采用Y/△变换扩大永磁同步电动机恒转矩调速范围的矢量控制系统研究
2017-04-20,,
,,
(福州大学电气工程与自动化学院,福建 福州 350116)
1 引言
在永磁同步电动机(PMSM)交流调速系统中,当电机运行于额定点(额定转速、额定转矩)时,定子电压受母线电压的限制不能继续提高,若要继续提升电机的转速,就需要进行弱磁调速,但弱磁调速是以牺牲转矩来获得转速增加的,其无法满足在高速时仍需要大转矩的负载。如果在额定点以后,可以继续提升电机的定子电压,就可以在保证输出转矩不减小的前提下,增加电机转速,实现恒转矩区的拓宽。针对此问题,文献[1-2]提出了高速PHM调制技术,利用过调制技术,可以提高逆变器直流母线电压利用率,进而可以提高定子侧电压极限,扩大电机的恒转矩区,但PHM电压含有较大的高次谐波成分,导致电机损耗增加。文献[3-4]采用Z源变换器,明显提高了母线电压,但也大大增加了系统体积与成本,电流控制也比较复杂。文献[5]针对开绕组永磁同步电动机采用双逆变器的拓扑结构,其实质上也是通过增大电机的定子电压来实现扩速,但双逆变器技术控制复杂,且成本较高。
本文针对以上问题提出了Y/△变换技术。Y/△变换技术现已被广泛应用于异步电机的软启动、轻载节能等方面,然而将Y/△变换技术应用于扩展PMSM的恒转矩区有更大意义。本文分析了在id=0的永磁同步电机矢量控制下,Y/△变换实现恒转矩区扩展的原理;给出了Y/△变换矢量控制系统框图;仿真和实验都验证了本文提出的主要论点:采用Y/△变换可以明显地扩大永磁同步电动机的恒转矩区。
2 永磁同步电动机Y/△变换矢量控制系统
2.1 开绕组永磁同步电动机数学模型
PMSM的Y/△变换需将Y型接法的PMSM内部中性点打开,定子侧引出六个接线,即为开绕组永磁同步电动机,开绕组永磁同步电动机可以根据需要接成Y型、△型,内部接线和电磁关系没有改变,其dq轴数学模型与传统的Y型连接的永磁同步电动机大致相同(均采用恒磁链变换)。
磁链方程为:
(1)
电压方程为:
(2)
转矩方程为:
(3)
运动方程:
(4)
式中,Ld、Lq分别为电机绕组d轴电感、q轴电感:id、iq分别为电机绕组的d轴电流、q轴电流;Ψd、Ψq为电机的d轴磁链、q轴磁链;ud、uq为电机绕组的d轴电压、q轴电压;ω为转子电角速度;RS是绕组相电阻;Ψf为永磁磁链;Te为电磁转矩;B为电机旋转阻力系数 ;J为转动惯量;TL为电机负载转矩。
2.2 Y/△变换扩大恒转矩区的数学原理
PMSM矢量控制系统一般由电压型逆变器驱动,因此电机运行受到三方面的制约:直流母线电压限制SVPWM线性调制区的范围;逆变器电流极限限制其输出电流的能力;电机的最大温升限制了其最大输出电流。一般因为逆变器容量较大,系统只受到直流母线电压和电机极限输入电流的限制,根据这两个条件可以写出电压极限圆方程[6]:
(Lqiq+ψf)2+(Ldid)2=(ulim/ω)2
(5)
电流极限圆方程:
(6)
永磁同步电机的电压相量方程:
(7)

(8)
控制对象为隐极式永磁同步电动机时,id=0的控制策略即为最大转矩电流比(MTPA)的控制策略,由公式(3)可得:
(9)
电机带额定负载时,其q轴电流iq恒定,此时又id=0,Ld、Lq、Ψf近似为常数,由公式(5)可以得到结论:电机带额定负载时,ω∝ulim,即随着转速的升高,电机电压也在升高,当电机转速到达基速,且带额定负载时,电机电压到达极限,即ulim限制着电机带额定负载时的转速。

图1 Y接和△接时空间矢量合成与扇区划分
其中Y接的电压极限为(即图1a内接圆半径):
(10)
ulim=Udc
(11)
图2所示,为Y/△变换扩大PMSM恒转矩调速范围系统框图,采用转速外环、电流内环的双环控制方式,采取id=0的控制方式,由Clarke变换及其逆变换、Park变换及其逆变换、外加Park变换及其逆变换(可以保持Y/△变换前后电流电压相位幅值不变)、SVPWM、电机转速计算、电流采样及Y/△切换等几个环节组成。

图2 Y/△变换扩大PMSM恒转矩调速范围系统框图
3 系统仿真分析
Matlab/Simulink模型库里面的永磁同步电动机为Y型接法,无法接为△型,故搭建了开绕组永磁同步电机的Simulink仿真模型[7]。并且构建了采用Y/△变换的永磁同步电动机矢量控制仿真模型,模型结构如图2所示。永磁同步电动机参数如下:相电感3.4mH,相电阻1.18Ω,极对数4,转动惯量0.00082kg·m2。仿真环境参数如下:电机空载启动给定速度2000r/min,在0.05s时加4N·m的负载,在0.14s进行Y/△变换,变换时间20ms,在0.16s时变换完成,在0.2s时,卸去负载,并且加速至3500r/min,在0.25s时再次施加4N·m的负载,直到仿真结束。仿真时间0~0.35s,仿真算法选择ode45,误差容量1e-6,最大仿真步长1e-6。仿真结果如图3所示。
由图3仿真图可以看出在带相同负载时,Y/△变换前后,在低速区(2000r/min)和高速区(2000r/min以上)稳定运行时的相电流幅值基本相同,Y/△变换过程中转速降落为79r/min,Y/△变换拓宽了永磁同步电机的恒转矩调速范围。
4 实验结果分析
本文搭建了以TMS320F2812为核心控制器的实验平台,选用智能功率模块PM25RLA120构建逆变器,选用CJX2-3210交流接触器实现Y/△变换,将一台隐极式伺服永磁同步电机的三相绕组六个端子全部引出,通过Y/△变换电路连接到逆变器输出端。采用了id=0的矢量控制方式。其参数为:额定转速2500r/min,额定转矩4N·m,额定功率1.1kW。负载为一台同步测功机,其最高转速3000r/min。由于受负载最高转速限制,实验时将Y/△切换速度定为2000r/min,并相应地降低直流母线电压以使2000r/min转速下的iq电流环输出uq占空比不超过饱和值。切换后恒转矩转速达到3200r/min,此时iq电流环输出的uq占空比仍有很大余量,若不受负载最高转速限制可以升速至3500r/min。实验过程中电机带额定恒转矩负载。

图3 Matlab/Simulink仿真波形
在低速区(2000r/min以下)电机采用Y型接法,在高速区(2000r/min以上)电机采用△型接法。为了保证切换可靠进行,装置各部分需要协调动作。当电机为Y型接法(SWFLAG=1)且给定转速与实际转速均大于2000r/min时进行Y/△正变换;当电机为△型接法(SWFLAG=0)且给定转速与实际转速均小于2000r/min时,进行Y/△逆变换。切换过程的逻辑顺序为:先禁止逆变器输出,待电机线电流降到零,按照先断开后接通的原则发出绕组Y/△正或反变换指令,并改变输出电压控制参量(调制度M)。使用接触器的辅助常开触点信号作为接触器通断的标志,当DSP检测到触点闭合时,表明切换完成,再开通逆变器输出,并改变SWFLAG逻辑值,变换完成。其控制流程如图4所示。
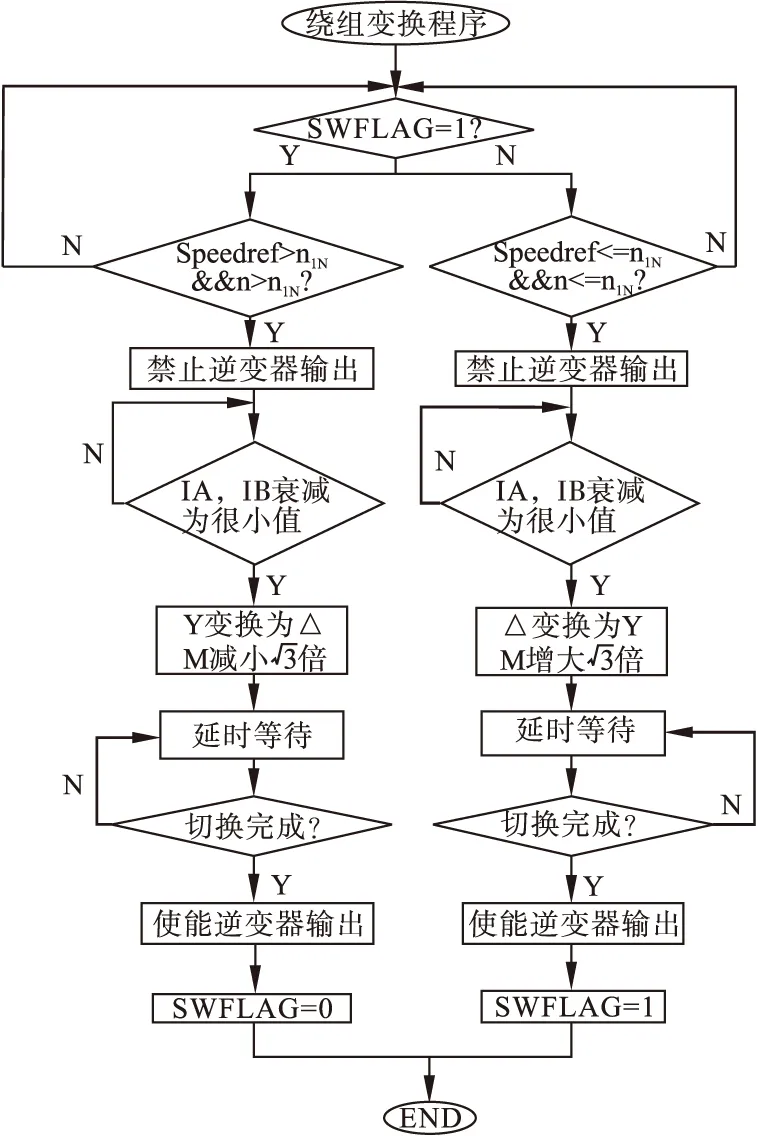
图4 Y/△变换控制流程图
无论是正变换还是逆变换时,要保证变换前后电机相电流幅值不变,即可保证切换前后电机转矩不变,亦可避免过大的切换暂态过电流烧坏功率器件。切换前后相电流不变可以由此实现:在变换过程中,转速环PI、电流环PI皆禁止调用。理由如下:禁止调用PI可以保持PI输出在切换前后不变,可以使切换前后瞬间加在电机两端的相电压不变。由于切换在一个很小的转速差内完成(即1998r/min时由Y型切换至△型接法的2002r/min),故电机的反电动势可视为不变,且都是带满载,负载不变,故由公式(7)可得,切换前后电机的相电流不变。
图5表示的是在负载转矩为4N·m恒值时,在不同转速不同定子连接形式下的线电流线电压稳态波形。

图5 稳态电流波形


图6 Y/△变换过程暂态线电压、线电流波形
5 结论

[1]梁振鸿,温旭辉.应用过调制技术扩展永磁同步电机运行区域[J].电工电能新技术,2003(1):41-44.
[2]日本日立公司电机驱动部门新技术研发报告[EB/OL].http://www.hitachi.com/rev/field/devices_materials/__icsFiles/afieldfile/2011/02/24/r2011_01_108.pdf
[3]刘平.电动汽车双向准Z源逆变器系统及控制研究:[D].重庆:重庆大学,2013.
[4]Peng F Z.Z-source inverter [J].IEEE Transactions on Industry Applications,2003,39(2):504-510.
[5]安群涛,姚飞,孙立志,孙力.双逆变器SVPWM调制策略及零序电压抑制方法[J].中国电机工程学报,2016,04:1042-1049.
[6]唐任远,等.现代永磁电机[M].北京:机械工业出版社:唐任远,1997:234-270
[7]黄守道,邓建国,罗德荣.电机瞬态过程分析的Matlab建模与仿真[M].北京:电子工业出版社:黄守道,2013.
