单电源液压伺服放大器的研制
2017-04-27徐明天江金林华东理工大学智能传感测控研究室上海200237
徐明天, 曹 恒, 江金林, 朱 钧(华东理工大学智能传感测控研究室,上海 200237)
单电源液压伺服放大器的研制
徐明天, 曹 恒, 江金林, 朱 钧
(华东理工大学智能传感测控研究室,上海 200237)
研制了一种驱动直动式电液阀的单电源伺服放大器,该放大器具有限幅、调零、增益可调功能,同时具有可以实时监控阀芯位置的特点;根据技术指标设计了伺服放大电路,并采用Multisim软件对电路模型进行了仿真分析;制成印刷电路板,对其性能进行了测试,并与仿真结果作对比。结果表明:研制的放大器输出电流线性度好,有效幅值可调范围宽,满足技术要求。
伺服放大器; 单电源供电; 仿真; 脉宽调制; H桥电路
随着液压技术在工业领域的广泛应用,液压控制技术也在飞速发展,其中直动型电液阀由于其抗污染能力强、动态响应宽等优良特性,受到工业界的普遍重视。伺服放大器作为驱动电液阀的核心部件,其性能的好坏往往决定着电液阀的动态响应和控制精度,因此其研制具有很强的现实意义和工程使用价值。传统的伺服放大器大部分是采用双电源供电和模拟式功率放大级[1],这种放大器能耗大,发热严重,需要大体积散热装置,可靠性比较低,另外在制作负电源时,需要使用变压器或带铁芯的电感、大电容等。综合以上因素,研究一种能够单电源供电且功耗低的伺服放大器很有必要。
1 伺服放大器设计
1.1 概述
伺服放大器是一种功率放大器件,能够将小功率电压输入信号转化为大功率电流输出信号,其工作原理如图1所示。所设计放大器的供电方式有别于传统设计,采用+16 V单电源供电,对供电要求简单,选择+8 V基准电压,可以将单极信号偏置成“双极信号”。由伺服放大器的原理框图可知,放大器主体部分由前置放大级和功率放大级组成,前者对电压放大,后者由脉宽调制(PWM)驱动,是一种开关式功率放大级,优点是功耗很小。另外脉宽调制方式(PWM)信号中已经包含了一定频率的脉冲分量,所以无需再单独加入颤振信号电流去减轻伺服阀阀芯的迟滞现象[2]。

图1 伺服放大器工作原理
1.2 设计技术指标
所设计的放大器要具有良好的性能,满足输出电流精度高、线性度好、可调范围广等特点。具体技术指标如下:
(1) 控制信号为0~±10 V,便于指令元件实现控制,并采用差分方式输入,且零位可调;
(2) 位移传感器电路反馈电压输入满足3~13 V,且零位可调;
(3) 可检测位置传感器的实际位置;
(4) 功率放大级采用PWM驱动,功放采用H桥驱动芯片;
(5) 输出电流可达150 mA,增益可调且有限幅保护;
(6) 带有电流负反馈和速度校正;
(7) 放大器频宽要高于1 000 Hz,以适应高频响应;
(8) 输出电流精度小于1.5%,非线性度小于5%。
1.3 放大器电路设计
根据放大器的工作原理和技术指标设计放大器的电路,为保证电路的可靠性,采用模块化设计,尽量采用集成度高的芯片,图2所示为电路原理图。

图2 伺服放大器电路原理
控制信号模块和位置传感器反馈信号模块在电路结构上相似,均采用差分输入方式,这种输入方式有3种好处:一是可以有效地免疫外部电磁干扰,二是识别微小信号能力强,三是无须依赖虚地的稳定性。通过调节电位器R4和R37分别对两路电路进行零点补偿,可以抑制放大器的零漂影响。运放U1C构成二阶低通滤波电路,U1D构成一阶低通滤波电路,可以滤掉信号中不需要的高频信号,消除系统的高频信号干扰。
前置放大模块对控制信号和位置传感器反馈信号的综合偏差进行放大,可以通过调节电位器R40的值改变电路放大增益,以适应后续电路。运放U2D构成电压跟随器,利用其高输入阻抗、低输出阻抗特性,能够保证输入到功率放大电路的电压近似为恒压源,同时将前置级和功率级隔离开。
反向并联二极管D4和D5组成一个简易限幅模块,能够将输入到功放电路的电压限定在一定范围内,防止过大的尖峰电压损坏元器件。
功率放大模块是伺服放大器的核心,该模块的核心元件是全桥驱动器,其内部结构是H桥结构,4个性能相同的MOS管构成桥式推挽功率放大电路,图3是其结构示意图。三角波信号由内置三角波发生器生成,与运放U3B的输出进行比较后,得到PWM信号为全桥驱动器提供输入,PWM波的频率与三角波的频率相同,由电路原理图可知,信号的震荡频率为f=R62/(4R59R65C9)。当IN1为高电平,IN2为低电平时,电流由OUT1流向OUT2;当IN1为低电平,IN2为高电平时,电流由OUT2流向OUT1。控制U3B的输出大小去改变PWM波的占空比,得到不同有效值的电流输出。在功率放大电路中引入了电流负反馈环节,采样电阻R64对流过负载线圈的电流进行采样,通过运算放大器U3A进行负反馈,从而稳定输出电流。电位器R54起调零作用,确保当控制信号和位移信号均为零时,输出也为零。速度校正模块采用PD调节,对位置反馈信号超前校正,一方面改善放大器的动态性能,另一方面对系统进行及早修正,以消除系统偏差。
电压-电流转换模块是将位置反馈信号(电压)转换成4~20 mA电流输出,使用标定仪器将LVDT(差动变压器式压力传感器)的位置量与电流值进行匹配,比如12 mA对应LVDT的零位,因此可以通过采集电流值来获取LVDT实际位置量,应用中可以对位置量进行显示,便于工作人员实时观察阀芯的动作。

图3 H桥结构示意图
1.4 伺服放大器电路计算
1.4.1 信号输入的传递函数 如图2,控制信号为U1,位置传感器反馈信号为U2,由差分电路特点,R1=R10,R5=R8,R20=R30,R22=R27,控制信号电路中U3对于U1的传递函数与反馈信号电路中U4对于U2的传递函数[5]分别为
(1)
(2)
通过分析两个传递函数,选择合适的元件参数,改善信号输入的频域特性和动态响应。静态时,两路电压信号经放大运算后分别为
(3)
(4)
选择合适的电阻参数,针对不同型号的LVDT,调节可变电阻R2以保证U4的输出范围为3~13 V,以适应后续电路。
1.4.2 检测电流Iout在图2的电压-电流转换模块电路中,R11=R12+R19,R16=R28,当电路处于稳态时,由运算放大器的“虚短”和“虚断”原理[3]及基尔霍夫电流定律[4],有
(5)
(6)
(7)
(8)
(9)
(10)
解得
(11)
由式(11)可知Iout与U4成线性关系,针对不同型号的LVDT,选取合适的元件参数,即能使Iout的输出范围为4~20 mA。
1.4.3 负载线圈电流有效值IL电路中电阻R31=R35,稳态时控制信号和位置传感器反馈信号的综合偏差为
(12)
代入式(3)和式(4),得
(13)
经过前置放大和电压跟随运算后,得
(14)
由式(13)、(14)得
(15)
选择合适的电阻参数,使得UD和U5的输出范围均为3~13 V,以适应后续电路。让采样电阻R64对输出电流采样后经U3A差分运算反馈到运放U3B的反相输入端,由于反馈电压是由电流提供的,因此反馈形式为电流并联负反馈。电路中电阻R57=R69,R58=R68,R60=R63,则U3A输出为
(16)
根据基尔霍夫电流定律和负反馈特点,有
(17)
(18)
则负载线圈电流
(19)
由式(19)可以看出负载电流IL与负载RL(一定范围内)无关,且与U1和U2成线性关系,改变电位器R40的值即可改变电流的峰值。
2 伺服放大器性能分析
2.1 软件仿真分析
根据放大器的电路原理图,在NI Multisim软件里建立电路仿真模型,对所设计的电路进行理论上的仿真分析,以便优化参数。4~20 mA检测电流的扫描分析结果如图4所示,仿真过程中选定U4的范围为3~13 V。力矩马达线圈的参数定为:电阻RL=70 Ω,电感LL=1 H,偏差综合信号电压UD在3~13 V范围内变化时,负载线圈电流的扫描分析结果如图5所示,由仿真结果可知,所设计的伺服放大器输出电流表现出很好的线性特性,而且输出幅值高。图6(a)和图6(b)分别为伺服放大器在输出为±160 mA时的频响特性曲线,由仿真曲线可以看出,理论上设计的放大器响应频带宽可高达2 000 Hz左右。
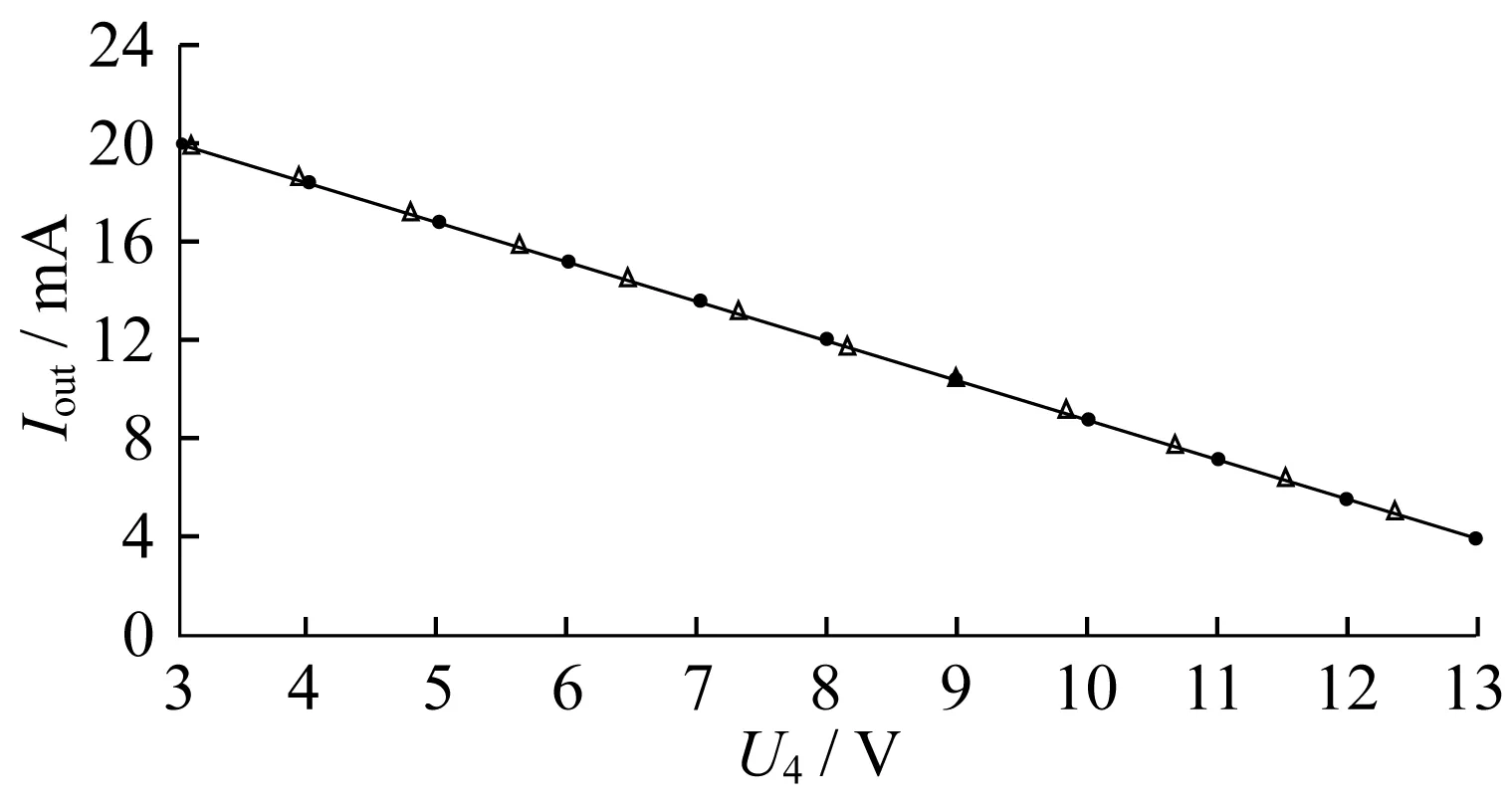
图4 U4与检测电流Iout扫描仿真结果
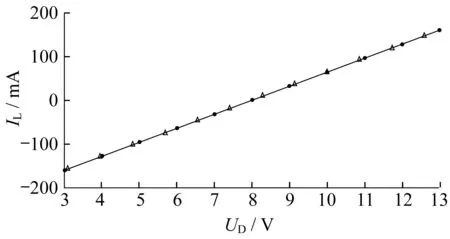
图5 UD与IL扫描仿真结果
2.2 实验分析
根据电路原理图生成PCB板,加工制成伺服放大器电路板如图7所示。
实验中,给放大器提供0~±10 V之间的电压,在伺服阀和放大器输出端之间接入电流表,通过特殊值法找出一系列电压-电流对应的特殊点,并采用Origin8.5软件对点进行曲线拟合,得到如图8所示的曲线图。由图可知,实验结果与仿真结果基本吻合。
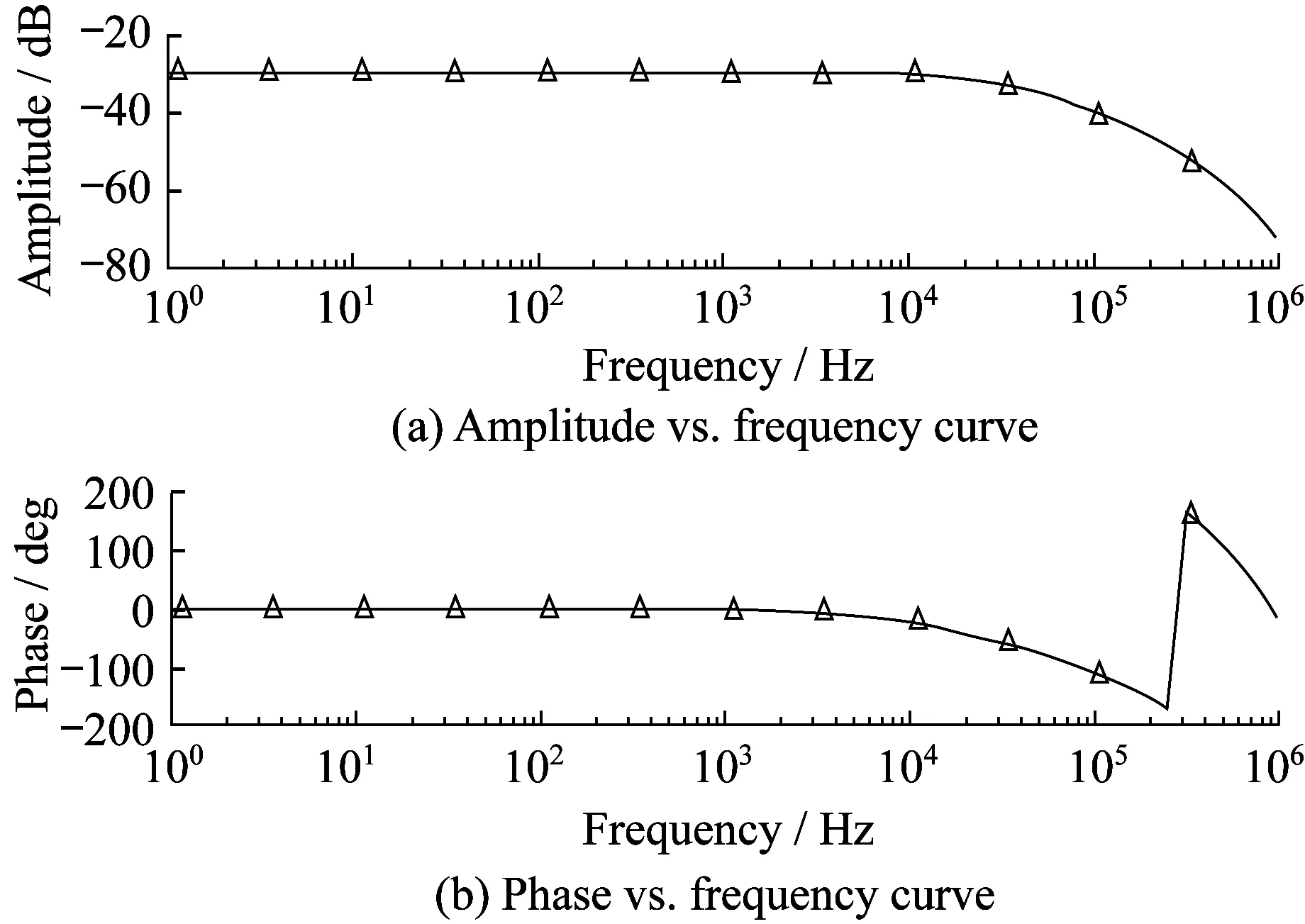
图6 频响特性曲线

图7 伺服放大器电路板

图8 伺服放大器输入电压与输出电流的关系
3 结束语
设计过程中采用Multisim软件对电路进行辅助设计和仿真,一方面缩短了研制周期,另一方面可以为设计提供理论依据,方便了电路的优化和改进。根据电路图制成PCB板,并对其进行相关性能测试,测试结果与仿真基本一致。经仿真和实验双重验证,表明单电源伺服放大器输出电流精度高,线性度好,响应频带宽,在性能上完全满足生产工作要求。
[1]卢云丹,陈新元,曾良才.基于Multisim的伺服放大器的特性分析[J].仪表技术,2007(10):43-44.
[2]黎啟柏.电液比例控制与数字控制系统[M].北京:机械工业出版社,1997.
[3]童诗白,华成英.模拟电子技术基础[M].第3版.北京:高等教育出版社,2001.
[4]秦曾煌.电子技术[M].第5版.北京:高等教育出版社,1999.
[5]周恩涛,张栋,李井杰.伺服放大器的设计及特性仿真[J].机床与液压,2006(2):113-115.
[6]言军.电液伺服/比例放大器的研究[D].杭州:浙江大学,2007.
[7]PAN X D,WANG G L,YANG H,etal.Automatic pairing measurement of servo valve nozzles and experimental research[C]//International Technology and Innovation Conference.Xi’an,China:[s.n.],2009:301-304.
[8]刘小初.三级电液伺服阀特性及其控制技术研究[D].哈尔滨:哈尔滨工业大学,2010.
[9]李其鹏.直动式电液伺服阀关键技术的研究[D].杭州:浙江大学,2005.
[10]谢小平.伺服功率放大器的设计[D].成都:电子科技大学,2006.
[11]宫文斌,刘昕晖,孙延伟.电液比例PWM控制方法[J].吉林大学学报(工学版),2003,33(3):104-105.
[12]朱玉田,唐兴华.脉宽调制中的颤振算法[J].机械工程学报,2009(4):214-218.
[13]SUEMATSU X,YAMADA H,TSUKAMOTO T.Digital control of electro-hydraulic servo system operated by differential pulse-width modulation[J].JSME International Journal Series 3,1993,36:61-68.
Development of Hydraulic Servo Amplifier with Single Supply
XU Ming-tian,CAO Heng,JIANG Jin-lin,ZHU Jun
(Intelligent Sensor Measurement and Control Laboratory,East China University of Science and Technology,Shanghai 200237,China)
In order to develop a single-supply servo amplifier driving electro-hydraulic valve,which can limit the amplitude of input voltage and output current,set zero,adjust gain,and monitor the position of valve core in real time,the amplifier circuit is designed according to technical indicators.Then the circuit model is simulated by using Multisim.PCB is manufactured and tested.Compared with the simulation results,it can be found that the developed servo amplifier meets the technical requirements,and its output current performs good linearity and wide adjustable range.
servo amplifier; single power supply; simulation; PWM; H-bridge circuit
1006-3080(2017)02-0292-05
10.14135/j.cnki.1006-3080.2017.02.022
2016-06-01
国家自然科学基金(51275170)
徐明天(1992- ),男,安徽人,硕士生,主要研究方向为伺服放大器的研究。
曹 恒,E-mail:hengcao@163.com
TH702
A
