基于立体卫星影像的等高线自动提取方案
2017-04-27袁红选左志奇胡裕军
袁红选++左志奇++胡裕军
摘 要 对一种基于立体卫星影像数据的等高线自动提取方案进行介绍,该算法能自动获取目标区域的等高线数据,且精度、可靠性以及美观程度都较优。
【关键词】等高线 提取方案
受卫星影像分辨率、DSM提取方案、等高线提取算法等因素影响,等高线的自动提取在作业生产中一直难以实用化。本文提出一种全新的等高线自动提取方案,该方案采用先进的半全局密集匹配算法,针对密集匹配提取的DSM点云,采用基于不规则三角网的平滑算法得到平滑的DEM。最后采用Global Mapper软件将DEM内插为等高线。
1 立体卫星影像DSM自动提取
采用基于半全局优化的密集匹配算法,该算法采用局部逐点匹配的思想,在待匹配像素多个方向上做动态规划,用多个一维的平滑约束来近似该像素二维的平滑约束,减少因遮挡、噪声产生的错误匹配,该算法既保留了动态规划高效的特点,同时也提高了计算结果的精度,算法中引入互信息作为相似测度,互信息较以往的相似性测度(如相关系数、灰度绝对差等)具有对亮度变化、视差初值误差不敏感、可以直接进行像素间的相关计算等优点。该算法包括匹配代价计算、代价矩阵累加、视差解算三个步骤,可得到子像素级匹配结果。
2 点云平滑算法
由立体卫星影像直接提取得到的DSM表面比较粗糙,必须进行平滑处理去掉噪声、孤立突出地物等,以便于后续的等高线提取。考虑到获取的DSM点云相对于航空影像数据较为稀疏,为了更好的保留地形特征,对获取的DSM没有采用点云滤波技术,仅仅做一次中值滤波或平滑处理。过程如下:首先,对区域的DSM点云数据构建不规则三角网,并根据三角网建立点与点之间的邻接关系,即在同一个三角形内的点属于邻接点。然后,依次遍历DSM中的每一个点,根据其周围的邻接点对其高程值进行中值滤波或高斯平滑处理。得到更新的点云数据。
3 等高线自动生成
目前公认的效果比较好的是Global Mapper软件,它可以在生成等高线的同时顾及山脊、山谷的走向,得到的等高线数据更加美观、更加合理。因此,本文采用Global Mapper軟件生成等高线,输入第二节中生成的平滑后的点云数据,采用三角网内插DEM算法得到规则格网DEM,之后再经过等高线自动提取步骤得到最终的等高线数据。
4 实验结果与分析
采用以上流程进行了实验,实验数据为经过VirtuoZoSat软件空三平差和模型裁切后得到的卫星立体影像数据,半全局密集匹配算法和点云平滑算法为本文作者根据上述原理自己编写的程序,环境为Visual C++ 6.0。等高线自动提取试验流程如下图所示,经VirtuoZoSat软件近似核线裁切得到的左右核线影像经过密集匹配技术生成匹配点云,匹配点云经过平滑后内插成DEM数据,再由Global Mapper软件进行等高线自动提取。
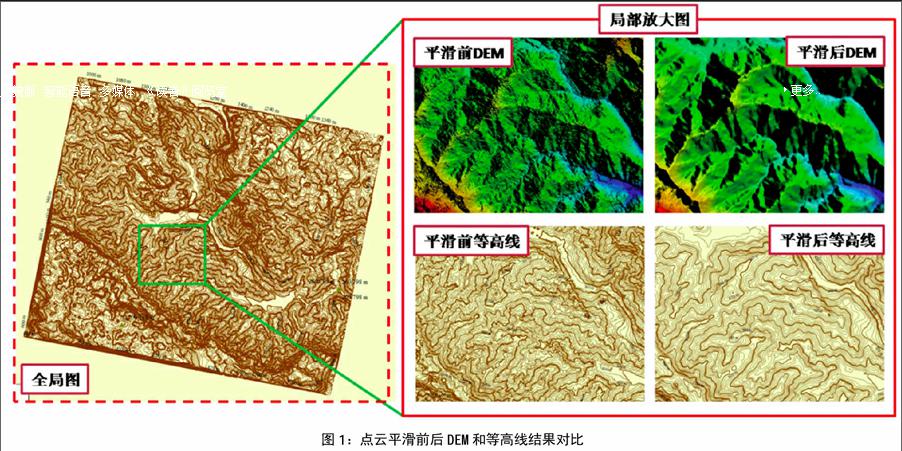
对点云数据平滑前后内插的DEM和提取的等高线数据进行了对比,如下图1所示,从结果可以看出点云平滑前内插的DEM比较粗糙,平滑后内插的DEM表面光滑度得到了明显提高,由点云平滑前内插的粗糙DEM提取的等高线比较乱,很多毛刺、不够光滑,点云平滑后内插的DEM提取的等高线毛刺大大减少,在平滑性和美观性方面大大提高。
5 结论
从实验结果可以看出,基于半全局优化的密集匹配算法都能提取出质量较高的DSM点云数据,经过平滑、内插生成规则格网DEM后内插的等高线,整体简洁、美观,立体情况下检查并少量编辑修改后可以满足生产要求。因此,本文的等高线自动提取方案可以大大提高当前等高线采集作业的效率。
作者简介
袁红选(1975-),男,湖北省武汉市人。现为61175部队工程师,从事摄影测量与遥感工作。研究方向为地理信息系统。
作者单位
61175部队 湖北省武汉市 430070
