基于飞思卡尔单片机的智能车金属检测与控制方案
2017-05-08叶亮时锐孙小杰卫驰毛人杰
叶亮++时锐++孙小杰++卫驰++毛人杰++李志伟
【摘 要】本文针对沿金属轨道行进智能车问题,提出金属检测方案,利用模糊控制原理,经过PID调节,实现了小车稳定的寻迹行进。
【关键词】飞思卡尔;传感器算法;金属传感器;智能车
引言
随着智能交通运输的发展,智能车已成为当今社会的研究热点。对于能够快速寻迹行进的智能车,在路径检测与舵机和电机的控制上都有着较高的要求。
1.检测方案
1.1 传感器原理
在传感器的选择上,使用了74HC123D和LMV722IDR芯片的运放电路。该电路的特点是可以将金属信号转变为高低电频信号,再由单片机的AD端口进行处理就可实现有无轨道的判断。
1.2 传感器布局
由于传感器数量没有限制,所以传感器用多少个,怎么摆放便成了关键的问题。放的太少,小车便容易丢线;放的太多,控制策略會变得很复杂,不利于编程和调试。传感器之间间隔过大,就会在间隔之间出现控制的空白区域;传感器之间间隔过小,线圈之间便会产生互感现象,影响采集数据的准确性[1]。
传统传感器布局有一字型和八字型。一字型布局是传感器最常用的布局形式,即各个传感器都在一条直线上,从而保证纵向的一致性,其控制策略主要集中在横向上。八字型布局是将中间的若干传感器前置,这样增加了纵向特性,能够早一点了解到车前方的道路情况。
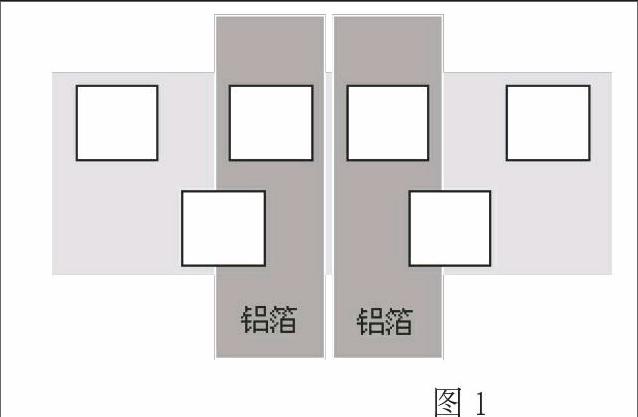
经过反复的尝试与调整,传感器采用了图1所示的倒品字形摆法。最前端四个传感器一字排开,外侧传感器完全在铝箔外,内侧传感器完全在铝箔内;后方两个传感器都是一半覆盖在铝箔上,另一半在铝箔外。经测试,融合了一字型和八字形优点的倒品字形摆法不仅能对小车过弯进行提前的判断,从而提早做出反应,更能对小车相对轨道的偏移进行更加精确的调整,使得小车能够更加稳定地贴合轨道运动。
2.控制方案
2.1程序控制流程
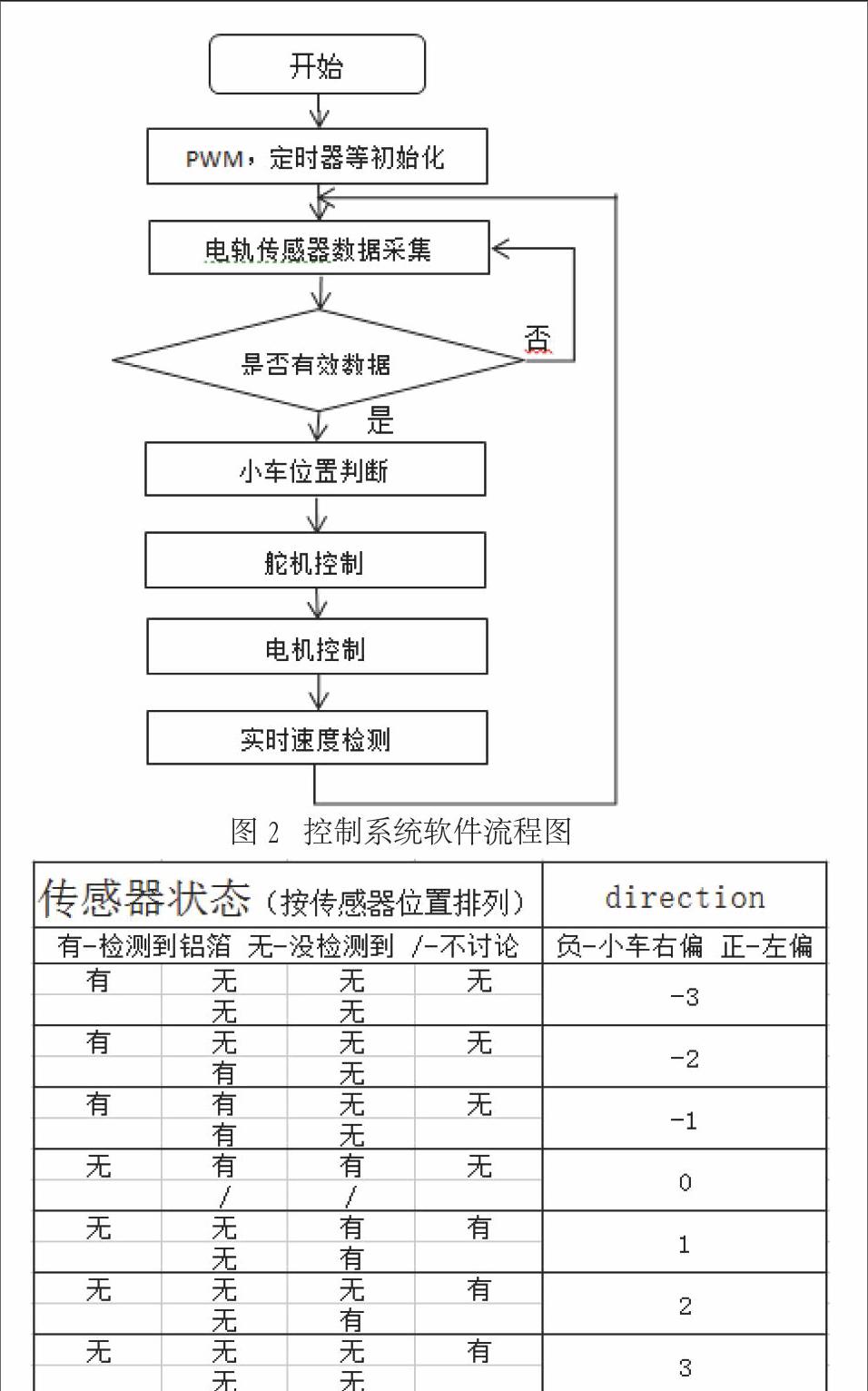
智能车的运行控制是根据路径识别和车速检测所获得的当前路径和车速信息,控制舵机和直流驱动电机动作,从而调整智能车的行驶方向和速度。控制系统的软件设计基于IAR 7.3编程环境,单片机使用飞思卡尔公司K60芯片,程序使用C 语言实现。如图2。
2.2转向控制策略
该金属传感器可以对其底部覆盖的金属进行识别,金属覆盖面积越大,传感器得出的数值越小。经检测,当传感器完全被铝箔覆盖时其读数为2,在空气中时其读数为1024,且2和1024之间几乎没有过渡,所以该传感器只能对是否完全被铝箔覆盖进行判断。
由于小车传感器部分的复杂性,很难建立精确的数学模型,因此在这里考虑使用模糊控制的方法控制舵机。
如图3所示,舵机控制程序采用基于模糊控制理论的方法,根据6个传感器所能接收到的7种状态进行量化处理。表格中每种传感器状态都是按照前4后2的方法排列,和实际传感器的摆放方法一样,方便对照和查看。右边一栏则是对小车位置的量化,其代表的小车偏离位置为{右大,右中,右小,零,左小,左中,左大},对应整数集为{-3,-2,-1,0,1,2,3}[2]。
在舵机转向时采取了简单实用的的PID算法,主要对两个参数的调整来实现:比例控制参数P和微分控制参数D。比例控制参数P可以使得车模方向恢复正确位置。当该参数逐步增加时,车模方向回复速度逐步加快。当比例参数增加到一定数值之后,车模的方向回复由于过快,会出现方向过冲现象。此时通过增加微分控制参数D可以抑制这种方向过冲的现象[3]。
小车的偏离程度为偏离位置的参量绝对值,一共有四种,即{0,1,2,3},根据每一种情况,经过实际的测量与调整,可以分别得到一组合适的P和D参数,使得车模在方向偏移时即能迅速调整回来又不会出现过冲现象[4]。
2.3速度控制策略
根据小车的偏移量,电机会适当的调整其速度,以使得小车在过弯时不会因为速度过快而冲出轨道。小车偏移量越大,电机输出功率略小。
3.评测结果
经过调试,小车在直道上的速度可以达到2m/s,在转弯时速度变为1.5m/s。在选定合适的PID参数后,小S弯道可以近乎直线通过,而在90度弯和连续弯道可以紧贴内道,保证了最优路径,在长直道入弯时也能做到提前转弯,基本实现了小车在最优路径下的高速、平稳行驶。
4.结论
该智能车使用飞思卡尔K60单片机作为核心控制单元,自行设计了采集信号的传感器,编写了基于模糊控制和PID控制的程序,最终实现了智能车平稳、快速地寻迹行进。
参考文献:
[1]高月华.基于红外光电传感器的智能车自动寻迹系统设计,2009.
[2]贾勇.基于模糊控制算法的智能车转向舵机控制,2008.
[3]王祥好.模糊PID算法在智能小车中的研究与应用,2009.
[4]史彬,牛岳鹏,郭勇.飞思卡尔摄像头智能小车设计及舵机算法优化,2012.
课题项目:
本文为上海工程技术大学科研项目(E3-0502-16-XS01017)、上海工程技术大学创新训练计划(E3-0800-16-02056)项目成果。
