泵浦激光频率波动对核磁共振陀螺仪零偏稳定性的影响研究
2017-04-20周维洋王学锋邓意成刘院省北京航天控制仪器研究所北京100039
周维洋王学锋邓意成刘院省(北京航天控制仪器研究所北京100039)
泵浦激光频率波动对核磁共振陀螺仪零偏稳定性的影响研究
周维洋,王学锋,邓意成,刘院省
(北京航天控制仪器研究所,北京100039)
本文研究了泵浦激光频率波动对核磁共振陀螺仪零偏稳定性的影响。通过分析核磁共振陀螺仪理论模型和自旋光泵浦极化129Xe的过程,阐述泵浦激光频率波动对陀螺仪零偏稳定性的影响机理。结果表明,泵浦光频率波动会导致核磁共振陀螺仪零偏稳定性下降约3个数量级。泵浦光频率波动是制约核磁共振陀螺仪性能提升的重要因素。
核磁共振陀螺仪;泵浦激光;频率波动;零偏稳定性
0 引言
陀螺仪是惯性导航系统的核心器件。陀螺仪性能直接影响惯性导航系统的导航精度[1]。陀螺仪的发展经历了以Newton力学为基础的机械转子式陀螺仪、以光波Sagnac效应为基础的光学陀螺仪和以微机电技术为制造手段的MEMS陀螺仪。近年来,随着原子操控技术的飞速进步,出现了以原子干涉/自旋效应为基础的原子陀螺仪。依据工作原理,原子陀螺仪分为原子自旋陀螺仪和原子干涉陀螺仪两类。核磁共振陀螺仪是一种成熟度较高的原子自旋陀螺仪,利用原子核自旋磁矩在静磁场中进动频率的不变性敏感载体转动信息,具有高精度、小体积、大动态、低功耗等显著优势[2⁃3]。在美国DARPA资助下,诺斯罗普·格鲁曼公司已经研制成功表头体积5cm3、零偏稳定性0.01(°)/h的导航级核磁共振陀螺仪工程样机[4⁃5],有望满足微纳卫星、无人机、自动驾驶汽车等装备对高精度微型惯性器件的需求,在军事和民用领域具有广阔的应用前景。
在核磁共振陀螺仪中,泵浦激光用于制备宏观核自旋磁矩,探测光用于测量宏观核自旋磁矩的进动频率,进而获取载体转动信息[6]。泵浦激光器自由运转模式下,频率随时间波动,直接导致碱金属极化率发生改变,宏观核自旋磁矩无法保持稳定,对陀螺仪的零偏稳定性产生很大的影响。针对上述问题,本文研究了泵浦激光频率波动影响核磁共振陀螺仪零偏稳定性的理论模型。结果表明:泵浦光频率漂移直接导致核磁共振陀螺仪零偏稳定性发生数量级的改变,抑制泵浦光频率漂移是提高核磁共振陀螺仪零偏稳定性的重要途径。
1 核磁共振陀螺仪理论模型
1.1 工作原理
核磁共振陀螺仪的工作介质主要包括碱金属87Rb和惰性气体129Xe。129Xe原子质量大,弛豫时间长,进动频率低,用于敏感载体转动信息。87Rb原子最外层只有一个电子,易于极化,用于极化29Xe原子并测量29Xe原子的进动磁场。采用激光极化87Rb原子,并利用自旋弛豫交换的方式将87Rb原子的极化传递给惰性气体原子,实现129Xe宏观核极化磁矩的制备。
图1示出了核磁共振陀螺仪工作原理。通过外加泵浦激光和静磁场B0,极化碱金属原子87Rb;在缓冲气体N2的参与下129Xe原子通过自旋交换间接被极化,产生宏观极化磁矩M;通过外加驱动磁场,使得宏观核极化磁矩M围绕静磁场B0作Lamor进动。当载体以角速度ωR转动时,M的进动频率为:
其中,γ为129Xe原子的旋磁比。通过探测宏观极化磁矩的进动角频率ωL可获得载体的转动信息。
1.2 陀螺仪理论模型
描述原子自旋陀螺仪动力学模型的是Bloch方程[7],129Xe的动力学演化方程为:
其中,M是129Xe的宏观核极化磁矩。考虑核自旋磁矩的弛豫效应并且载体以角速度ωR转动时,129Xe动力学演化方程的矩阵形式为:
其中,Mx、My、Mz分别为三轴方向的磁矩分量,T1和T2分别为129Xe核极化磁矩的横向和纵向弛豫时间。在z轴方向施加静磁场Bz=B0,核自旋绕着z轴进动。为了保持进动的稳定性,在x轴方向加驱动磁场Bx=2B1cosωat,调节ωa=γBz使陀螺仪达到共振状态。驱动磁场可以分解为两个旋转磁场的叠加,一个沿顺时针方向 {Bx=B1cosωat,By=-B1sinωat},另一个沿逆时针方向{Bx=B1cosωat,By=B1sinωat}。采用旋转坐标法求解式(3),得到:
利用沿x轴的探测激光测量x轴的磁矩Mx,将Mx和Bx进行相敏检波可得到陀螺仪的输出:
核磁共振陀螺仪的输出与载体输入角速度呈色散关系。当气室温度稳定和磁场恒定时,T1和T2可近似为常值。从式(5)可以看出,影响核磁共振陀螺仪零偏稳定性的主要因素是宏观核极化磁矩强度。
2 泵浦激光频率对宏观核极化磁矩的影响
2.1 自旋交换光泵浦极化129Xe
自旋交换光泵浦是指利用激光泵浦的方法[8],使碱金属原子87Rb的核外价电子获得高度极化。在N2分子的参与下,87Rb原子与129Xe原子形成范德瓦尔斯分子,该分子解体后,87Rb原子的电子自旋与129Xe原子的核自旋进行交换。特定时间(通常为87Rb和129Xe的自旋交换弛豫时间)后,体系达到平衡,129Xe原子获得稳定的宏观核自旋磁矩。图2给出的漏桶(Leaky Bucket)模型可以直观描述自旋交换光泵浦的过程。129Xe的宏观核极化磁矩可表述为:
其中,μXe是129Xe的波尔磁子,是原子的固有属性;NXe是核子总数,与气室内的气压和温度有关;PXe为129Xe的极化率。由图2的漏桶模型可以看到,PXe主要由自旋交换碰撞和129Xe本身的弛豫过程决定。自旋交换碰撞主要和气体温度、压强、气体配比以及87Rb的极化率有关,弛豫过程主要与气体温度、压强、气体配比以及磁场均匀度有关。当气室温度、充入气体比例、压强以及磁场线圈确定后,弛豫过程近似为恒定状态,87Rb的极化率成为影响PXe的主要因素。
2.2 泵浦激光频率波动对87Rb原子极化率的影响
在静磁场作用下87Rb原子类似一个个转子,原子自旋磁矩的空间取向(平行或反平行静磁场)及其进动相位随机分布,原子自旋磁矩没有宏观指向性,不具有测量载体转动角速度的能力。泵浦激光器产生的圆偏振光将87Rb原子抽运到Zeeman能级,实现碱金属的泵浦。依据角动量守恒和能量守恒原理,87Rb原子吸收σ+光子后获得一份能量和一份角动量,从低能级(F=1∶2,mF)跃迁至高能级(F′=1∶2,mF+1)。由于不存在高能级(F′=1∶2,mF=3),处于低能级(F=2,mF=2)的87Rb原子无法吸收σ+光子发生跃迁。处于高能级(F′=1∶2,mF)的87Rb原子通过自发辐射、碰撞退极化返回低能级(F=1∶2,mF∶mF±1)。激光抽运特定时间(通常为87Rb原子自旋弛豫时间)后原子体系达到平衡,多数87Rb原子布居于Zeeman能级(F=2,mF=2),电子自旋磁矩具有宏观指向性,实现了87Rb原子的极化。
87Rb原子极化率定量描述为:
其中,n+为自旋为1/2的原子布居数,n-为自旋为-1/2的原子布居数。87Rb原子极化率随时间变化规律为:
其中,RP为泵浦光的泵浦率,Rrel为碱金属原子的弛豫率。在给定的原子气室中,碱金属原子的弛豫率近似为常值。影响87Rb原子极化率稳定性的主要因素是泵浦光的泵浦率[9]:
其中,Pυ为泵浦光的功率,A为光斑面积,c为光速,re为电子的电磁半径,f为常数(D1线为1/3,D2线为2/3),h为普朗克常量,υ0为87Rb的原子共振跃迁频率,L(υ)为泵浦光频率υ的一个函数:
其中,Γυ是共振峰宽度,与气室温度和气体比例有关,是一个常量,量级为百兆赫。可以看出,影响泵浦光泵浦率的主要因素是泵浦激光的功率和频率。
图3和图4给出了泵浦激光频率和功率波动时泵浦率的变化。泵浦光的泵浦率与功率呈线性关系,与泵浦光的频率呈钟形曲线。泵浦光频率处于87Rb原子跃迁共振频率处时泵浦率最大,泵浦光频率偏离87Rb原子共振跃迁频率时泵浦率急剧减小。泵浦光频率波动对泵浦率稳定性的影响极其显著。
3 实验结果和分析
图5给出了泵浦激光器自由运转情况下,核磁共振陀螺仪零位和泵浦激光频率误差随时间的变化。陀螺仪的零位变化趋势与泵浦激光频率误差信号的变化趋势一致,从实验上证明了泵浦激光频率的变化直接影响核磁共振陀螺仪的零偏稳定性。
以图5中的频率误差υerror1为自变量,陀螺仪零位Bgyro1为因变量,对实验数据进行最小二乘拟合得到陀螺仪零位和泵浦激光频率误差之间的关系:
实验测得的另外一组数据Bgyro2和υerror2如图6 (a)所示。将Bgyro2和υerror2带入式(13)对陀螺仪零位进行补偿,补偿后残差如图6(b)所示。
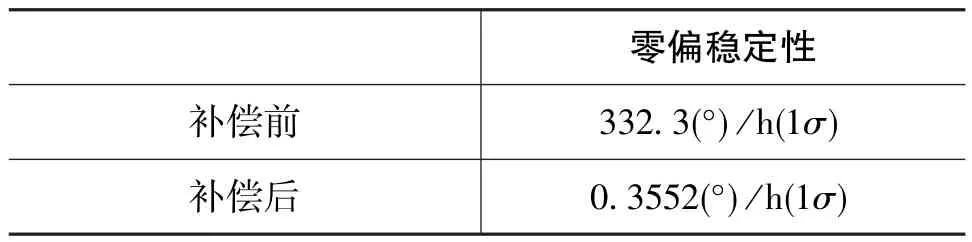
表1 补偿前后陀螺仪零偏稳定性对比Table 1 Gyro bias stability comparison before and after compensation
表1给出了补偿前后陀螺仪零偏稳定性的对比。由数据可以看出,陀螺仪的零偏稳定性由332.3(°)/h(1σ)降低至0.3552(°)/h(1σ),提升了近3个量级。可见泵浦激光频率的稳定性是影响核磁共振陀螺仪零偏稳定性的重要因素。
4 结论
本文研究了核磁共振陀螺仪理论模型和自旋交换光泵浦激光129Xe的过程,从理论上分析了泵浦激光频率漂移对核磁共振陀螺仪零偏稳定性的影响机理。通过对比核磁共振陀螺仪零位输出和补偿后的残差,发现泵浦光频率波动会导致陀螺仪零偏稳定性下降近3个数量级。对泵浦光频率进行稳定控制将是提高核磁共振陀螺仪零偏稳定性的重要技术途径。
[1] 马永龙.原子陀螺仪的研究进展[J].光学与光电技术,2015,13(3):89⁃92. MA Yong⁃long.Progress ofatomic gyroscope[J].Optics&Optoelectronic Technology,2015,13(3):89⁃92.
[2] 刘院省,王巍,王学锋.微型核磁共振陀螺仪的关键技术及发展趋势[J].导航与控制,2014,13(4):1⁃6. LIU Yuan⁃xing,WANG Wei,WANG Xue⁃feng.Key tech⁃nology and development tendency of micro nuclear magnetic resonance gyroscope[J].Navigation and Control,2014,13 (4):1⁃6.
[3] 王巍.惯性技术研究现状及发展趋势[J].自动化学报,2013,39(6):723⁃729. WANG Wei.Status and development trend of inertial technology[J].Acta Automatica Sinica,2013,39(6): 723⁃729.
[4] Mirijanian J J.Techniques to characterize vaper cell per⁃formance for a nuclear magnetic resonance gyroscope[D]. California Polytechnic State University,2012.
[5] Meyer D,Larsen M.Nuclear magnetic resonance gyro for inertial navigation[J].Gyroscope and Navigation,2014,5 (2):75⁃82.
[6] Donley E A.Nuclear magnetic resonance gyroscopes[J]. IEEE Sensors,2010,143(2):17⁃22.
[7] 王莉,郑仁蓉,朱顺泉.求解Bloch方程的注释[J].大学物理,2006,11(25):18⁃19. WANG Li,ZHENG Ren⁃rong,ZHU Shun⁃quan.Annota⁃tions on solving Bloch equation[J].College Physics,2006,11(25):18⁃19.
[8] 周欣.激光极化129Xe的核磁共振研究[D].中国科学院,2004. ZHOU Xin.Study of laser⁃polarized129Xe via nuclear magnetic resonance[D].University of Chinese Academy of Sciences,2004.
[9] Seltzer S J,Romalis M V.High⁃temperature alkali vapor cells with ant relaxation surface coatings[J].Journal of Applied Physics,2009,106(11):1⁃8.
Research on Bias Drift of Nuclear Magnetic Resonance Gyro with Frequency Fluctuation of Pump Laser
ZHOU Wei⁃yang,WANG Xue⁃feng,DENG Yi⁃cheng,LIU Yuan⁃xing
(Beijing Institute of Aerospace Control Devices,Beijing 100039)
The bias drift of NMRG with the frequency fluctuation of pump laser has been investigated in this paper. The theoretical model of NMRG and the process of129Xe polarization via spin⁃exchange optical pumping(SEOP)have been analyzed.The principle that how the bias drift of NMRG is affected by the frequency fluctuation of pump laser has been studied.The result shows that the bias drift of NMRG deteriorates almost three orders due to the frequency fluctuation of pump laser.The frequency fluctuation of pump laser is an important factor for further improving the performance of NMRG.
nuclear magnetic resonance gyro;pump laser;frequency fluctuation;bias drift
U666.12+3
A
1674⁃5558(2017)02⁃01363
10.3969/j.issn.1674⁃5558.2017.02.009
周维洋,男,硕士,研究方向为核磁共振陀螺仪激光频率稳定控制技术。
2017⁃01⁃09
国家自然科学基金青年基金(编号:61601017)
