雷达对空探测威力表征计算方法研究
2017-05-08余华吴文全刘岚
余华+吴文全+刘岚
摘要:针对雷达研制厂所给出的雷达探测垂直威力图的局限性,提出了雷达对空探测威力的一种新的表征形式,为雷达对不同RCS目标在各高度突防时的最远发现点在地球曲面上的投影距离,该投影距离能体现防空作战中雷达对战斗机攻击行动的快速反应能力。随后给出该威力表征形式的计算方法,最后计算了某典型中低空搜索雷达的探测威力,结果表明,该雷达对高空和300m以下高度突防战斗机的探测能力较弱,尤其是针对高空突防的隐身战斗机。
关键词:雷达探测威力;中低;表征方法
中图分类号:TN959文献标识码:ADOI:10.3969/j.issn.10036199.2017.01.029
1引言
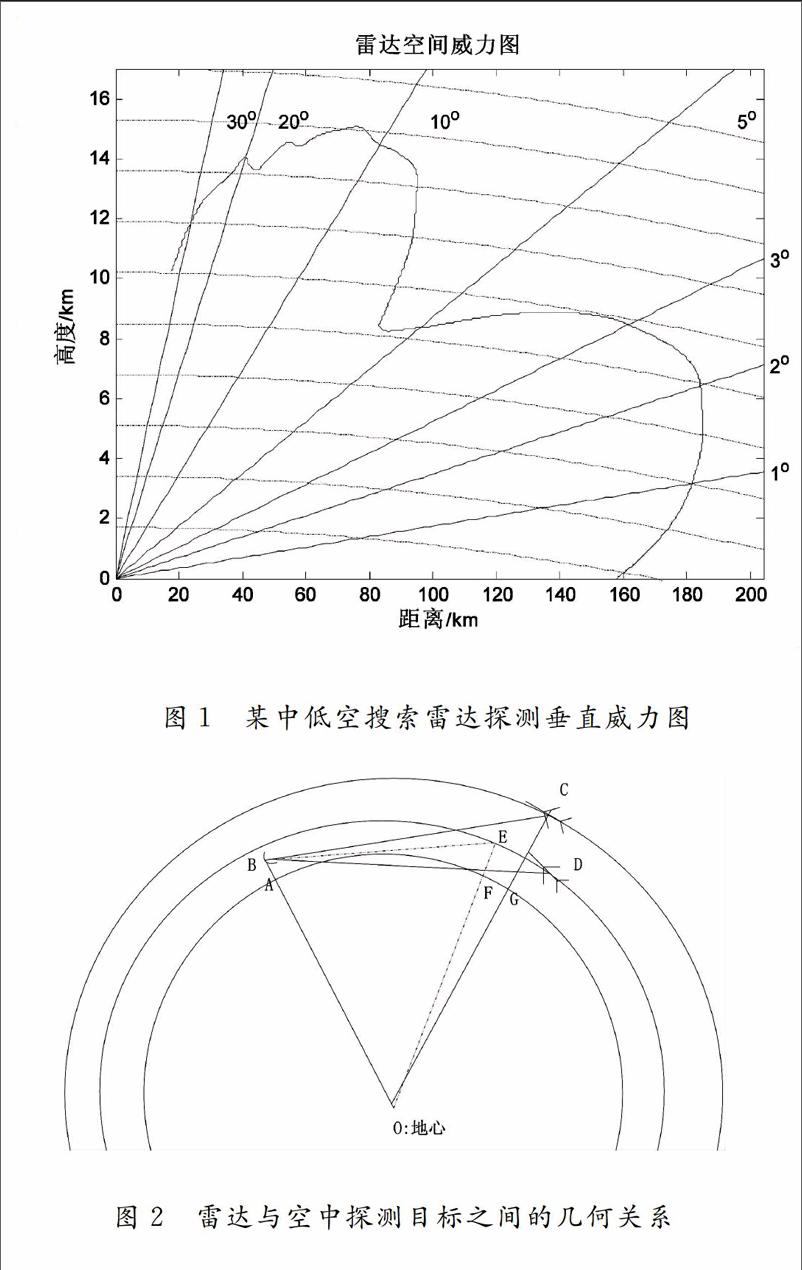
雷达研制厂所在交付装备时会给出雷达探测垂直威力图,从该图中能直接读取雷达对不同高度(仰角)空中目标的最大探测距离值,这些指标值根据雷达技术参数和目标RCS大小经雷达方程计算得出,并通过检飞试验验证[1]。然而该雷达威力图并不能全面反映对空警戒雷达在目前典型防空战术背景条件下的探测能力,主要局限性体现在两个方面:一是垂直威力图给出的指标值仅是针对指定RCS目标的计算结果,不同目标的RCS不同,垂直威力图不能直接给出雷达对其他RCS目标的探测能力;二是垂直威力图不能详细描述雷达对低空突防目标的探测能力。图1是某典型中低空搜索雷达对RCS为2m2目标探测的垂直威力图[2],该图给出了雷达对2000m以上高度飞行目标的探测能力,而未能给出雷达对2000 m以下高度目标的探测能力。现代战争表明,战斗机在攻击行动中,通常会选择在较低的高度进行突防,雷达对低空目标的探测是雷达探测能力评估的一个重要关注点。论文针对雷达探测垂直威力图的上述局限性,提出了雷达探测威力的新的表现形式及其计算方法,利用该方法计算雷达对典型空中目标的探测威力,并对计算结果进行进一步分析。
2雷达探测威力表现形式及计算方法
战斗机在进行反舰和对地攻击行动时,通常会选择在某个高度层进行突防,当逼近至导弹的射程之内时开始发射导弹。如果在战斗机突防阶段能及时发现目标,并在导弹发射之前进行有效拦截,能大大提高防空作战的效能[3]。基于以上原因,提出雷达对空探测威力的表现形式,为雷达对不同RCS目标在不同高度条件下最远发现点在地球曲面上的投影距离(简称为水平距离)。与反舰导弹或对地攻击导弹的射程相比较,水平距离能直观反映防空作战中雷达对战斗机攻击行动的快速反应能力,
首先根据目标RCS、雷达威力图和雷达方程计算雷达对各仰角目标的最大探测距离,然后根据雷达与目标之间的几何关系计算雷达对各高度层目标探测的水平距离。
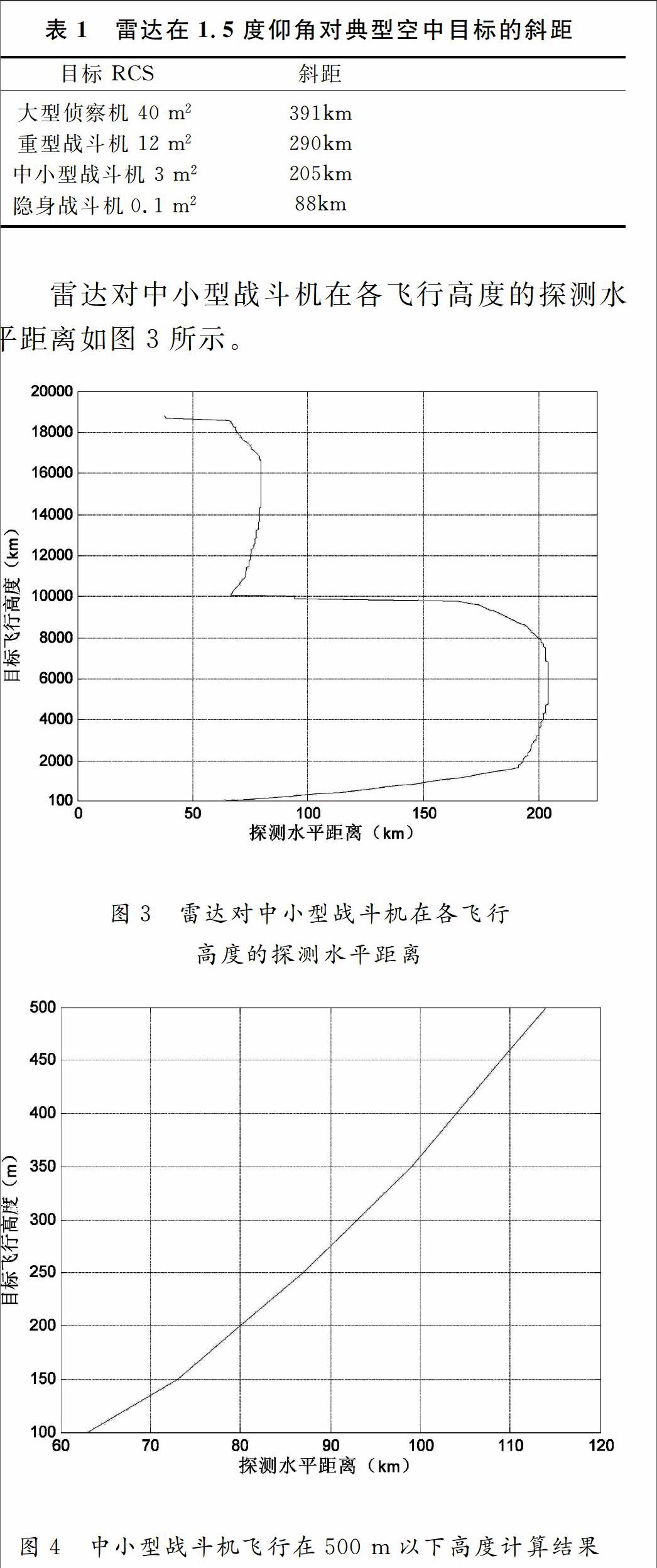
可以看出,当目标飞在300 m以下高度飞行时,雷达探测水平小于100 km,而当前服役的机载反舰导弹或者对地导弹的射程大都超过100 km[6],因此,当中小型战斗机选择在300 m以下高度进行突防和攻击时,雷达无法在导弹发射之前发现目标。因此该区域是中小型战斗机突防的最佳区域,也是防空预警探测的薄弱区域。
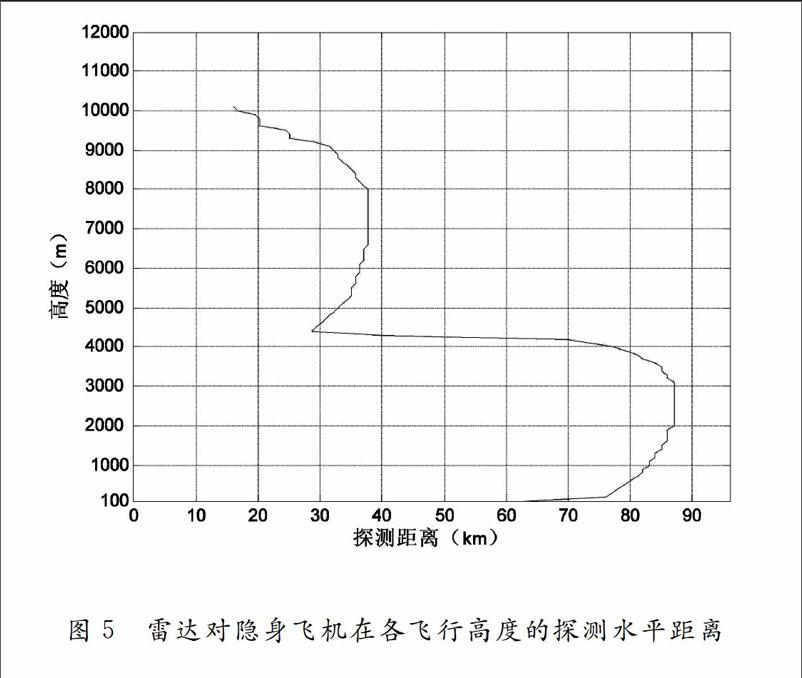
同理,计算雷达对隐身战斗机在各飞行高度层的水平探测距离如图5所示。
可以看出,无论隐身飞机从哪个高度突防,雷达探测的水平距离都不超过90 km,小于机载反舰导弹或对地导弹的射程,其中,当隐身飞机在4 500 m以上高度突防时,雷达探测水平距离不超过40 km,并且小于在100 m高度突防时的探测水平距离,所以隐身飞机选择从高空突防被探测到的概率更低,这是由于对空警戒雷达为有效利用探测能量对天线方向图进行了低空赋形所致。可以看出,目前常规对空警戒雷达难以对抗高空突防的隐身目标,必须采取有效手段[7-17]。
3结束语
文章提出了在一定战术背景条件下雷达对空探测威力的表征计算方法,即先根据雷达指标威力图、目标RCS和雷达方程计算雷达对各仰角目标的最大探测距离,然后利用雷达与目标之间的几何关系求解出雷达对目标在各高度上最远发现点在地球曲面上的投影距离。该投影距离能体现防空作战中信息系统对目标攻击行动的快速反应能力。可以得到该方法可为舰载和岸基雷达对空探测能力的评估提供定量分析手段。
参考文献
[1]仇放文.雷达威力试飞技术[J].现代雷达,2011,33(8):17-20.
[2]贾玉贵编著. 现代对空情报雷达[M]. 北京: 国防工业出版社,2004年4月.
[3]王小谟.雷达与探测-信息化战争的火眼金睛[M], 北京:国防工业出版社, 2008年5月.
[4][美]米切尔 R L著,陈训达 译. 雷达系统模拟[M], 北京: 科学出版社, 1985年.
[5]LEE Moonsik,KATKOVNIK V, KIM Yonghoon. System modeling and signal processing for a switch antenna array radar[J]. IEEE Transactions on Signal Processing, 2004, 52(6): 1513-1523.
[6]SKOLNIK M I著,南京電子技术研究所译. 雷达手册(第三版)[M]. 北京: 电子工业出版社, 2010年.
[7]CLARK J M C,VINTER R B,YAQOOB M M.The shifted Rayleigh filter for bearings only tracking [C].Proc. 8th International Conf. on Information Fusion, Philadelphia,PA,USA,July 2005:93-100.
[8]CLARK J M C,ROBBIATI S A,Vinter R B.The shifted Rayleigh mixture filter for bearings-only tracking of maneuvering targets[J].IEEE Trans. On Signal Processing,2007,55(7):3218-3226.
[9]MALCOLM W P,DOUCET A,ZOLLO S.Sequential Monte Carlo tracking schemes for maneuvering targets with passive ranging[C]. Proc. 5th Int. Conf. Inform. Fusion, 2002,1:482-488.
[10]BARSHALOM Y, LI X R.Estimation and Tracking: Principles,Techniques, and Software[M]. Norwood, MA: Artech House, 1993.
[11]AKASHI, KUMAMOTO H.Random sampling approach to state estimation in switching environments[J].Automatica,1977,13:429-434.
[12]CHEN R,LIU J S.Mixture Kalman filters[J].J. Roy. Statist. Soc. B, 2000,62(3):493-508.
[13]DOUCET A,GORDON N J, KRISHNAMURTHY V.Particle filter for state estimation of jump Markov linear systems[J].IEEE Trans on Signal Process, 2001(3), 49(3):613-624.
[14]FEAMHEAD P,CLIFFORD P.Online inference for hidden Markov models via particle filters[J]. J. Roy. Statist. Soc. B, 2003, 65(4):887-899.
[15]WILLIAMS J L,MAYBECK P S.Costfunctionbased Gaussian mixture reduction for target tracking[C]Proc. 6th Int. Conf. Inform. Fusion,2003, 2:1047-1054.
[16]余華,周勤,刘岚.漂移瑞利混合滤波算法及其在机动目标纯方位跟踪中的应用[J].江西师范大学学报:自然科学版,2015,39(4):399-403.
[17]余华.漂移瑞利滤波算法及其在纯方位跟踪中的应用[J].计算技术与自动化,2014,33(4):74-77.
第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7第36卷第1期2017年3月计算技术与自动化Computing Technology and AutomationVol36,No1Mar. 2 0 1 7
