基于飞轮储能单元的动态电压恢复器优化补偿方法研究*
2017-04-25蔡晓磊黄永红张云帅
蔡晓磊,杜 立,黄永红,施 慧,张云帅
(江苏大学电气与信息工程学院,江苏 镇江 212013)
基于飞轮储能单元的动态电压恢复器优化补偿方法研究*
蔡晓磊,杜 立,黄永红*,施 慧,张云帅
(江苏大学电气与信息工程学院,江苏 镇江 212013)
配电系统中的电能质量问题一般与电压暂降有关,针对飞轮储能装置具有效率高、功率大等特性,提出一种基于飞轮储能系统的动态电压恢复器(DVR)解决配电网电压暂降问题,建立含飞轮储能单元并联型DVR模型,重点分析并联型飞轮储能系统的工作模式及相对应的充放电控制策略。配电网中DVR模型主电路采用混合级联H桥拓扑结构,在补偿控制策略方面,提出一种优化补偿控制策略,该方法可以减少所需注入DVR的有功功率和延长系统的补偿时间。通过仿真分析与实验验证,表明了所提模型以及相关补偿控制方法可行性和有效性。
配电网;动态电压恢复器;飞轮储能;充放电控制;优化补偿控制
在现代工业的快速发展中,一些新型的电力电子装置和一些非线性、冲击性、非对称性负荷的运行可能导致电网电压升高、跌落和瞬时供电中断等动态电能质量问题,而电压暂降在诸多电能质量问题中发生频率最高,影响最为严重,造成经济损失最大[1-2]。动态电压恢复器作为一种新型电能质量补偿装置特别适合用于补偿电网中出现的电压暂降问题,DVR装置具有结构简单、装置成本低、补偿效率高等优势[3],基于其具有高性价比和良好的动态性能,DVR装置已成为目前治理电网中出现电压暂降问题最为经济、有效的手段[4]。
当系统出现电压暂降扰动时,DVR装置中的直流储能单元向暂降系统注入有功/无功功率来进行电压补偿[5]。一般而言,DVR的直流储能单元有2种结构方式:一种采用不可控整流或可控整流器件从电网侧或是用户侧的线路上直接提取能量,这种方法无法向DVR系统进行储能,有可能引起更严重的电压跌落;另一种是采用直流储能元件(如飞轮储能、蓄电池、超级电容储能、超导储能等),DVR在进行补偿工作时能量由直流储能装置提供[6]。其中,飞轮储能装置具有寿命长、快速充放电以及无污染等特性,适合短时间储能,能够有效解决电能质量和脉冲式用电问题[7]。
本文将以低速钢转子飞轮和内装式永磁无刷直流电机同轴安装结合一起用于DVR系统储能单元,建立含飞轮储能单元并联型系统拓扑结构的DVR模型。DVR模型主电路采用混合级联H桥多电平逆变器拓扑结构,在补偿控制策略方面,提出了一种改进的优化补偿控制策略[8],该方法能够进一步减少DVR装置直流储能单元的容量,降低DVR注入电压振幅和减轻负载侧瞬态失真,更有效延长DVR补偿时间;本文还将重点分析并联型飞轮储能系统的工作模式及相对应的充放电控制策略,并通过建模仿真与实验结果验证该控制方法的正确性和有效性。
1 含飞轮储能单元并联型DVR结构
1.1 飞轮储能电机的结构原理
飞轮储能电机主要由储存能量用的飞轮转子、支撑转子的永磁轴承、进行机电能量转化的电动/发电机和进行电能变换与传输控制的电能转换系统4个部分组成,其基本结构如图1所示。

图1 飞轮储能电机基本构成图
飞轮电机绕飞轮对称轴旋转进行机电能量转换的总储能为:
(1)
式中:J为飞轮极转到惯量;ωmax和ωmin分别为飞轮的最高转速和最低转速;m为飞轮质量;Ks为飞轮形状系数;Km为飞轮材料利用系数;σB为材料利用应力;ρ为材料密度;R为飞轮外径。一般采用高强度、低密度的材料来提高飞轮电机的储能密度。
1.2 含飞轮储能单元的并联DVR基本结构
本文提出的含飞轮储能单元的并联型DVR基本结构如图2所示,与传统拓扑结构相比,通过引入转换开关k4、k5、k6省去了辅助变换器。其中k1、k2、k3为旁路开关,与飞轮同轴安装的永磁无刷直流电机通过2个电压型变换器A和B,经串联变压器接入配电网。

图2 含飞轮的 DVR 并联型拓扑结构
DVR系统启动初期,这时候飞轮储能系统处于充电状态。通过控制系统电源电压和敏感负荷侧电压之间的相角差,变流器B起整流作用,将系统电源的能量转换到飞轮储能系统的直流母线侧,而变换器A起逆变作用,将从变换器B出来直流电经过PWM变为频率可变或电压大小也可变的交流电,提供一个较高的转矩带动电机飞轮高速旋转,这时电机工作在电动状态对飞轮系统进行充电。待其充满能量后,DVR系统进入待机模式,这时候旁路开关k1、k2、k3闭合直接将DVR系统旁路,以减少串联变压器的损耗。此时,系统电源直接向敏感负载供电。当DVR检测到系统电压发生电压跌落时,旁路开关k1、k2、k3通过继电器模式迅速打开,此时飞轮储能系统工作于放电状态。这时飞轮电机工作在发电状态,PWM变换器B起整流作用,将发出的交流电整流为直流电,PWM变换器A起逆变作用,采用电压优化补偿方法控制飞轮减速放电,补偿敏感负载所需功率,保证其不受影响并正常运行。
2 优化补偿控制策略
对于各种形式不同的电压暂降,DVR必须很快做出回应并迅速恢复暂降后系统电压幅值。当系统出现不平衡、长电压暂降时,DVR装置能够给出正确的补偿,避免大多数负载较大的相位跳变。由于一般DVR系统直流环节存在放电和负载侧的电压失真,所以为了确保负载的低失真以及敏感负荷侧不能够承受较大的相位跳变,本文提出一种改进的优化补偿控制策略,该方法较传统补偿控制策略而言,能够及时准确地补偿系统在发生电能质量扰动时所需的电压和产生最小的负载电压瞬态失真,而且能够减少DVR注入有功功率,节约飞轮电机的储能容量,延长补偿时间。优化补偿控制过程的系统相量图如图3所示。

图3 优化补偿控制系统向量图

图5 优化控制策略方框图
图3中,UG1、UG2、UGn为补偿期间电网电压,UL1、UL2、ULn为补偿后负载电压,UD1、UD2、UDn为DVR的补偿电压,US为暂降前的电网电压。IL为暂降前的负载电流,IGn为系统经过补偿后的电网电流,IL1、ILn为补偿后的负载电流,φ为暂降系统的功率因素角,δ为暂降前后系统电网电压之间的夹角。暂降发生后DVR向系统注入的有功功率和无功功率分别为:
PDVR=UD1IL1cosω1+UD2IL2cosω2+…+UDnILncosωn
(2)
QDVR=UD1IL1sinω1+UD2IL2sinω2+…+UDnILnsinωn
(3)
式中:由优化补偿控制系统向量图可知,补偿后系统的功率因素角ωn=φ,且由系统锁相环的缓慢调制过程知,每一次系统缓慢调制后的功率因素角之差的累加等于暂降前后系统电网电压之间的夹角,即:
(4)
当电网电压发生短时间暂降时,DVR输出电压使负载电压的相位在补偿开始时与暂降前保持一致,然后慢慢过渡到与暂降后电压一致,而优化补偿在调制补偿过程中始终保持负载电压幅值与暂降前电压一致。对于长电压骤降时,当直流电压一定或没有过调制的情况下,该方法仍然可以产生适当的电压和最小的负载电压瞬态畸变。其补偿控制流程图如图4所示。

图4 优化补偿控制流程图
图5为DVR系统的优化控制策略方框图。为了降低电网电压的瞬态失真,将50 Hz的带通滤波器应用到p-q-r参考框架改造之前,这时需要一个参考电压VREF来应对这种转变。当DVR装置检测到暂降电压后,系统中的锁相环立即被解冻,补偿电压与电网电压之间的相位角通过锁相环被控制且存储起来。为了补偿不可避免的延迟时间,最后的几个测量的相位角也被存储起来,而且其中的1个测量值通过依靠跌落检测的数量样本来产生参考电压。一旦中压系统中的直流母线电压降到给定值以下,这时完全补偿策略将会改变,锁相环解锁并开始跟踪电网电压,调整DVR输出的补偿电压使负载电压的频率开始有一个很小的跳变,经过一定的过渡时间,最终将补偿电压缓慢过渡到与电网电压同相。其中,锁相环本身是用一个控制器来实现的,而自相电压差总是导致Q分量在p-q-r参考框架下,控制器只需要消除这种成分,又由于补偿的时间常数较高,当改变策略启动时,锁相环需要几个周期时间来进行与电网电压同步。
3 DVR 中飞轮储能单元的充放电控制
3.1 充电过程分析
飞轮电机启动后,飞轮以角速度ω快速旋转加速,直到我们所需的转速,充电过程结束,系统转入恒速待机状态。因此其充电过程其实就是电机的一个启动加速过程,而一般在中小功率场合,驱动飞轮用电机一般采用永磁直流电机,与飞轮做成一体。其数学模型分析如下:假设三相定子绕组采用星型接法且中性点无中线,每相绕组特性和参数相同且为常数,由状态空间法可以推导出电压平衡方程[9]:
(5)
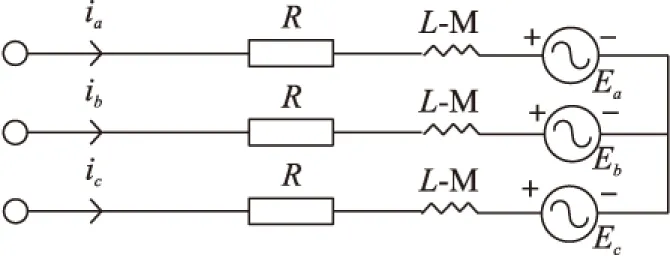
图6 永磁无刷直流电机的等效电路
式中:Ua、Ub、Uc为定子绕组电压,R为定子电阻,ia、ib、ic为定子绕组电流,L、M为绕组的自感和互感,Ea、Eb、Ec为各相绕组反电动势。由电压平衡方程式可以得到图6所示的永磁无刷直流电机的等效电路。
以a相为例,当电机以角速度ω旋转时,单相电磁转矩Ta可表示为:
Ta=Eaia/ω
(6)
电机总电磁转矩Te为三相转矩之和,为:
Te=(Eaia+Ebib+Ecic)/ω
(7)
电机工作在动机模式时,逆变器控制电枢交轴电流iq与电机反电势同流向,电机相电压Ua相位上超前反电势,幅值大于反电电势幅值。在基速以下,定子交轴电压Uq大于电机反电动势,交轴电流iq由高电势流进,从低电势流出,电机吸收电能转化为转子的机械能,带动飞轮完成充电储能过程。
3.2 放电过程分析
在放电过程中,永磁无刷直流电机工作于发电机状态,随着机械能到电能的转换,电机的速度逐渐下降,电机端电压逐渐下降,同时为了稳定输出电压,放电过程采用闭环控制的Boost升压电路。如图7为Boost升压电路中直流升压器的电路拓扑结构[10],通过控制功率开关管T的导通与关断时间来调节输出电压。电路工作原理是:当VG为高电平时,功率开关管T导通,在输入电压Vd的作用下,电感上的电压VL=Vd>0,iL上升,电感储能增加,负载R由电容C提供电能。反之VG为低电平时,功率开关管T关断,因电感电流不能突变,iL开始下降,并通过二极管VD向电容C与负载供电,电感上储存的能量传递到电容、负载侧,此时输出电压Vo=Vd-VL>0。

图7 直流升压变换器电路图
此时电机工作在发电机模式,逆变器控制电枢交轴电流iq与电机反电势反向,定子电电机相电压 Ua的相位滞后于反电势,幅值小于反电势。定子交轴电流iq从高电势流出,流进低电势。电机将飞轮转子的机械能转化为电功率输出。
4 仿真分析与实验验证
4.1 仿真分析
为了验证上述DVR装置的可行性以及优化补偿控制策略实效性,本文基于MATLAB/Simulink软件,对飞轮储能单元的充电加速过程、恒速待机过程以及配电网发生电压暂降后飞轮储能单元的放电减速过程进行仿真,系统主要参数如表1所示。
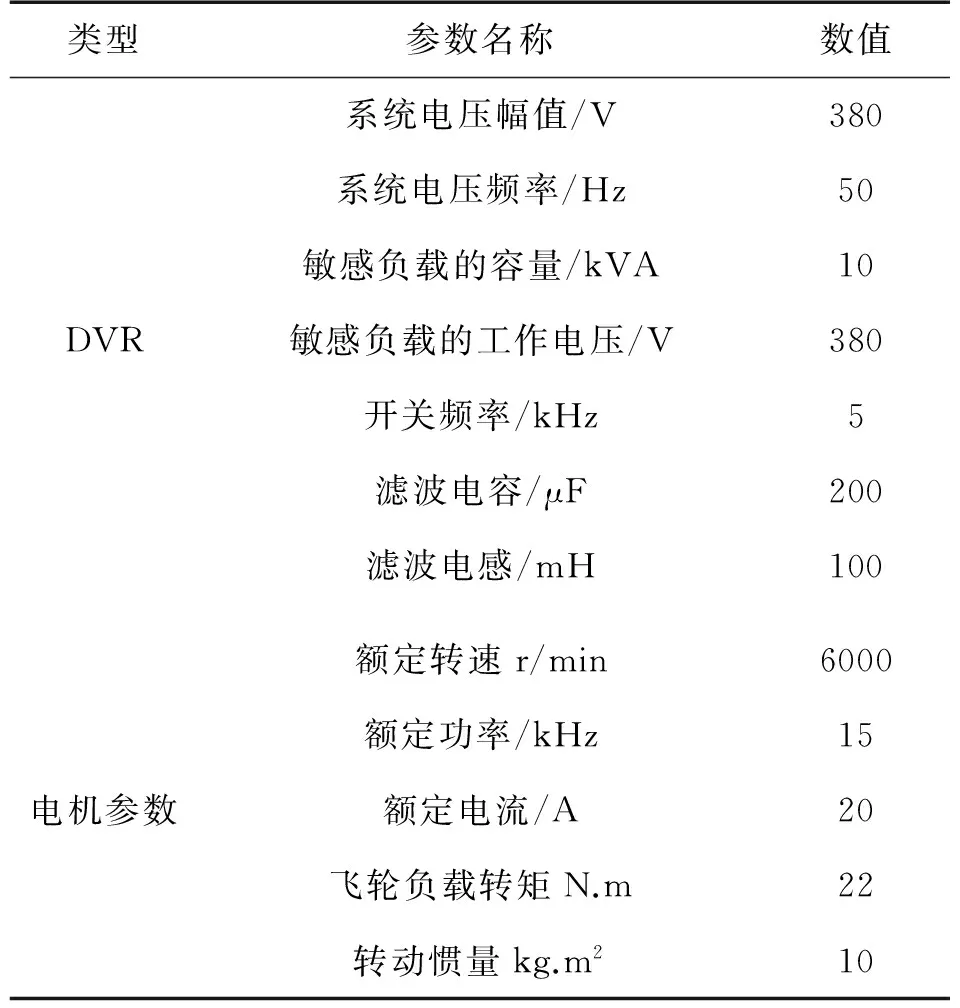
表1 系统主要参数
图8为2种不同情况下出现的电压暂降,图8(a)系统接入非线性负荷时出现的电压暂降,暂降幅度约33%,持续时间为1 s;图8(b)是线路故障时的电压暂降,几乎降为零,持续时间为1 s。

图8 2种不同情况的电压暂降
DVR系统启动后,储能单元进入充电模式,电机采用恒转矩加速方式,电机始终控制在最大转矩下,随时为暂降系统进行电压补偿。图9给出了加速充电过程中电机转速、电磁转矩的变化情况。飞轮的加速时间为5.5 s,电机转矩在启动瞬间出现波动,之后加速一直保持最大转矩22 N/m,充电完毕后,电机转矩迅速减小,只以较小的值维持飞轮稳定运行,飞轮转速保持在4 250 r/min。
当配电网接入非线性负荷时,在设定的仿真环境下出现图7(a)所示的三相对称电压暂降波形,此时飞轮储能单元开始降速放电,飞轮转速由4 250 r/min降至1 000 r/min,图10给出了放电过程中电机转子转速的变化过程。图11波形为DVR切入暂降系统后补偿效果。

图9 飞轮电机的转速、转矩响应曲线

图10 放电时飞轮电机的转速响应曲线

图11 带DVR时敏感负载的三相电压

图12 优化补偿控制的DVR输出电压波形图
为负载补偿同相位电压,采用本文所提的优化补偿控制策略,如图12所示,DVR系统稳定的为直流负载端补偿200 V左右电压,而且延长了大约0.02 s补偿时间。图13为传统补偿控制策略和本文采用的优化补偿控制策略下DVR消耗的有功功率比较图。由图可以看出,本文所采用的优化补偿控制策略在补偿暂降电压时损耗的有功功率要小于传统补偿控制策略。

图13 传统补偿与优化补偿控制策略DVR消耗有功功率比较
4.2 实验验证
为了进一步探究本文所提的优化补偿控制策略在暂态电能质量补偿方面的实用性,搭建了含飞轮储能电机的DVR电压暂降补偿实验平台。如图14所示,实验时采用Chroma 61603可编程交流电源模拟系统电压,飞轮电机为刚转子永磁无刷直流电机,设电源电压幅值设置为380 V,基波频率为50 Hz,1个周期采样时间设置为20 ms,共10个采样周期,设定电压暂降幅值深度为50%,暂降时间为4个周期。

图14 电压暂降补偿实验平台
实验中非线性负载由电阻、电感和整流桥组合而成,主控电路由FPGA芯片EP2C5T144C8N和ARM7微处理器LPC2136构成,同步调理电路由FPGA接收主要完成系统电压同步方波信号的调理与输出。当检测到系统电压发生暂降时,这时FPGA中的计算环节能够快速地计算出电压暂降的幅值,并根据所提的补偿控制策略实时跟踪与调整电网电压,从而保证负载正常供电。对DVR实验样机进行电压暂降检测与补偿实验,图15(a)、图15(b)、图15(c)分别为系统电压发生暂降检测波形,DVR装置补偿电压波形,补偿后系统电压波形,对比图形证明了该补偿控制方法的有效性及可行性。

图15 优化补偿方法动态电压恢复器实验波形
5 结论
基于飞轮储能装置具有短时间、高功率放电的特性,本文用一种含飞轮储能系统的动态电压恢复器解决配电网电压暂降问题,建立含飞轮储能单元并联型系统拓扑结构的DVR模型,在逆变器的补偿控制策略方面,提出了一种改进的优化补偿控制策略并用于暂降系统的检测补偿分析中,得出如下结论:
(1)确定了飞轮储能系统的充、放电主回路的电路拓扑;介绍了飞轮电机的数学模型,基于飞轮储能系统的充放电控制策略能实现电能与飞轮转子机械能之间的有效转换,并保证飞轮储能系统在放电状态下输出恒定功率;
(2)提出了一种改进的优化补偿控制策略,该方法较传统补偿控制策略而言,能够及时准确地补偿系统在发生电能质量扰动时所需的电压和产生最小的负载电压瞬态失真,而且能够减少DVR注入有功功率,节约飞轮电机的储能容量,延长补偿时间;
(3)搭建了含飞轮储能电机的DVR电压暂降补偿实验平台,进行了电压暂降补偿实验,实验结果验证了所提DVR模型和相关补偿控制方法的可行性与有效性。
[1] 林海雪. 现代电能质量的基本问题[J]. 电网技术,2001,25(10):5-12.
[2] 陈国栋. 动态电压恢复器电压跌落检测算法与控制技术综述[J]. 电气工程学报,2015,10(5):21-31.
[3] Conrad L E,Bollen M H J. Voltage Sag Coordination for Reliable Plant Operation[J]. IEEE Trans on Industrial Application,1997,33:1459-1464.
[4] 雷宪章,Retzmann D,Weinhold M. 利用电能质量调节器改善配电网络的电能质量[J]. 电网技术,2000,24(8):8-12.
[5] 徐俊俊. 级联多电平动态电压恢复器的补偿与控制策略研究[D]. 镇江:江苏大学,2015.
[6] 朱俊星,李金元. 基于飞轮储能系统的动态电压恢复器[J]. 供用电,2010,27(2):13-16.
[7] Bitterly J G. Flywheel Technology:Past,Present,and 21st Century Projections[J]. IEEE Aerospace and Electronic System Magazine,1998,13(8):13-16.
[8] Christoph Meyer,E,Rik W De Doncker,et al. Optimized Control Strategy for a Medium-Voltage DVR-Theoretical Investigations and Experimental Results[J]. IEEE Trans on Power Electronics,2008,23(6):2746-2754.
[9] 林平,韦鲲,张仲. 新型无刷直流电机换相转矩脉动的抑制控制方法[J]. 中国电机工程学报,2006,26(3):153-158.
[10] 李保军. 飞轮储能系统电机设计与充放电控制仿真研究[D]. 上海,上海交通大学,2013.
[11] Meng Yongmin,Li Tiecai,Wang Li. Simulation of Controlling Methods to Flywheel Energy Storage on Charge Section[C]//The Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies,Nanjing,2008.
[12] Ajaei F B,Afsharnia S,Kahrobaeian A,et al. A Fast And Effective Control Scheme for the Dynamic Voltage Restorer[J]. IEEE Trans on Power Delivery,2011,26(4):2398-2406.
[13] 冯晓华,陈劲操,沈书林,等. 混合级联多电平逆变器在DVR中的应用研究[J]. 电力电子技术,2013,47(2):92-94.
[14] Marei M I,Eltantawy A B,EI-Sattar A A. An Energy Optimized Control Scheme for a Transformer DVR[J]. Electric Power System Research,2012,83(1):110-118.
Research on Optimization of Dynamic Voltage Restorer Compensation Method Based on Flywheel Energy Storage Unit*
CAIXiaolei,DULi,HUANGYonghong*,SHIHui,ZHANGYunshuai
(School of Electrical and Information Engineering,Jiangsu University,Zhenjiang Jiangsu 212013,China)
Most power quality problems in distribution systems are related to voltage sags. For the flywheel energy storage device with high efficiency and high power characteristics,a flywheel energy storage system for dynamic voltage restorer(DVR)based on solving distribution network voltage sags were built with flywheel energy units in parallel type model of the DVR,in order to focuse analysis of parallel type flywheel storage system working mode and corresponding to the charge and discharge control strategy. Distribution network model of the DVR main circuit adopts hybrid cascaded H-bridge topology,and puts forward a optimal compensation control strategy in the compensation control strategy. This method can reduce the DVR injection active power and extend the system to compensate the time. Through the simulation analysis and experimental verification,the feasibility and effectiveness of the proposed model and the related compensation control method are demonstrated.
distribution network;dynamic voltage restorer;flywheel energy storage;charge discharge control;optimal compensation control
项目来源:江苏省工业支撑计划项目(BE2014876)
2016-03-18 修改日期:2016-05-07
C:8470
10.3969/j.issn.1005-9490.2017.02.036
TM712
A
1005-9490(2017)02-0439-07
