基于TR—Thread的人物识别四翼飞行器设计
2017-05-08周忠容俞文武陈元伟张海兵曹吉花
周忠容+俞文武+陈元伟+张海兵+曹吉花
摘 要:本文研究的是基于TR-Thread实时操作系统并借助搭建云台的图传向上位机输送图像以达到人物是别功能的飞行器。控制系统是以STM32系列的单片机为核心处理器,通过采集传感器的数据,利用PID控制算法对电机调速器进行控制,从而实现飞行器的稳定飞行。
关键词:TR-Thread;STM32单片机;飞行器
DOI:10.16640/j.cnki.37-1222/t.2017.08.244
1 引言
本项目通过对四旋翼飞行器动力学原理分析,建立了系统的动力学模型[3],对系统进行整体的设计,旨在进一步提高四旋翼的飞行稳定性和良好的跟踪性能,实现避障和人物识别的功能[4],对未来的发展具有一定的现实意义。
2 基于TR-Thread识别人物的四翼飞行器的总体设计方案
主控芯片是 STM32 系列的 ARM 控制芯片,它是ST公司的 Cortex-M3 内核的处理器且基于ARMv7体系结构的处理器内核[5]。通过IIC对9轴传感器MPU6050的加速度、角度进行采集,再运用卡尔曼滤波算法对采集到的数据进行融合,得到有用的数据。最后借助增量式PID算法和电机调速器对电机的转速和转向进行控制,从而实现飞行器的稳定飞行。此外,搭建云台的图传向上位机输送图像,单片机将采集到的图像与事先存储的图像进行对比,当两幅图像的相似度大于某一个阈值时,我们便认为两者相同,反之亦然,以此来实现人物的识别 。
其中,我们对滤波算法进行了试验,分别使用了互补滤波、卡尔曼滤波和清华滤波,我们发现卡尔曼滤波在此系统上最合适。最终的结果是飞行器能够稳定的飞行,并且能通过图传输送的画面识别简单的人物轮廓。
3 硬件电路设计
硬件电路分为外部通信模块、单片机最小系统模块、 存储模块、电源模块、传感器模块。下面分别介绍下电源模块、传感器模块和电机驱动模块。
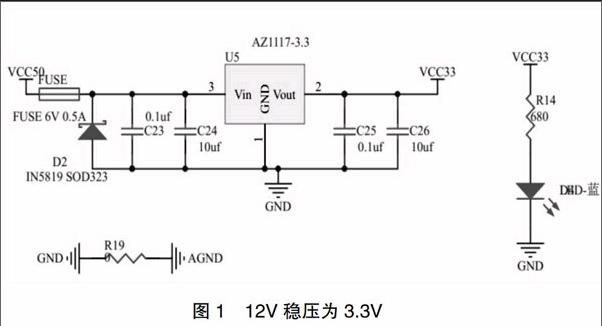
3.1 电源模块电路
整个系统是通过1节12V电池来给无刷电机供电,然而单片机系统、传感器模块需要的是3.3V电源。所以我们需要对电源进行降压设计。通过AMS117电源芯片稳成系统需要的3.3V电源,前后均有濾波电路和防过载电路。以下是设计的硬件图。
3.2 传感器模块电路
系统需要应用陀螺仪、加速度计传感器、三轴电子罗盘,我们采用的陀螺仪和加速度计传感器是集成了二者的MPU6050及AK8975。MPU6050和AK8975中的数据是通过IIC进行读取。 4 软件代码调试
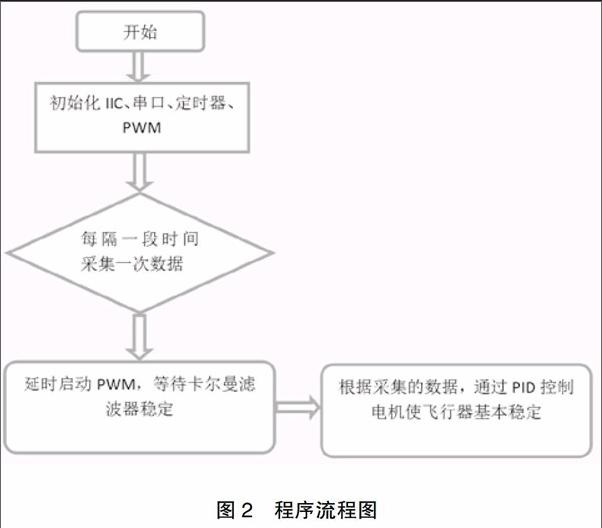
系统开始工作,首先初始化IIC、UART串口、PWM、定时器,初始化结束程序进入大循环。把四旋翼飞行器水平方向放好,STM32单片机开始采集MPU605和AK8975的数据,通过PID控制无刷电机的转速,飞行器稳定飞行,程序结束。
5 结论
本文针对四旋翼飞行器的系统设计与研究,成功实现了飞行器的平稳飞行。通过多次的试验表明,传统的PID控制器只能针对机械结构固定的飞行器控制,通过反复试验的方法找到较为合适的控制参数最终实现控制功能。在此过程中学习了硬件结构,软件调试、了解了卡尔曼滤波和PID算法功能。接下来将以此为基础,更加深层次地研究四旋翼飞行器的设计过程,以更好的满足飞行器控制的要求,具有很好的应用前景。
参考文献:
[1]刘焕晔.小型四旋翼飞行器飞行控制系统研究与设计[D].上海:上海交通大学,2011.
[2]鲍凯.玩转四轴飞行器[M].北京:清华大学出社,2015.
