Directional Routing Algorithm for Deep Space Optical Network
2017-05-08LeiGuoXiaoruiWangYejunLiuPengchaoHanYaminXieYuchenTan
Lei Guo , Xiaorui Wang, Yejun Liu* , Pengchao Han, Yamin Xie, Yuchen Tan
1 Key Laboratory of Medical Image Computing of Northeastern University, Ministry of Education
2 School of Computer Science and Engineering, Northeastern University, Shenyang, 110819, China
3 School of Computer and Communication Engineering, Zhengzhou University of Light Industry, Zhengzhou, 450002, China
4 State Key Laboratory of Information Photonics and Optical Communications (BUPT), 100876, China
* The corresponding author, email: liuyejun09@gmail.com
I.INTRODUCTION
With the rapid growth of world-wide demand in deep space scientific missions, such as Lunar, Mars and other Planetary exploration and so on, there has been increasing collection of scientific data generated from deep space exploration missions and transmitted back to Earth [1].Moreover, with the development of science, economy and society, the needs for research and exploration of deep space have entered a rapid and stable development stage[2].The pressing demand to advance the frontiers of scientific and engineering research in Earth and other fields have necessitated deep space networks (communication networks formed by satellites), one or more ground stations, and the corresponding collection of satellite-to-satellite and satellite-to-ground station links.The satellite system has been developed from single to multiple satellites, and the networking of system has become an inevitable trend.Those networks serve multiple purposes including being the communication backbone for deep space mission, aiding multi-point sensing for space investigations, security and surveillance, and so on [3].A typical example of such network is the NASA’s Deep Space Network (DSN), which is the organic structure of intelligent system in that it can be comprehensively utilized in accordance with the principle of the maximum effectiveness in the spatial information resources.
In this paper, the authors design a deep space node model.On the basis of node design, the DFRA scheme for DSON which supports directional multi-hop transmission is also proposed.
The routing problem has always been a core issue in the network.Routing algorithm directly affects the performance of the whole communication network and the quality of communication, and there is no exception in the DSN [4].The main challenges that affect routing in DSN include [5]: 1) Intermittent connectivity and frequent partitioning.Link outage may occur for reasons such as moving planetary bodies, harsh natural environment and interference and so on.Moreover, the network topology may be frequently partitioned because of intermittent connectivity of links and link connectivity is rather opportunistic in nature.2) Long and variable propagation delay.The deep space links may have extremely long propagation delays caused by long transmission distances.In addition, the movement of deep space satellites even adds to the variability of delay, and the movement of satellites can be considered while computing the routes or scheduling the packets.3) Link bandwidth asymmetry and high link error rate.The asymmetry in the data rates of the uplink and downlink channels is typically on the order of 1:1000 in scientific missions.Besides,due to the harsh natural environment and long propagation, the bit error rate for the deep space links is very high [6].4) Finite energy and high power requirement.The available energy of deep space nodes is finite, and the nodes depend on the rechargeable solar power to run their systems, which restricts the communication time periods of node.But the high power transmitters and extremely sensitive receivers are required for transmission across astronomical distances.So much energy will be consumed during signal transmission and reception.Most of these characteristics are unique to the space communication paradigm and thus lead to different research approaches from those in the terrestrial networks.Most importantly, there is no guaranteed continuous end-to-end multi-hop paths between sources and destinations owing to intermittently or partially connected dynamic topologies in DSN [7].So the conventional routing algorithms and routing protocols of terrestrial networks cannot be directly applied in DSN.
According to different emphasis, many scholars have designed a variety of routing algorithms for DSN.For example, ref.[8]considered the topology structure of the satellite network and addressed the issue of network topology variation with the minimum cost.Ref.[9] focused on the satellite link load problem, with the method of constraint route query area to achieve the balance of the network flow.Ref.[10] considered the QoS requirements and the information of multipath transmission.As a matter of fact, the DSN is also a special type of Delay Tolerant Networks (DTNs) [11], where the continuous end-to-end connectivity cannot be assumed.As its inception, the concepts behind the DTN architecture were primarily targeted at tolerating long delays and predictably-interrupted communications over long distance (i.e., in the DSN).Exiting routing algorithms of DTN can be classified basing on node mobility models and routing policies [12].Jain et al.formulated the DTN routing problem based on different knowledge about the new topology with the known network connectivity [13], but the proposed algorithms required error-free communication, and no effective solutions were given when unpredictable link failures occurred.However, these approaches for gathering the forwarding information through the network were not discussed.
According to the investigation above, the DSN is mainly based on the Radio Frequency(RF) communication.In this paper, we focus on the routing problem of deep space optical network (DSON).Compared with traditional microwave communication, laser communication has many advantages such as large-capacity, good confidentiality, lightweight, miniaturization and so on [14].With the maturation of space laser communication technologies and the development of deep-space exploration technologies, laser communication has been recognized as one of the most promising transmission technology of deep-space communication systems.DSON is expected to become an important foundation and inevitable development trend of future deep-space communication.Similarly, the DSON has the characteristics of long and variable propagation delays, intermittent connectivity, high bit error rates, power constraints and link asymmetry with DSN.In addition, the deep space nodes are also energy constrained, since solar energy is the only external source of energy.Nuclear reactors or rechargeable batteries can be used whenever the solar cells go dark, but it should be noted that even those are limited.Therefore, energy management in these nodes is a critical issue, as it is closely related with cost savings.Satellites with lower energy requirements can be equipped with smaller energy sources, all of which translate into weight savings which in turn provide economic benefits such as smaller launch vehicle or more fuel payload, resulting in longer system lifespan.Moreover, the DSON is based on laser communication with the advantages mentioned above.However, it also has some problems.For example, laser communication needs to be highly directional, which requires aiming,receiving and tracking between receiver and transmitter.Therefore, the DSON is sensitive to both angle and direction, which is the focus of this paper.
In this paper, we propose the DFRA for DSON.This scheme selectively forwards the packets in the routing, thus only a portion of nodes participate the flooding routing.Accordingly, the energy of nodes can be saved.Compared with TFRA, the DFRA can avoid the non-directional and blind transmission.Therefore, the energy consumption in message routing is reduced and the lifespan of DSON also can be significantly prolonged.Although the complexity of routing implementation is increased, the energy of nodes is saved and the transmission speed is obviously improved.
The remainder of this paper is organized as follows.Section 2 presents the problem statement.In Section 3, we propose the DFRA scheme for DSON.Simulation results are given and discussed in Section 4.Finally, Section 5 concludes this paper.
I.PROBLEM STATEMENT
2.1 Link model of DSON
The Earth is surrounded by the atmosphere.Due to gravity, the atmospheric quality concentrates almost exclusively in the height range of 100 km.The higher above the ground, the thinner the atmosphere is.Thus, in the deep space ranging from hundreds of thousands to several millions of kilometers away from the earth, there is no atmosphere, and the deep space is similar to vacuum.Therefore, in deep-space optical communication, signals in the transmission process are not affected by atmospheric turbulence [15].Deep space optical communication system uses laser beam as the wireless connection between transmitter and receiver, free space as propagation medium for carrying information.Generally, there are two types of optical wireless communication systems: non-line-of-sight (NLOS) system and line-of-sight (LOS) system.Although the NLOS system solves the problem of mobility,the severe shadowing caused by the multipath propagation will lead to massive loss.LOS system provides excellent transmission capacity because the link is obstacle-free.In addition, the communication distance of deep space optical communication is of the order of thousands of kilometers, so the LOS system is the best choice.
For the LOS system, according to [16], the received power is given by:

Fig.1 Process of the TFRA


2.2 TFRA scheme
TFRA is a broadcast routing protocol [18],which does not need to maintain the topological structure and the routing computing.The procedure can be simply described as follows:If the source node needs to send data packets to the destination node, the source node firstly sends the copies of data packets to each of its neighbor nodes.Then, neighbor nodes will broadcast the copies to their neighbor nodes in addition to the ones that send them the copy.So it goes on until one of circumstances appears as follows: 1) The data packets have been sent to the destination node.2) The life cycle of data packets becomes zero.3) All the nodes have the copies of data packets.
Figure 1 presents the process of TFRA.Node 0 and node 6 are the source node and destination node, respectively.Node 1, 2, 3, 4,5, 7 and 8 are the other nodes of network.Assumed that node 0 will send the data packets to node 6, and then we will find a path from node 0 to node 6.Firstly, node 0 sends the routing request to neighbor node 1, 2, 7, and 8.When node 1 and node 2 receive the routing request,they will send the routing information to their neighbor node 3, 4 and node 5.Meanwhile,node 5 receives the same packet from node 1 and node 2.In this case, node 5 will forward the first data packets to all its neighbor nodes,and discard the later and same data packets.Finally, node 6 receives the data packets from node 5, and the data transmission from source node to destination node is completed.
The advantage of TFRA is that the routing implement is relatively simple, and it does not need to maintain the network topology information and consume the computing resources to achieve the complex routing discovery.Thus, it is usually used in the applications with higher robustness.However, from the realization process of TFRA, it also has the following disadvantages [19]: 1) It blindly uses the network resource without any consideration of the node energy.The nodes of DSON are usually powered by the solar energy, and the received solar energy of deep space nodes is inversely proportional to the square of their distance from the sun.For those deep space nodes that are far away from the sun, the node energy is extremely valuable due to the lack of sunlight.In TFRA scheme, all nodes must forward the data packets, which mean massive energy consumption.Due to the dissipation of energy, this may leads to the death of some network nodes, which will no doubt compromise the network connectivity and even reduce the survivability of the overall network.2) It may cause the problem of data implosion.That is, a node may repeatedly receive the same data packets.This is because each node of the network must forward the data packets regardless of whether it is in the forwarding path.This leads to a large number of useless messages in the network, as a result, it will cause severe waste of resources for the limited storage of DSON, and the node energy will be consumed excessively.
II.THE DFRA SCHEME
3.1 Node design of DFRA scheme
In this paper, according to the characteristics of DSON, we propose a DFRA scheme.The main idea of our method is to selectively forward the data packets to the nodes within a specific coverage area of the nodes instead of all the nodes in the network.In this way,only a portion of nodes will participate in the packet forwarding process.Each node that receives the data packets will choose its own specific coverage area to forward the data packets based on data information.Thus, in the DFRA, the number of forwarding nodes is reduced significantly, so are the forwarding hops.Moreover, the network resources are effectively saved.
We design the node structure for DSON,and there is a set of transceiver on each node.The transmitter is equipped with 6 laser transmitters, and the coverage area of each laser is a sector with the angle of 60 degrees.The receiving device is an omni-directional detector that can receive data from any direction.Firstly, each node will acquire the network topology through neighbor nodes discovery and regular information exchange.During the process of routing discovery, the signals will be detected and received by the detector, which will determine the location of the signal source basing on the signal intensity, so as to adjust the angle to receive the signals.Moreover, the next hop will be determined according to the received information, and then the appropriate laser transmitter will be selected to transmit the signals until the destination node is found.The specific process is shown in Fig.2.Assuming the transmission distance of each node is R, the 6 laser transmitters of source node S are divided into 6 sectors, and the farthest coverage distance of each sector is R with the angle of 60 degrees.When the source node S intends to send the messages to destination node D, the source node will find the locations of intermediate node A, B and C.Thereafter, the source node S will know which piece of coverage area its neighbor nodes are in.If the horizontal angle between the neighbor nodes and the source node is withinnode C can be determined in the No.1 coverage area of source node S, and node A and node B are in the No.3 and No.6 coverage areas of source node S, respectively.Once the location of each intermediate node of the source node S is determined, source node S will learn that node C is the neighbor node of destination node D by exchanging the information.Then, source node S will send the information to node C by the laser of No.1 coverage area.Similarly,node C sends information to the destination node D by the laser of No.2 coverage areas.Finally, the data transmission is completed between the source node and destination node.
Because the DSON is sensitive to the angle and direction, we thoroughly consider both direction and azimuth on the node design,and the node model is equipped with multiple transmitters.In addition, with the increase of deep space network nodes, when the node density is larger, the node model can combine the space division multiplexing with frequency division multiplexing.Namely, we use different wavelength lasers to transmit the signals in different directions.The DFRA with this node design can effectively avoid the disadvantages of TFRA such as non-directional and blindness.Therefore, the energy consumption in message routing will be reduced and the lifespan of DSON also can be effectively prolonged.

fig.2 Process of the DFRA
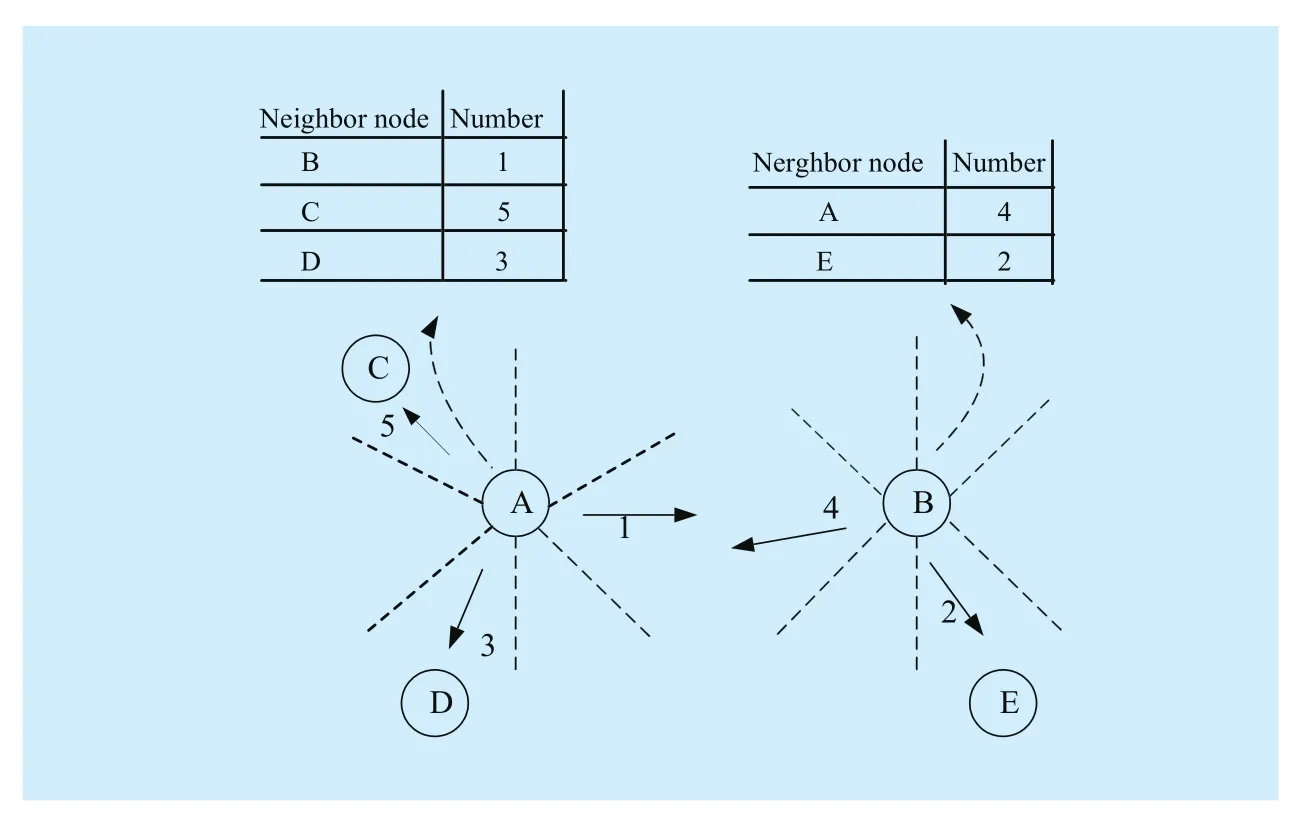
Fig.3 Com munication scenario of DFRA scheme
3.2 Overview of DFRA scheme
Figure 3 shows a communication scenario of DFRA scheme.We can see that each node will record its neighbor nodes and the corresponding number of laser transmitters.The DFRA scheme mainly includes judging whether the channel is idle, exchanging request to send/clear to send (RTS/CTS) frame, and sending/receiving data packets.The specific process is as follows:
1) Judging the idle channel
All of the nodes are in the idle scanning mode before communication.According to Fig.3, assuming that node A will send data packets to node B.Firstly, the node A will judge whether the channel is idle.Our node design has 6 laser transmitters, thus each node has multiple directional network allocation vectors, which can be used to judge whether the channel is idle.If the directional network allocation vector of node A corresponding to node B is zero, it denotes that the channel is idle.Otherwise, the node 1 returns to the initial idle channel scanning mode.
2) Exchanging the RTS/CTS
Assuming that the channel of node A and node B is idle, node A will select the optimal laser transmitter to send the RTS frame.Node B receives the RTS frame and sends a CTS frame to node A.If neighbor nodes received the RTS frame that is not meant for them, they will update the directional network allocation vector.
3) Sending/receiving data packets
When node A and node B successfully exchange RTS/CTS, it is shown that the channel can be reserved successfully.The neighbor node of node A selects the 1 laser transmitter corresponding to the direction of node B to send data packets.When node B receives the data packets from node A, node B similarly chooses its 4 laser transmitter corresponding to the direction of node A to reply the acknowledge (ACK) frame.Once node A successfully receives the ACK frame, the data packets from node A to node B can be transmitted successfully.
3.3 Algorithm description
According to the characteristics of deep space optical communication, this paper proposes the DFRA scheme for DSON.The basic idea is that source node and the intermediate nodes respectively calculate their directions to the destination node, and forward the information towards the destination node.The intermediate nodes directly forward the data to each of their next one hop nodes towards the destination node, and this process will continue until the destination node successfully receives the data packets.In this paper, we first design the deep space optical communication channel model according to mathematical model of deep space optical communication transmission channel.Secondly, we configure the simulation scenario.The main parameters that need to be set include nodes number, the coordinates of nodes, the number of hops, the movement time of nodes, speed, direction and so on.Finally, we need to edit the application files to analyze the simulation results, such as throughput, delay and delay jitter, etc.
The specific algorithmic steps are as follows:
Step 1: Initialize DSON.Each node maintains a routing table, which can be used to record its neighbor nodes and the number of sector towards the neighbor nodes.In addition,the nodes energy is initialized, and the source node and destination node are set.
Step 2: Determine the intermediate nodes between the source node and the destination node according to the destination node information.Then, the source node calculate the horizontal angle of the next hop neighbor nodes, thus, source node can learn about which piece of coverage area his neighbor nodes are in, and select the corresponding laser transmitter of coverage area to send data packets toward the neighbor nodes.
Step 3: When the intermediate nodes receive the data packets from source node, they will judge whether the data packets have been received or forwarded.If so, the data packets will be discarded.Otherwise, the data will be added in the cache.Thereafter, the next hop node will be determined according to the data information.Then, compute the coverage area of next hop node, and forward information by the corresponding laser transmitter, it is until the destination node receives the data from the source node.
Step 4: The algorithm ends, and the simulation results are saved.
IV.SIMULATION RESULTS
4.1 Simulation settings

Fig.4 Si mu lated topology with 10 nodes

Table I Simulation parameters of DSON
The simulation is based on NS2 software.Figure 4 shows the simulated topology with 10 nodes.We set a DSON with 10 nodes randomly distributed in a 500×500 square area.The initialization energy of each node is 10J.The specific parameter settings are shown in Table 1.Each node is equipped with 6 laser transmitters, and the coverage area of each laser transmitter is a sector with the angle of 60 degrees.This node design can achieve omni-directional coverage in the communication as well as combine the space division multiplexing with frequency division multiplexing, thus making the system more flexible.The appropriate lasers to send the signals will be chosen during the forwarding process.Moreover, each node is also equipped with a detector to receive the signals, which is also omni-directional and is capable of receiving data from any direction.
4.2 Results and analysis

F ig.5 R e maining energy of two flooding models
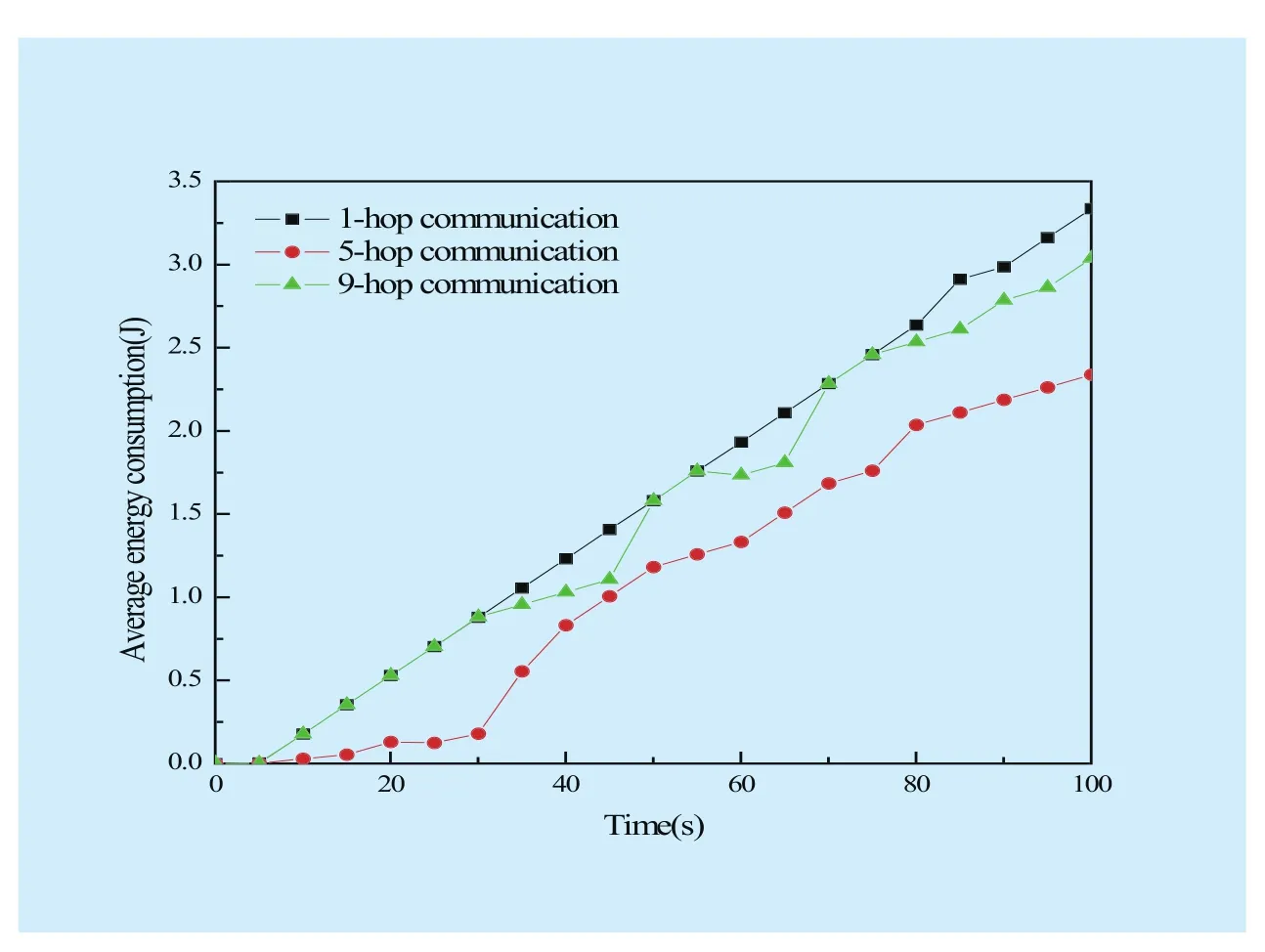
fig.6 Average energy consumption with different hop number
In this subsection, we estimate the performance of DFRA based on the settings of parameters mentioned in the previous subsection.The simulation results are shown in two parts.A comparison of the remaining energy between TFRA and the proposed DFRA is shown in Fig.5.Fig.6 shows the average energy consumption of DFRA in different hops communication.As is shown in Fig.7, Fig.8 and Fig.9, we thoroughly investigate the delay, jitter and throughput of DFRA and TFRA.The simulation results prove that DFRA outperforms TFRA in all aspects.
Figure 5 presents the remaining energy of TFRA and the proposed DFRA.With the increasing of the simulation time, the remaining energy of TFRA and DFRA decrease.It can be seen that the remaining energy of DFRA is more than TFRA which proves that the DFRA is more energy efficient than TFRA.This is because in TFRA, each node broadcasts the messages to all its neighbor nodes and all nodes will be involved in the transmission of information.While in the proposed DFRA, the message routing occurs only in a specific routing area towards the destination node, that is,the nodes outside the routing area will not receive the messages, so the number of nodes on the transmission path will be relatively small.Consequently, when the data packets are transmitted from source node to destination node,the number of forwarding nodes in TFRA is more than DFRA.Obviously, the fewer nodes participate in the flooding, the more remaining energy will be.Therefore, the network resources will be effectively saved.
Figure 7 shows the delay performance of TFRA and DFRA.As expected, we can see that the delay of TFRA is obviously higher than that of DFRA, and the fluctuation of delay curve for TFRA is more than that of DFRA.The reasons are as follows.Firstly, the simulation time is 10s and the time distribution for the delay values is random.Thus, the distribution of delay value can be non-uniform in Fig.7.Secondly, the TFRA broadcasts the messages to all of its neighbor nodes, and then the neighbor nodes will broadcast the messages to their neighbor nodes.If it goes on like this, the number of hops from source node to destination node will be more than that of DFRA.In order to avoid broadcasting collision, each hop in the MAC layer will have a random delay.Therefore, the more number of hops is, the larger end-to-end delay will be.On the contrary, our DFRA adopts directional routing diffusion method, so only a portion of nodes will be involved in the transmission of information.Thus, the hops from the source node to destination node are effectively re-duced, so is the end-to-end delay.

Fig.7 Delay of two flooding models

Fig.8 Jitter of two flooding models
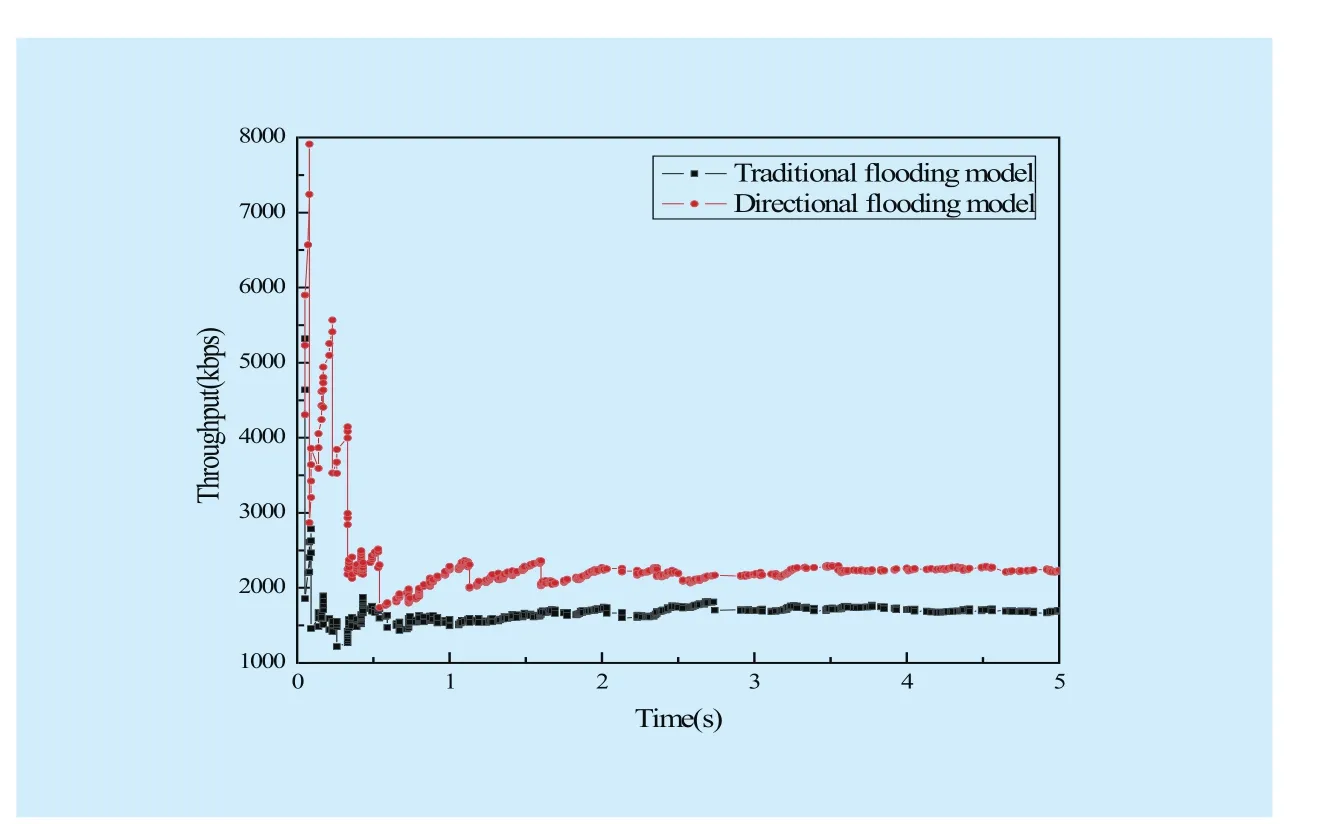
Fig.9 Throu ghput of two flooding models
The jitter performance of TFRA and DFRA is presented in Fig.8.It can be seen that the delay jitter of DFRA is smaller than TFRA.Based on the above analysis, we can deduce that the number of hops of TFRA is more than that of DFRA.However, due to the impact of multi-hop communication, the collision probability of data packets will increase with the increasing of hops.Consequently, the delay jitter will increase greatly.Thus, we can conclude that the performance of DFRA is better than TFRA.Figure 9 shows the throughput performance of TFRA and DFRA.With the increasing of simulation time, we can see that the throughput of TFRA and DFRA are up to the maximum at the initial time and gradually become stable.Moreover, the throughput of DFRA remains higher than that of TFRA all the time.Compared with the TFRA, the coverage distance of DFRA is relatively further,which can arrive at the destination node by the least hops.Thus, DFRA has less node competition and larger throughput.In summary,the proposed DFRA scheme is a promising scheme for the future deep space optical communication.
V.CONCLUSIONS
In this paper, based on the characteristics of deep space optical communication, firstly, we have designed a deep space node model capable of combining the space division multiplexing with frequency division multiplexing.On the basis of node design, the DFRA scheme for DSON which supports directional multihop transmission is also proposed in DSON.Simulation results show that the DFRA can avoid the disadvantages of TFRA such as non-directional and blind transmission.Moreover, the remaining energy of DFRA is significantly more than that of the TFRA,which indicates that the energy consumption in message routing is effectively reduced and the lifespan of DSON can also be prolonged.In addition, the average energy consumption with different hops communication on DFRA is analyzed.The results show that with the optimal hops communication, the average energy consumption can be minimized.In conclusion,although the complexity of routing implementation is slightly increased, the energy of nodes is successfully saved and the transmission speed can be improved.The performance of DSON can be significantly improved.In summary, the proposed DFRA scheme is a promising scheme for the future deep space optical communication.
ACKNOWLEDGEMENT
This work was supported by National Natural Science Foundation of China (61471109,61501104 and 91438110), Fundamental Research Funds for the Central Universities (N140405005, N150401002 and N150404002), and Open Fund of IPOC(BUPT, IPOC2015B006).
[1] L.Zhang, X.W.Zhou.“Joint Cross-layer Optimised Routing and Dynamic Power Allocation in Deep-space Information Networks under Predictable Contacts”,IET Communication, vol.7, iss.05, pp.417-429, Jun.2013.
[2] X.Y.Li, F.H.Lin, Y.J.Meng.“Research on Multicast Routing in Deep Space Sensor Network”,International Conference on Multimedia Information Networking and Security, pp.648-651,Nov.2012.
[3] V.Maramreddy, O.Amadasun, V.Sarangan, et al.“Routing In Deep-Space Satellite Networks With Lossy Links”,IEEE Aerospace Conference,pp.1-10, Mar.2007.
[4] Y.Lu, Y.J.Zhao, F.C.Sun, et al.“Dynamic Fault-Tolerant Routing Based on FSA for LEO Satellite Networks”,IEEE Transactions on Computer, vol.62, iss.10, pp.1945-1958, Oct.2013.
[5] C.Chen, Z.S.Chen.“Routing Different Traffic in Deep space Networks”International Workshop onSatellite and Space Communications, pp.237-241, Sep.2007.
[6] A.Sekhar, B.S.Manoj, C.S.R.Murthy.“MARVIN:movement-aware routing over interplanetary networks”,IEEEConference onSensor and Ad Hoc Communications and Networks, pp.245-254, Oct.2004.
[7] J.Zhao, K.J.Dong, J.J.Yu, et al.“DSN: A Knowledge-Based Scholar Networking Practice Towards Research Community”,International Conference on eScience (eScience), pp.238-244,Oct.2013.
[8] M.Werner, C.Delucchi.H.J.Vogel, et al.“ATM-based Routing in LEO/MEO Satellite Networks with Intel Satellite Links”,IEEE Journal of Selected Areas in Communications, vol.15, iss.1, pp.69-82, Jan.1997.
[9] R.Y.Qiao, X.G.Zhao.“The Research and Simulation of the Satellite Network Routing Algorithm based on Game Theory”,International Conference on Information Science and Cloud Computing, pp.124-130, Dec.2013.
[10] G.H.Song, M.Y.Chao, B.W.Yang, H.Zhong, Y.Zheng.“Research on the Strategy of the Multipath QoS Routing of Satellite Network”,Journal of Spacecraft, vol.31, iss.6, pp.1-3, Sep.2012.
[11] P.Puri, M.P.Singh, “A Survey Paper on Routing in Delay-tolerant Networks”,International Conference on Information Systems and Computer Networks, pp.215-220, Mar.2013.
[12] W.J.Li, L.Yao, L.F.Feng, “Research on unicast routing for deep space sensor networks based on DTN”,International Conference on Multimedia Information Networking and Security, pp.616-619, Nov.2012.
[13] S.Jain, K.Fall, R.Patra, “Routing in a delay tolerant network”,ACM SIGCOMM, pp.145-158,Aug.2004.
[14] H.Hemmati, A.Biswas, I.B.Djordjevic, “Deep-Space Optical Communications: Future Perspectives and Applications”,Proceeding of the IEEE,vol.99, iss.11, pp.2020-2039, Nov.2011.
[15] X.R.Wang, Y.J.Liu, L.Guo, et al, “Potential of vortex beams with orbital angular momentum modulation for deep-space optical communication”,Optical Engineering, vol.53, iss.5, pp.1-9,Nov.2014.
[16] B.Patnaik, P.K.Sahu, “Inter-satellite optical wireless communication system design and simulation”,IET Communication, vol.6, iss.16,pp.2561-2567, Jan.2013.
[17] X.R.Wang, L.Guo, L.C.Zhang, et al, “Link design of Moon-to-Earth optical communication based on telescope array receivers Optics Communications”, vol.310, pp.12-18, Jan.2014.
[18] L.L.Zhao, G.Q.Liu, J.Chen, et al, “Flooding and Directed Diffusion Routing Algorithm in Wireless Sensor Networks”,IEEE International Conference on Hybrid Intelligent Systems, pp.235-239.Aug.2009.
[19] D.Cokuslu, K.Erciyes, “A flooding based routing algorithm for Mobile Ad Hoc Networks”,IEEE Signal Processing, Communication and Applications Conference, pp.1-5, Apr.2008.
[20] D.Bai, W.R.Shi, P.Gao, et al, “Hop optimized unequal clustering routing algorithm for wireless sensor networks”,Computer Engineering and Applications, vol.48, iss.32, pp.60-64, Oct.2012.
杂志排行

China Communications的其它文章
- A Non-Cooperative Differential Game-Based Security Model in Fog Computing
- Dynamic Weapon Target Assignment Based on Intuitionistic Fuzzy Entropy of Discrete Particle Swarm
- Offline Urdu Nastaleeq Optical Character Recognition Based on Stacked Denoising Autoencoder
- Identifying the Unknown Tags in a Large RFID System
- Reputation-Based Cooperative Spectrum Sensing Algorithm for Mobile Cognitive Radio Networks
- Toward a Scalable SDN Control Mechanism via Switch Migration