液氧/煤油发动机用步进电机力矩加载系统设计
2017-05-09赵华,常莹
赵 华,常 莹
(西安航天计量测试研究所,陕西西安710100)
液氧/煤油发动机用步进电机力矩加载系统设计
赵 华,常 莹
(西安航天计量测试研究所,陕西西安710100)
介绍了液氧/煤油发动机用步进电机力矩加载系统的设计,描述了以磁粉制动器为加载核心的电机力矩加载系统的结构和硬件、软件设计方案,重点描述了力矩加载系统的模糊PI控制算法,将PI控制参数进行了模糊化和解模糊处理,制定了模糊推理规则,实现了力矩加载系统PI控制参数的动态调整,提高了步进电机力矩加载系统的加载精度。实际应用证明:研发的电机力矩加载系统实现了对液氧/煤油发动机用电机的模拟加载和电机参数的测量,满足了电机的测试要求。
液氧/煤油发动机;步进电机;力矩加载系统;磁粉制动器
0 引言
液氧/煤油发动机作为新一代重型运载火箭的动力装置,采用流量调节器和燃料节流阀来进行推力调节和混合比调节。流量调节器及燃料节流阀的工况调节是由步进电机控制来实现的[1]。为了保证发动机系统工作的可靠性及调节的有效性,需要对液氧/煤油发动机用步进电机在投入使用前进行发动机模拟工况下的地面测试,利用力矩加载装置对步进电机进行模拟加载并准确测试电机的性能指标,这对于火箭的控制精度及准确性十分重要,是保证火箭控制精度和性能的必要前提。
力矩加载装置实现的主要方式是电动伺服加载磁和粉制动器加载等。电动伺服加载采用直流电机或交流电机作为加载核心,具有响应速度快、运行平稳、动静态性能优良等优点,并且可进行反拖加载,具备静态力矩加载能力,主要用于高转速、大功率场合,在低速小力矩工作情况下加载精度较差;磁粉制动器具有实时可控性好、简单易行、可以连续加载以及大小功率可适应、在工作线性区内输出力矩平稳等优点;缺点是长时间未运行磁粉链断开会导致初始制动力矩不稳定。针对液氧/煤油发动机步进电机低转速低功率的实际工况,选用磁粉制动器作为加载核心。目前利用磁粉制动器进行加载的方法常用的有两种:手动控制法和PI调节器控制法[2]。现有的液氧/煤油发动机电机力矩加载装置采用手动调节控制输出,输出力矩允差为±5%F·S,使其模拟的力矩环境与实际有较大差距;而采用PI控制器的力矩加载装置虽然具有控制方便、结构简单等特点,但是鲁棒性较差,需要基于精确的数学模型,但是由于磁粉制动器具有磁滞非线性特性,使得其加载精度与动态响应存在很大的误差,而模糊PI控制算法不需要精确的数学模型便可实现PI参数的在线自适应调整[3],为此,本文设计的液氧/煤油发动机步进电机力矩加载系统通过磁粉均匀化处理,解决了长时间未运行磁粉链断裂、不均匀的问题,采用模糊PI控制算法,提高了步进电机力矩加载系统的加载精度。
1 力矩加载系统整体方案设计
液氧/煤油发动机用步进电机的力矩加载系统需要实现的功能包括:1)对被测步进电机进行制动力矩的加载,用于模拟发动机实际工况;2)实时测量被测步进电机的力矩、转速、转角、工作电流、工作电压等参数;3) 所有参数的自动采集、激励信号的自动施加以及数据的自动处理和实时保存等功能。图1为步进电机力矩加载系统的整体方案设计。
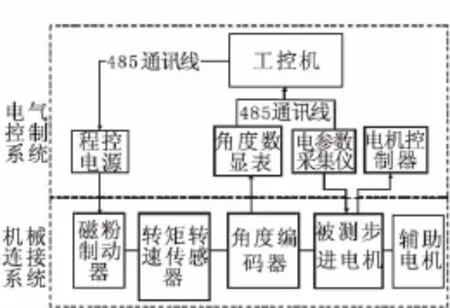
图1 步进电机力矩加载装置方案设计框图Fig.1 Block diagram for design scheme of stepping motor torque loading device
步进电机力矩加载装置主要由机械连接系统和电气控制系统两部分组成,机械连接部分主要完成磁粉制动器的均匀化处理和制动力矩的传输,电气控制系统主要完成制动力矩的输出控制和步进电机旋转角度、工作电参数的读取。
1.1 机械连接系统的设计
为实现磁粉制动器的磁粉性能稳定化、均匀化,获得较高精度的制动力矩,同时为了测试到步进电机低速转动过程中的转动角度,设计了一套可在测试前均匀磁粉的机械连接系统,其原理如图2所示:机械连接系统由磁粉制动器、转矩转速传感器、角度测量装置、辅助电机等组成,目前常用的角度测量装置包括角度电位器、旋转变压器、角度编码器等,角度电位器结构简单,测量范围广,但是分辨力有限,存在接触摩擦,动态响应差,液氧/煤油发动机步进电机的角度电位器分辨率仅为0.1°。旋转变压器抗震能力和温度特性极佳,因而其在恶劣环境的工作能力远胜于普通编码器,但是旋转变压器返回值是模拟量,精度略差,角度编码器体积小、频响高、分辨率高。考虑到力矩加载装置的使用环境和精度要求,角度测量装置选择了海德汉的角度编码器ERN180,其分辨率达到了13″。机械连接系统的连接方式为:磁粉制动器和转矩转速传感器安装在滑轨工作台上,角度编码器装配在被测步进电机延长轴上,并与辅助电机固定在回转平板上,回转平板可以在转动基座上旋转。力矩加载系统在使用前,首先转动滑轨工作台上的转动手柄,使滑轨工作台向回转平板反方向移动,断开转矩转速传感器与角度编码器的连接,回转平板与转动基座相对转动,当辅助电机一侧转动到转矩转速传感器输出端时,将锁紧手柄吊紧,使回转平板固定到转动基座上,利用联轴器将转矩转速传感器和辅助电机同轴连接,并通过程控电源输出励磁电流控制磁粉制动器输出制动力矩,当励磁电流与输出制动力矩基本呈线性关系时,认为磁粉制动器形成磁粉链,完成了磁粉制动器的均匀化处理。
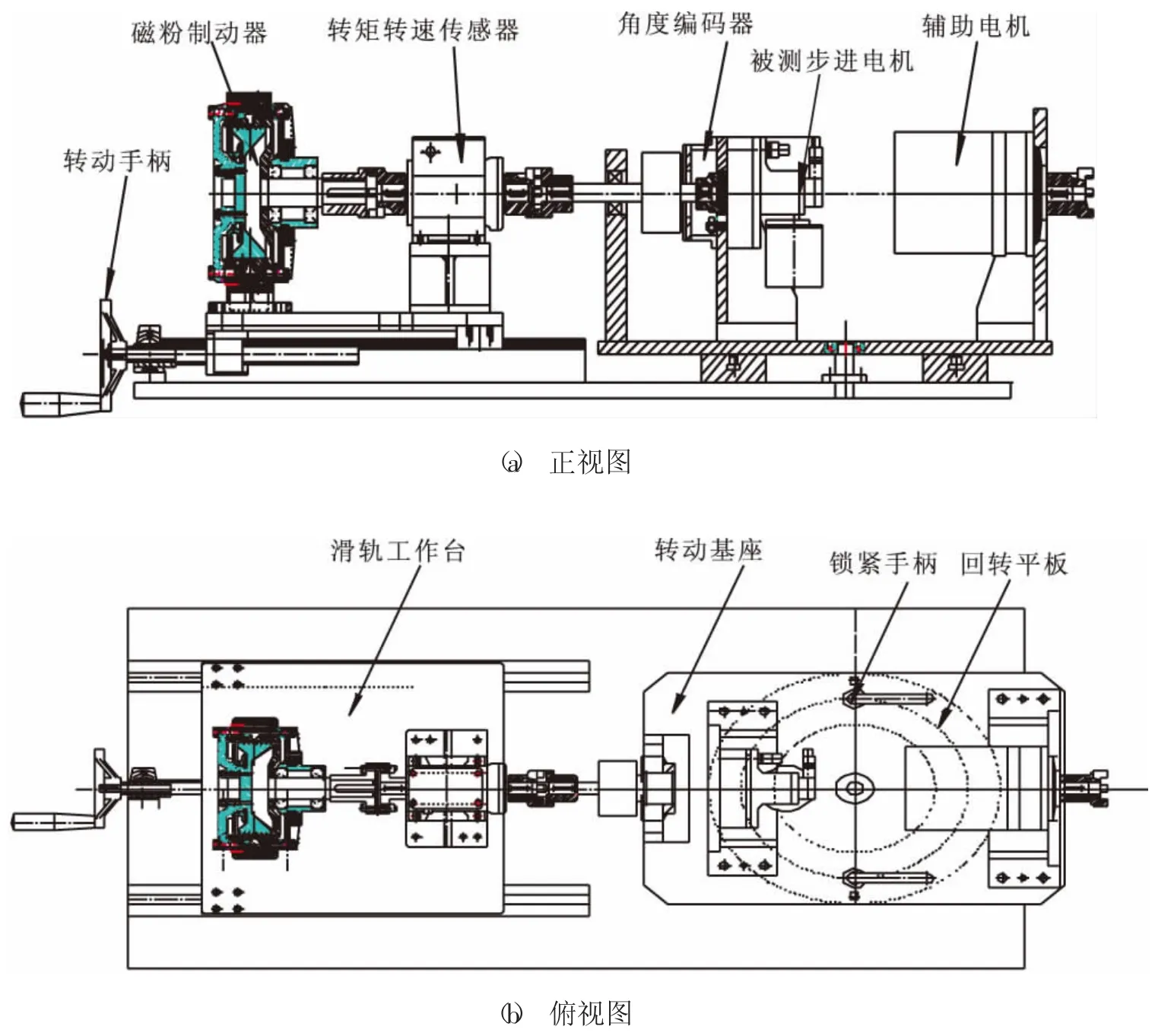
图2 机械连接系统设计示意图Fig.2 Schematic diagram for design of mechanical connection system
1.2 电气控制系统的设计
1.2.1 主控制器单元
电气控制系统的主控制器单元选择研华SYS-4U610型的PCI工控机,工控机利用485总线采集电参数采集仪和角度数显表读取的电机供电电压、电流值和电机旋转角度值,控制程控电源输出激励电流,调整磁粉制动器的制动力矩大小,通过工控机的PCI采集卡连接转矩转速传感器信号接口,将当前测量力矩值实时显示到屏幕上。
1.2.2 参数采集仪表及控制仪器
参数采集仪表包括电参数采集仪、角度数显表和转矩转速传感器,电参数采集仪选用兰陵机电的AMA-5,采用485总线方式与PCI工控机相连,在对步进电机加载制动力矩时,电参数采集仪实时采集电机的工作电压和工作电流,监测步进电机的工作状态是否正常。
角度数显表选用海德汉的ND287,与角度编码器ERN180配合使用,角度编码器测得步进电机的旋转角度后,角度数显表显示当前角度值并通过485总线将测量数据传输到PCI工控机上。
转矩转速传感器采集磁粉制动器的输出制动力矩,因为步进电机力矩加载精度要求高,所以转矩转速传感器选用兰陵机电的ZJ-50B,对实际应用,测量误差仅为±0.05%F·S,测量到的转矩值通过485总线送往PCI工控机。
控制仪表是程控电源,程控电源作为磁粉制动器的激励输出单元,通过输出不同的激励电流控制磁粉制动器输出不同的制动力矩,电流与输出力矩呈近似线性关系。
2 力矩加载系统软件设计
2.1 模糊PI算法程序
力矩加载系统软件由控制算法程序和上位机显示软件组成。控制算法程序采用模糊PI控制算法,实际力矩值与设定值的差值e和差值变化率ec作为模糊控制器的输入,将输入精确量进行模糊化处理后进行模糊推理,对模糊推理得到的模糊集合进行反模糊化处理得到输出参数ΔKp和ΔKi,将输出参数与上周期的Kp和Ki相加,实现了对PI参数的动态调整,PI控制器根据调整的PI参数调节程控电源的输出电流大小,从而改变磁粉制动器的输出力矩值,图3为模拟PI控制结构图[4]。
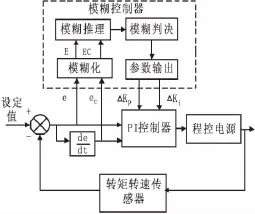
图3 模糊PI控制结构框图Fig.3 Diagram of fuzzy PI control structure
2.1.1 精确值模糊化
力矩加载系统为二输入二输出模糊控制器,需要对输入的精确值进行模糊化处理,力矩输出误差的e的基本论域为 [-5 N·m,5 N·m],E的模糊集合的量化等级为X={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},e的量化因子Ke见式(1)。

力矩输出误差变化率ec的基本论域为 [-5,5],EC的模糊集合量化等级为Y={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},ec的量化因子Kec见式(2)。

ΔKp和ΔKi的基本论域为 [-12,12],输出量Up和Ui的模糊集合量化等级均为 {-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},其量化因子Kpu和Kiu分别见式(3)和式(4)。
模糊化的目的是将精确的输入量转化成对应的模糊条件语句。在转换之前必须规定其输入输出语言变量的语言词,根据系统的输入量和输出量的量化等级范围,将输入、输出量统一选择为NB(负大)、NM (负中)、NS(负小)、ZO (零)、PS(正小)、PM (正中)、PB (正大)7个语言词,所以,语言变量论域上的模糊集合E,EC,Up,Ui为 {NB,NM,NS,ZO,PS,PM,PB}[5]。
模糊语言和量化因子确定后,利用式(5)完成量化计算:

式中:K为量化因子;ei为精确值,Ei为基本论域上的量化等级值。找出量化等级值最大隶属度对应的语言值所决定的模糊集合,该模糊集合代表了精确值ei的模糊化。
根据确定的模糊变量的语言词、模糊集合量化等级确定输入、输出变量的隶属度函数如图4所示,其中,所有模糊集合采用三角函数[6]。

图4 输入、输出变量隶属定义Fig.4 Membership definition of input and output variables
2.1.2 模糊推理规则设计
根据力矩加载控制的专家经验和PI控制器的数字规律,得到的控制规则可以用语言表述为:
1) 当力矩加载系统的力矩差值e较大时,应加快系统的响应速度,取较大的比例系数Kp,同时为了减少系统的超调,应选取较小的积分系数Ki。
2) 当力矩加载系统的力矩差值e较小时,为了防止系统的超调,需要减少比例系数Kp,同时,为了消除系统的稳态误差,应选用较大的积分系数Ki。
3)当力矩加载系统的力矩差值变化率ec较大时,力矩加载系统需要加快系统响应速度,增大比例系数Kp,并减少积分环节对系统的影响,选取较小的积分系数Ki,当力矩加载系统的力矩差值变化率ec较小时,取较小的比例系数Kp和较大的积分系数Ki。
4) 当力矩加载系统的力矩差值e和力矩差值变化率ec中等大小时,比例系数Kp和积分系数Ki取值需适中,保证系统的响应并提高系统的无差度。
5) 在调节过程中为了防止出现积分饱和现象,采用了抗积分饱和法,当控制进入积分饱和区后,不再进行积分累加,只执行削弱积分项的运行;
由以上力矩加载系统的一般控制规则和实验验证共总结出来49条模糊推理规则,模糊推理语句采用IF E isA and EC is B THEN U is C形式[7],表1和表2为力矩加载系统的模糊控制规则表。
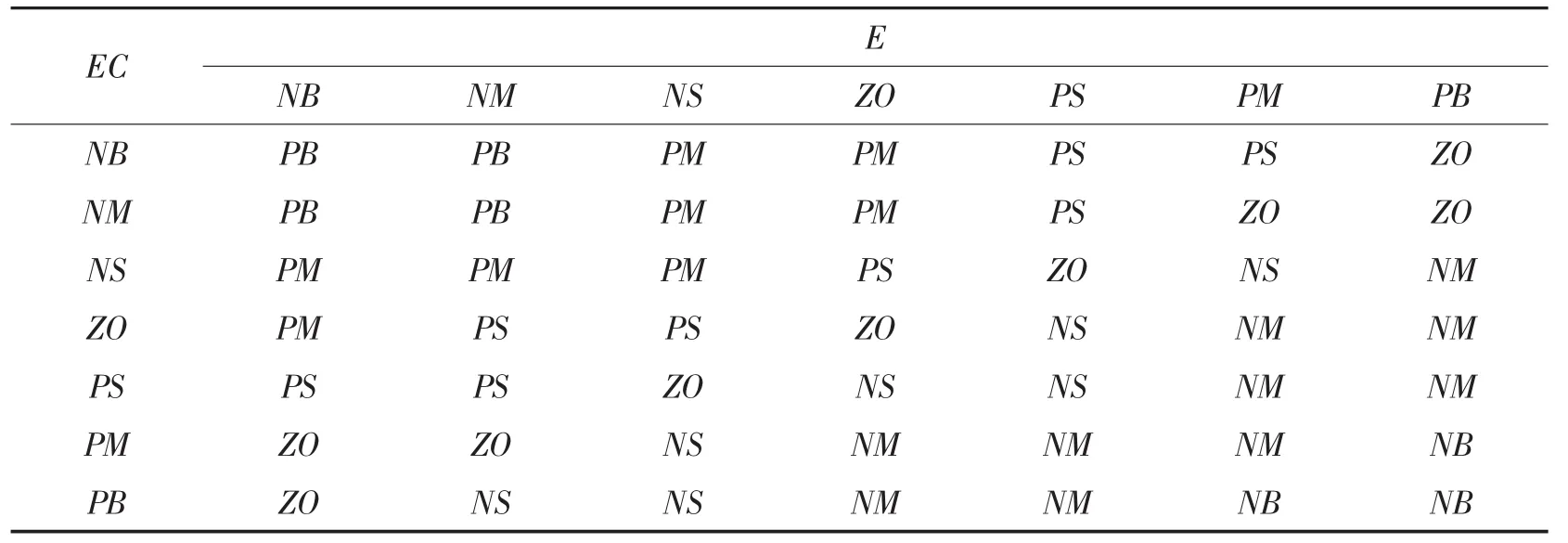
表1 力矩加载系统ΔKp模糊控制规则表Tab.1 ΔKpfuzzy control rule for torque loading system
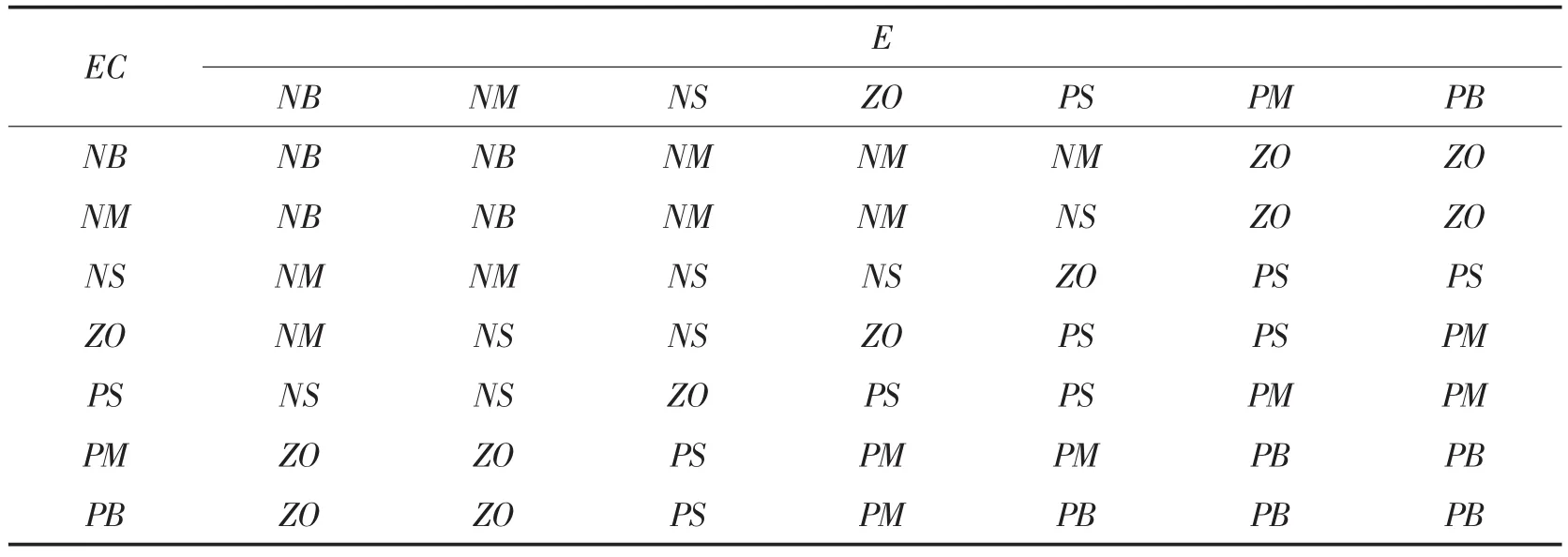
表2 力矩加载系统ΔKi模糊控制规则表Tab.2 ΔKifuzzy control rule for torque loading system
2.1.3 输出值模糊判决
对输出值进行模糊判决实际上是对通过模糊推理得到的模糊集合进行清晰化,得到精确的控制量,对输出模糊集合的解模糊判决方法采用加权平均法,利用论域中的每个元素xi(i=1,2,…,n),将它作为待判决输出模糊集合U的隶属度函数μU(xi)的加权系数,即取乘积xiμU(xi)(i= 1,2…,n),再计算该乘积和对于隶属度和的平均值xo[8],计算公式如式(6)所示。
式中:xi是模糊输出的一个语言变量;μU(xi)是xi对应的隶属度。
最后,由语言变量控制量变化ΔKp和ΔKi的赋值表查到论域元素xo的对应精确量,其精确量就是实际加到被控过程上的控制量变化,图5和图6为ΔKp和ΔKi的模糊控制查询图。
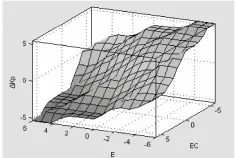
图5 ΔKp模糊控制查询表Fig.5 ΔKpstructure diagram of fuzzy control

图6 ΔKi模糊控制查询表Fig.6 ΔKistructure diagram of fuzzy control
利用图5和图6完成ΔKp和ΔKi的查询后,将查到的数据分别乘以输出量化因子Kpu和ΔKiu,便得到了最终的PI控制参数,完成了参数输出。其中,根据实际加载要求和传感器采集速率等因素,设定模糊PI控制周期为0.5 s。
2.2 上位机显示软件
上位机显示软件主要完成制动力矩值、电机旋转角度值、电机工作电压值、电流值等采集量值的显示、保存和打印等功能,图7为上位机显示软件结构图。

图7 上位机显示软件结构图Fig.7 Structure diagram of PC display software
仪器控制部分通过控制电机控制器完成对液氧煤油发动机步进电机转速、方向的控制,并控制程控电源改变力矩值,数据采集部分通过读取角度数显表、电参数采集仪、转矩转速传感器的回传值显示电机旋转角度值、电机工作电流值、电压值及输出力矩值等参数,数据管理部分实现测量数据的保存、查询、生成报表等功能。力矩加载系统软件操作过程为:首先通过软件设置初始的PI参数,并通过恒转矩选项输入目标力矩值,启动测量过程后,软件通过模糊PI算法调节程控电源激励电流值进而改变输出力矩值,同时,软件将当前采集的力矩值、电机工作电流值、电机转速、功率等数据实时显示,当测量过程结束后,系统将测量数据保存到SQL数据库,以便于以后的查询和报表生成[9]。
3 实验验证
3.1 力矩加载测试
液氧/煤油发动机步进电机正常工作时力矩加载范围为10 N·m~25 N·m,实验选取10 N·m,20 N·m和25 N·m 3个点作为力矩输出测试点,分别采用手动加载、传统PI控制加载、模糊PI控制加载三种方式,测试电机为XX-XXA型液氧/煤油发动机步进电机,图8为3个测试点的力矩-时间曲线图。
根据图8和测量数据可得到每个力矩测试点的三种控制方法允差计算表,计算表如表3所示。
通过上述分析可得,在对液氧煤油发动机步进电机加载范围内,采用模糊PI控制全量程输出允差最大为0.3%,较传统PI控制方式和手动控制方式输出稳定性大大提高,能精确的模拟步进电机组件的实际工况。
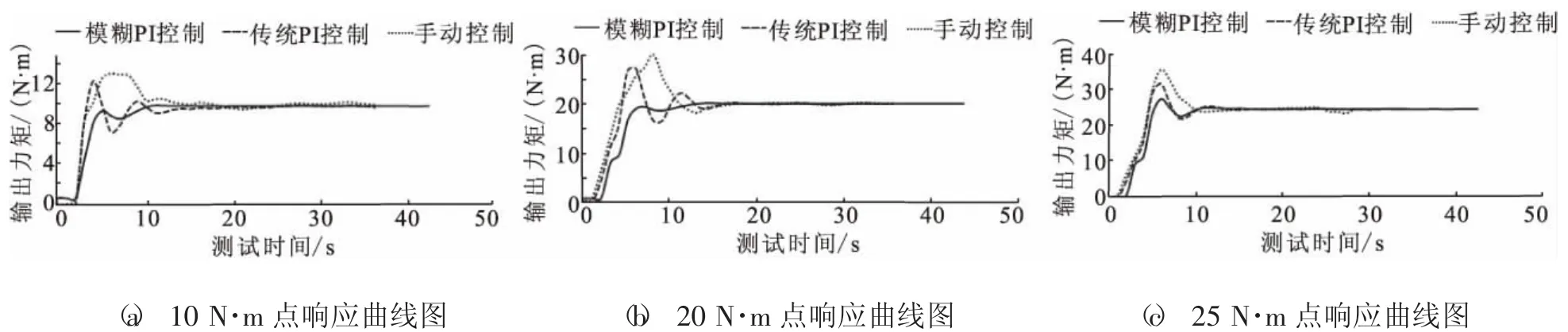
图8 恒力矩输出响应曲线Fig.8 Curves of constant torque output
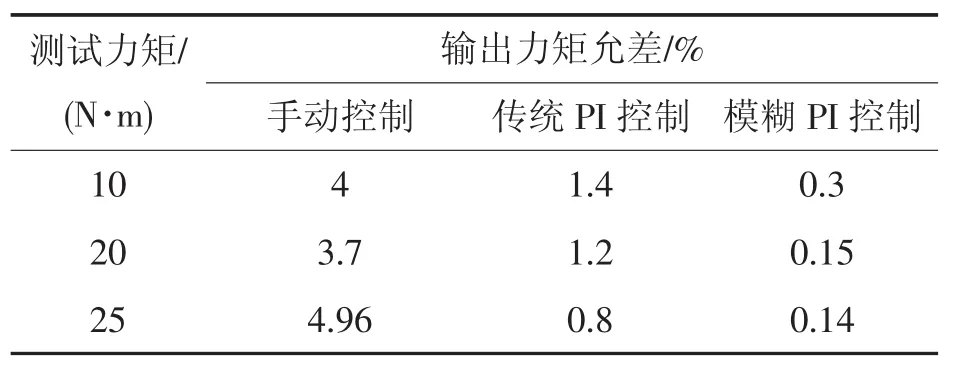
表3 不同力矩加载方式允差计算表Tab.3 Tolerance calculation of different torque loading modes
3.2 电机转动角度测试
采用电机控制器对步进电机发送驱动脉冲,步进电机接收到脉冲序列后转动相应的角度值,利用力矩加载装置的角度编码器读取步进电机的转动角度值,根据电机实际工况和测试要求,选取0.999°,30°,90°和180°4个角度值进行测量,测量得到的数据见表4。

表4 电机转动角度测量表Tab.4 Measured values of motor rotation angle
由上表数据计算可得,当设定值为0.999°,30°,90°和180°时,测量重复性分别为1×10-3,1×10-4,2.2×10-5和1.67×10-5,测量重复性较好,力矩加载系统能较好的完成对步进电机转动角度值的测量。
4 结束语
本文提出的液氧/煤油发动机用步进电机力矩加载系统通过回转平板和转动基座配合实现了加载前磁粉制动器的磁粉的均匀化,并结合模糊PI控制算法对输出制动力矩值实时的修正,使输出力矩值精度大大提高。经实验验证,步进电机力矩加载系统具有操作自动化、系统可靠性高等优点,输出制动力矩满足液氧/煤油发动机步进电机测试需求,只需增加电机接口匹配工装,力矩加载系统便可推广至其他步进电机、直流电机加载、控制器性能验证等场合,具有较高的经济效益。
[1]刘军.液氧煤油发动机用电机测量控制系统研究设计[D].西安:西北工业大学,2005.
[2]白连平,杨婷,孙佃升.电机实验中稳恒负载的实现[J].实验技术与管理,2016,(8):23-25.
[3]张洪帅,王平,韩邦成.基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J].中国电机工程学报,2014,34(12):1879-1894.
[4]章为国,杨向忠.模糊控制理论与应用[M].西安:西北工业大学出版社,2000.
[5]陈作杰,吴培德,张义红.模糊PI控制器在薄膜张力控制系统的应用研究[J].智能计算机与应用,2014,(6): 42-44.
[6]周晖.基于模糊PI控制的永磁同步电机矢量控制系统实现及性能研究[D].杭州:浙江大学,2006.
[7]邹乾.两相混合式步进电机的模糊PI控制方法研究[D].杭州:浙江大学,2010.
[8]李刚,韩海兰,赵德阳.四轮轮毂电机电动汽车横摆力矩模糊PI控制研究[J].机械设计与制造,2015,(7):103-107.
[9]鲁文其,周延锁,刘虎.动态载荷模拟可控加载与测试装置设计[J].机电工程,2015(2):185-189.
(编辑:陈红霞)
Design of stepper motor torque loading system for LOX/kerosene engine
ZHAO Hua,CHANG Ying
(Xi’an Aerospace Measurement and Test Research Institute,Xi’an 710100,China)
The design of the torque loading system of stepper motor for liquid oxygen and kerosene engine is introduced in this paper.The structure,hardware and software design of the motor torque loading system taking magnetic powder brake as the loading core are described.The fuzzy PI control algorithm of the torque loading system is elaborated.The fuzzification and de-blurred processing of the PI control parameters are performed.The fuzzy inference rule is drawn up.The dynamical adjustment ofPIcontrol parameters for the torque loadingsystem was achieved.The loading accuracy of the stepping motor torque loading system was improved.The practical application proves that the developed motor torque loading system can realize the simulation loading and parameter measurement of the motor used in LOX/kerosene engine and meet the testing requirements of the motor.
LOX/kerosene engine;stepper motor;torque loading system;magnetic powder brake
V434-34
A
1672-9374(2017)01-0059-07
2016-10-08;
2016-11-02
赵华(1987—),男,硕士,工程师,研究领域为液体火箭发动机计量测试技术
