基于机器学习的网络稳定控制器设计与实现
2017-05-09张铁头谭营军李翠霞
张铁头+谭营军+李翠霞

摘 要: 由于网络数据多元化以及网络非法入侵的干扰,当前设计出的网络稳定控制器往往响应时间过长,提出基于机器学习的网络稳定控制器设计方法。设计的控制器主要由开发板、控制电路和机器学习模块组成。机器学习模块利用特定的学习方式对网络被控对象进行监督,监督结果将被传送到控制电路进行多种学习行为的虛拟控制。开发板对虚拟控制结果进行接收,筛选出对网络被控对象的最优控制策略。机器学习模块对最优控制策略进行评价后,向网络被控对象实施稳定控制。实验结论证明,所设计的控制器可在维持对网络有效控制的同时,获取优异响应时间,响应能力较强,可较好地对设计目标进行实现。
关键词: 机器学习; 网络稳定控制器; 设计方法; 虚拟控制
中图分类号: TN711?34; TP273.1 文献标识码: A 文章编号: 1004?373X(2017)08?0053?04
Design and implementation of network stable controller based on machine learning
ZHANG Tietou 1, TAN Yingjun1, LI Cuixia2
(1. Department of Information Engineering, Henan Polytechnic, Zhengzhou 450046, China;
2. School of Software and Applied Technology, Zhengzhou University, Zhengzhou 450002, China)
Abstract: Because of interference of network illegal invasion and network data diversification, and the too long response time of the currently?designed network stability controller, a design method of network stable controller based on machine learning is put forward. The controller is mainly composed of development board, control circuit and machine learning module. Machine learning module using the specific learning way supervises the network controlled object. The supervision results are transmitted to the control circuit for virtual control of a variety of learning behaviors. The development board receives the virtual control results, and screens out an optimal control strategy of the network controlled object. The machine learning module carries out stable control to the network controlled object after evaluation for the optimal control strategy. The experimental conclusions show that the controller can obtain the excellent response time while maintaining effective control to the network, has strong response ability, and can achieve the design goal well.
Keywords: machine learning; network stability controller; design method; virtual control
0 引 言
机器学习是一项交织了统计概率学、凹凸检验、逼近理论等技术的人工智能项目,现被极其广泛地应用在分析与控制工作中,是人工智能的核心。网络是当今社会最为重要的信息传递媒介,也是辅助各行各业进行设计、分析、识别等工作的工具[1?3]。网络的稳定是实现上述工作的基础保障,将机器学习应用于网络稳定控制器的设计中,通过实践学习方式在维持稳定控制器对网络有效控制的同时,降低控制器的响应时间,这也是科研组织当前研究的新型科研项目[4?6]。
1 基于机器学习的网络稳定控制器设计
1.1 控制器整体设计
基于机器学习的网络稳定控制器主要由开发板、控制电路和机器学习模块组成,还包括各种功能模块,如传感器模块、计算机控制模块、存储模块和传输模块。其中,开发板、控制电路是控制器的硬件端,机器学习模块是控制器的实现端。
整个控制器以实现端为核心,融合硬件端进行辅助控制,实现缩减控制器响应时间的设计目标。图1为控制器整体设计图。
由图1可知,机器学习模块直接与网络被控对象相接触,利用特定的学习方式对网络被控对象进行监督,传感器模块的作用是感应网络被控对象的各项参数,并将有用参数进行模/数转换,以供机器学习模块使用。
1.2 控制电路设计
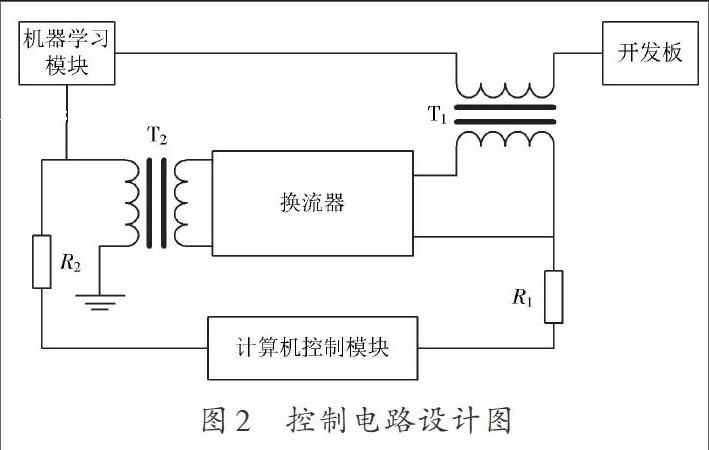
基于机器学习的网络稳定控制器的控制电路是一个自适应线性电路,能够较为有效地避免控制器产生低频率的震荡效应,对控制器响应时间缩减的目标有着过渡作用,其电路设计如图2所示。
由图2可知,换流器的作用是对机器学习模块监督结果的电压进行直流与交流的转换,T1,T2代表换流器的外接变压器,控制电路的输出值与感应网络被控对象的电压参数存在一定的线性关系。计算机控制模块、开发板和机器学习模块与控制电路的连接方式均为直接相连,这表示,基于机器学习的网络稳定控制器的控制电路,在本质上其实是一个被赋予了控制能力的串口通信电路。
1.3 开发板设计
基于机器学习的网络稳定控制器选择的开发板是具有四层结构的Mini2440开发板,其拥有能耗低、实用性强、价格便宜等优点,是一款我国国内性价比最高的开发板。Mini2440開发板的设计结构采用了高性能的哈佛结构,并内置了三星S3C2440微处理器。其布线方式采用等长布线,有效地保证了控制器的信号接收能力,可在一定程度上缩减控制器的响应时间。Mini2440开发板的结构图如图3所示。
由图3可知,Mini2440开发板主要由液晶显示屏、网口、JTAG接口和总线扩展器组成,其工作电压分为两种,分别是1.8 V和3.3 V。微处理器的电平类型是TTL的,考虑到有可能出现RS 232类型的电平,故在需要时应从串口处连接电平支持芯片。
2 基于机器学习的网络稳定控制器软件设计
2.1 机器学习模块流程设计
在所设计的基于机器学习的网络稳定控制器中,所需解决的重点设计内容是:通过对网络数据进行的有效解析,实现数据特性的深度挖掘,使控制器拥有自主学习能力,用于平衡网络稳定,获取控制器优异的响应时间。在机器学习模块中,机器学习方式有三种,分别是督促、无督促和半督促,其学习流程如图4~图6所示。
由图4~图6可知,机器学习的督促方式是针对网络被控对象数据中的特性数据进行数据集合模型训练和重构的过程。重构是指对网络被控对象进行监督,其监督工作经由重构器实现。重构结果是通过对比网络被控对象标准特性与实际特性得出的模型微调数据。通常,数据集合模型训练的次数越多,所获得的重构结果就越精确。
2.2 评价学习目标函数
评价学习是机器学习中非常重要的计算过程,其较为注重机器学习环境对重构结果的影响性,是对各类机器学习方式结果的优化。评价学习可以以具体的行动手段将重构结果调整到最优状态,缩减基于机器学习的网络稳定控制器的控制误差,进而缩短其响应时间。
假设机器学习的网络稳定控制器在时间下的控制误差为;代表误差因素,;代表单相控制误差;代表控制误差的时间序列,则有:
(1)
在评价学习过程中,由于不用考虑网络被控对象的历史特性参数,故只需对网络被控对象未来的状态和行为进行估计。设表示网络被控对象数据中的状态特性,是行为特性,是单相控制误差评价函数,是状态特性调整函数。若被控网络对象始终处于稳定的网络状态下,则其评价学习目标函数可表示为:
(2)
若被控网络对象所处网络状态经常发生变化,应先对被控网络对象相邻时间段的重构结果做差,再用差值对评价学习目标函数进行更新,更新后的评价学习目标函数用表示,则有:
(3)
式中,是网络波动状态下的学习因子,其值始终大于1。
3 实验分析
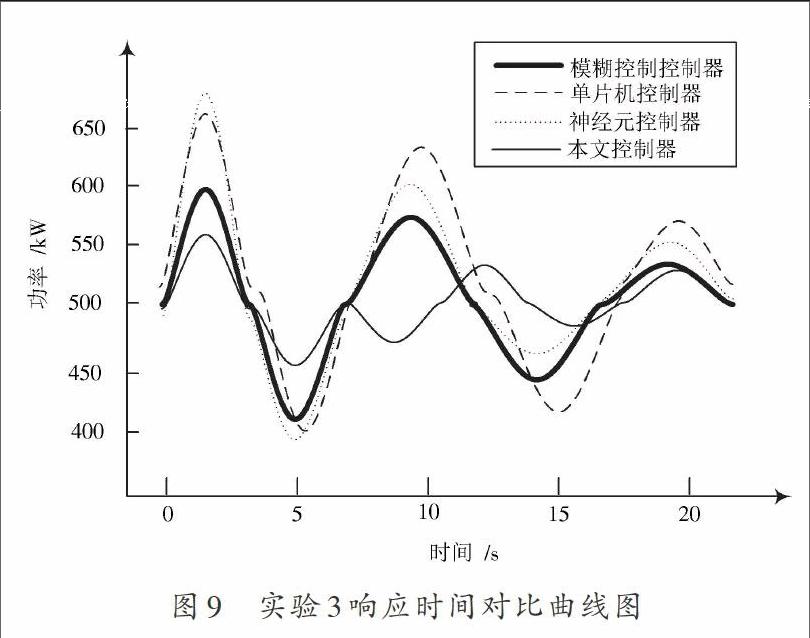
通过实验对本文所设计的基于机器学习的网络稳定控制器的响应时间进行分析。选取的与本文控制器进行实验对比的对象有3个,分别是基于神经元的网络稳定控制器、基于模糊控制的网络稳定控制器和基于单片机的网络稳定控制器。实验先将4个控制器的控制水平调节至同一水准,即给予4个控制器相同的控制时间和控制结果,在改变控制器传输功率的情况下进行三组实验,并对4个控制器的响应时间进行统计。表1是控制器传输功率的实验限定值,图7~图9是三个实验中,4个控制器响应时间对比曲线图。
表1 控制器传输功率实验限定值
由图7~图9可知,控制器传输功率的绝对值越低,其传输功率波动就越小,响应时间曲线稳定的就越快,控制器的响应时间便相应减少。对于基于模糊控制的网络稳定控制器来说,其响应时间曲线在4个控制器中稳定的最慢,证明此控制器对网络的响应能力较弱,无法维持网络稳定。
对于基于神经元的网络稳定控制器来说,其响应时间要低于基于模糊控制的网络稳定控制器,但其响应时间曲线的波动也最为明显,证明其响应能力远低于基于单片机的网络稳定控制器和本文控制器,无法获取优异的响应时间。基于单片机的网络稳定控制器的响应时间较短,且响应时间曲线波动比较平稳,但在实验3中500 kW的高功率下,其响应能力要远低于较低功率下的响应能力,证明此控制器的响应时间并不稳定。本文控制器在三组实验下的响应时间曲线均非常平稳,且响应时间曲线稳定得最快,证明本文控制器能够在维持对网络有效控制的同时,获取优异的响应时间,响应能力较强。
4 结 论
本文提出基于机器学习设计网络稳定控制器的设计方法。所设计的控制器主要由开发板、控制电路和机器学习模块组成。机器学习模块利用特定的学习方式对网络被控对象进行监督,监督结果将被传送到控制电路进行多种学习行为的虚拟控制。开发板对虚拟控制结果进行接收,筛选出对网络被控对象的最优控制策略。机器学习模块对最优控制策略进行评价后,向网络被控对象实施稳定控制。系统给出机器学习模块的工作流程,对最优控制策略的评价由基于机器学习的评价学习目标函数实现。实验结论证明,所设计的控制器在维持对网络有效控制的同时,获取优异的响应时间,响应能力较强,可较好地对设计目标进行实现。
参考文献
[1] 杨明极,祝庆峰,李硕.基于STM32的嵌入式网络控制器设计[J].测控技术,2014,33(10):93?96.
[2] 张鹏,宫占霞.网络控制系统H∞指数稳定容错控制器的设计[J].计算机测量与控制,2016,24(2):88?90.
[3] 朱其新,卢开红,朱永红,等.具有马尔科夫分布时延网络控制系统的保性能控制器设计[J].航天控制,2014,32(4):3?7.
[4] 王建华.具有伯努利分布丢包网络控制系统的保性能控制器设计[J].航天控制,2015,33(1):10?14.
[5] 毛为民.复杂电力网络的鲁棒性控制研究[J].计算机工程,2014,40(4):291?294.
[6] 张亚明,高晓丁.基于PID控制技术的供水网控制系统设计[J].西安工程大学学报,2015,29(5):578?582.
[7] 张伟,乔俊飞,李凡军.溶解氧浓度的直接自适应动态神经网络控制方法[J].控制理论与应用,2015,32(1):115?121.
[8] 宋清昆,李东威.二级倒立摆控制器设计及稳定性研究[J].计算机仿真,2015,32(4):305?309.
[9] 王涌,张燕燕.具有时延和丢包的网络控制系统稳定性分析[J].计算机工程,2015,41(10):111?116.
[10] 王影.基于自适应神经网络的AUVs路径跟踪控制[J].测控技术,2015,34(4):89?90.
[11] 龚伟志,徐建宏,刘增良.大数据环境下网络稳定性测试模型研究[J].现代电子技术,2015,38(6):1?3.
