天器相对运动滑模控制器,在两航天器的完全交会背景下,验证了控制器系统是可行有效的。
1 航天器相对运动模型
设目标航天器的质心A为坐标原点,x轴由地心指向目标航天器质心;y轴在轨道平面内,且指向运动方向为正;z轴沿轨道平面正法线方向;y轴、z轴构成右手定则[11]。航天器和航天器D相对运动的坐标系如图1所示。
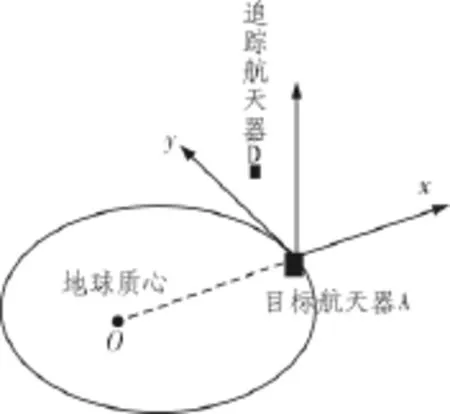
图1 航天器相对运动坐标系
令ρ表示追踪航天器D相对于目标航天器A的位置矢量,即:

式中,ra表示目标航天器相对地球的位置矢量,rd表示追踪航天器相对地球的位置矢量。
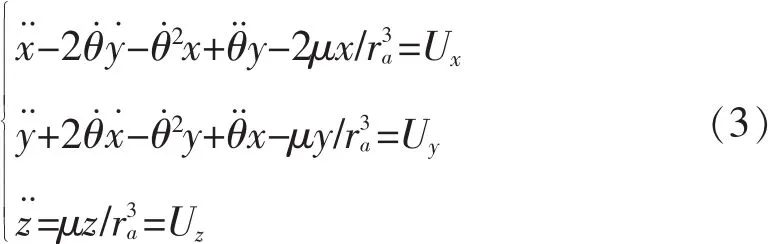
假设航天器A与目标航天器D的距离远小于航天器与地心间的距离,对式(1)以地心为坐标原点的坐标系进行二次求导,得相对运动矢量方程为[12-13]:

式中,ra=|ra|和rd=|rd|分别表示目标和追踪航天器的地心距;t为时间;μ为地球引力常数;u表示作用在踪航天器D上推力产生的加速度。在图1坐标系下:

式中,x、y、z是追踪航天器相对目标航天器的位置坐标。
2 近圆轨道下航天器相对运动的滑模控制器设计

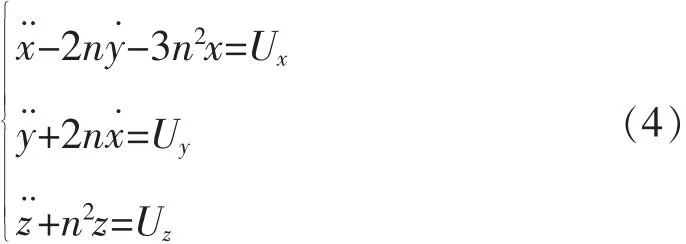
其中
那么,动力学方程(4)则化成:

为了对下文滑模控制器的有效性的验证,设计相对状态由ρ*来表示,实时偏差用e表示,那么e= ρ-ρ*,则所以:

2.1 确定切换函数
将切换函数设计成如下形式:

式中:ζ是3×3的正定对称常值矩阵。

现在需要验证上述切换面的的稳定性,所以定义如下Lyapunov函数:

对式(10)求导,可得

根据李雅普诺夫稳定性定理[9],滑动模态渐近稳定。
2.2 控制律推导
在解决了滑模控制系统的滑动模态后,工作重点将转移到控制律设计部分,利用滑动模态可达条件设计滑模变结构控制。选取指数趋近律保证到达条件:

式中,λ、k是三阶正定对角阵。
将式(7)、式(8)、式(9)、式(12)联立,化简可得

现在需要验证上述控制律的稳定性,所以定义如下Lyapunov函数:

对式(14)求导,可得
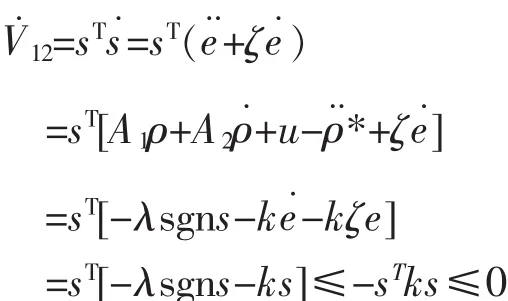
根据李雅普诺夫函数稳定性定理,所设计的滑模控制器式(13),可以保证滑模控制系统全局渐进稳定。
即式(13)就是文中所设计的近圆轨道无扰动情形下航天器相对运动的滑模控制器。
3 仿真算例
考虑目标航天器运行轨道半径为700 km,追踪航天器D已经运行至目标航天器附近保持相对静止,与目标航天器的初始相对距离为[-800 m,300 m,-400 m],任务目标为:实现两航天器的完全交会,即期望相对距离为[0 m,0 m,0 m]。此外,我们选取下列相应的控制参数:
在上述初始情况及控制参数作用下,应用式(13)中的控制算法对追踪航天器进行控制驱动,航天器相对距离的变化如图2所示。
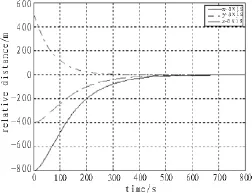
图2 三轴相对距离

图3 追踪航天器三轴控制输入加速度
可见,两航天器在三轴的相对距离均收敛为0,能够在大约600秒时实现最终的交会。在相对运动过程中,施加在追踪航天器三轴上的加速度如图3所示。
从图3可见,y轴所需的控制加速度比较大,x轴和z轴所需控制加速度比较小。为了体现滑模控制的特点,图4和图5给出了滑模切换函数和其符号函数的变化曲线。可见,当相对距离收敛至0左右时,符号函数开始起作用,通过频繁调整保证相对距离保持为0。当然,对于实际交会任务来说,航天器交会往往会通过对接等形式连成一个整体,追踪航天器也不再需要后续的控制推力作用。仿真曲线仅充分展示出了滑模控制的特性。
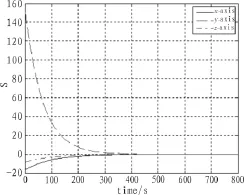
图4 滑模切换函数S变化曲线
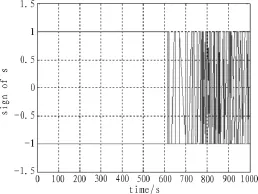
图5 符号函数变化曲线
通过以上仿真可见,提出的滑模控制算法有效实现了追踪航天器与目标航天器的交会。值得指出的是,所提出的控制算法可以通过改变参数实现不同任务需求。比如在上面的仿真中,可以发现控制输入加速度较大。如果追踪航天器功率较小,控制输入无法提供较大的推力,那么可通过减小参数来实现。如选取k为diag[0.004,0.006,0.004],则三轴相对距离变化曲线和控制输入加速度曲线分别如图6和图7所示。
通过将图2、3与图6、7相对比可见,采用新参数k情况下,追踪航天器需要较小的控制输入,但所需的交会时间相应延长。这种情况适用于载人航天器或小型航天器等合作航天器之间实现自主交会。相反,如要求以尽可能短的时间实现交会,比如非合作航天器间的拦截任务,则可在最大推力允许范围内增大参数k,以此缩短交会时间。可见,控制参数便于根据实际需要进行调节也是所提出控制算法的一项优点。
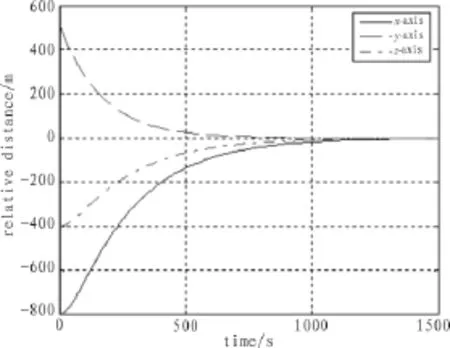
图6 三轴相对距离(新参数k)
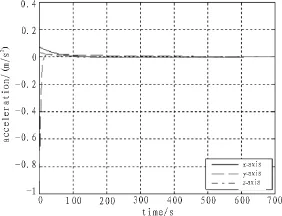
图7 追踪航天器三轴输入控制加速度(新参数k)
4 结 论
合理地设计出的近圆轨道情形理想状态下的航天器相对运动滑模控制器,在两航天器的完全交会下,验证了控制器系统是可行有效的。
[1]Huber O,Acary V,Brogliato B.Lyapunov stability and performance analysis of the implicit discrete sliding mode control[J].IEEE Transactions on Automatic Control,2016.
[2]Serna-Garcés,Sergio Ignacio,Gonzalez Montoya, et al.Sliding-mode control of a charger/discharger DC/DC converter for DC-Bus regulation in renewable power syst-ems[J].Energies,2016,9.
[3]Bartolini G,Levant A,Pisano A,et al.Adaptive second-order sliding mode control with uncertainty compensation[J].International Journal of Control,2016:1-19.
[4]Eom M,Chwa D.Adaptive integral sliding mode control for nuclear research reactor with system uncertainties and input perturbation[J].Electronics Letters,2016,52(4):272-274.
[5]Elmokadem T,Zribi M,Youcef-Toumi K.Trajectory tracking sliding mode control of underactuated AUVs[J].Nonlinear Dynamics,2016,84(2): 1079-1091.
[6]Incremona G P,Cucuzzella M,Ferrara A.Adaptive suboptimal second order sliding mode control for microgrids[J].International Journal of Control,2016:1-37.
[7]高会军,杨学博,王常虹.一种有限推力航天器交会轨道的鲁棒设计方法[J].空间控制技术与应用,2009,35(2):3-6+23.
[8]李敏丽.基于滑模变结构的航天器姿态控制方法研究[D].哈尔滨:哈尔滨工业大学,2009.
[9]高为炳.变结构控制的理论及设计方法[M].北京:科技出版社,1998.
[10]齐亮.基于滑模变结构方法的永磁同步电机控制问题研究及应用[D].上海:华东理工大学,2013.
[11]刘鲁华,孟云鹤,安雪滢.航天器相对运动轨道动力学与控制[M].北京:中国宇航出版社,2013.
[12]杨乐平,朱彦伟,黄涣.航天器相对运动轨迹规划与控制[M].北京:国防工业出版社,2010.
[13]高翔宇.航天器轨道交会鲁棒和最优控制设计[D].哈尔滨:哈尔滨工业大学,2014.
[14]Lawden D F.Optimaltrajectoriesforspace navigation[M].London:Butterworths,1963.
[15]Clohessy W H,Wiltshire R S.Terminal guidance system for satellite rendezvous[J].Journal of the Aerospace Science,1960,27(9):653-658.
The sliding mode control for spacecraft relative motion on circular orbit
CHAI Xin-tong,YANG Xue-bo
(The College of Information Science and Technology,Bohai University,Jinzhou 121013,China)
This paper determines a switching function and a control law,and according to the relative motion dynamics between spacecrafts in a near-circular orbit without disturbance,a sliding mode controller is designed to drive the deviation of the actual and expected state to reach or close to zero. Besides,the stability of the switching function and the control law is proved by using the Lyapunov function.Finally,the effectiveness of the sliding mode controller is verified by Matlab simulation.
sliding mode control;relative motion;spacecraft;space rendezvous
TN01
:A
:1674-6236(2017)01-0093-04
2016-04-22稿件编号:201604221
国家自然科学基金(61203122);辽宁省自然科学基金(2013020023)
柴鑫彤(1990—),女,辽宁阜新人,硕士研究生。研究方向:航天器控制。