锚链预张力对 FDPSO 运动响应的影响
2017-04-20任慧龙孙艳龙刘振东
晏 柳,任慧龙,孙艳龙,刘振东
(哈尔滨工程大学,船舶工程学院,黑龙江 哈尔滨 150001)
锚链预张力对 FDPSO 运动响应的影响
晏 柳,任慧龙,孙艳龙,刘振东
(哈尔滨工程大学,船舶工程学院,黑龙江 哈尔滨 150001)
作为一种综合性浮式平台,浮式钻井生产储油船简称 FDPSO,具备石油钻探、生产、储备等功能,是在浮式生产储油船的基础上发展而来。FDPSO 主要工作于海况比较恶劣的深水海域,因而如何准确预报 FDPSO的运动响应和锚链的预张力非常必要。本文基于时域耦合方法对 FDPSO 运动响应和锚链的预张力进行预报,在此基础上将数值结果与试验结果进行对比以验证理论计算的可靠性。通过改变锚链线的预张力来研究预张力对 FDPSO运动响应的影响。文中提供了运动响应的时历曲线和响应谱,并对比分析其中的异同,结果表明锚链预张力对纵荡、横荡和横摇运动的响应影响比较大。
FDPSO;运动响应;锚链预张力
0 引 言
人类对海上油气开发已有 60 年的历史,海洋平台的工作水深已由浅海拓展至深水海域。工作于深水海域的平台包括深水多功能半潜平台(SEMI)、张力腿平台(TLP)及浮式生产储油船(FPSO)及浮式生产钻井储油装置(FDPSO)[1]。在这些不同类型的海洋平台中,FDPSO 集石油钻探与生产功能于一体,这极大地缩短了石油开采的周期,提高了工作效率,降低前期作业成本,使其成为深海油田开采的理想平台。
FDPSO 长期工作于深水海域,通过锚链系统来提供船体运动响应的恢复力。但FDPSO 受风浪影响比较大,对浪向角也比较敏感,抵抗恶劣海况的能力差。为了提高钻井船的工作效率,对其进行深入的水动力性能研究十分必要。
目前,一些学者针对锚链线参数对浮式平台响应的影响开展了相关研究。通过对某半潜式平台的多点系泊系统的研究,Smith 等[2]和 Radwan 等[3]给出了锚链系统设计的相关图表。基于静态优化理论,XU 等[4]研究了截断后系泊系统的参数对半潜式平台运动响应的影响。Chen 等[5]研究了不同水深下 Spar 平台的运动性能。Luis 等[6]应用非线性动力学研究了多点锚泊系统的水动力性能。Montasir 等[7]研究了对称和不对称的锚链布置对 Spar 平台的动态响应的影响。
根据国内外的研究现状可知,仅有一少部分的学者考虑了锚链预张力与船体运动响应的关系,因而本文将着重研究这一方面。文中采用 Ansys AQWA 时域耦合计算模块,对船体运动响应和锚链预张力进行计算,并将计算结果与试验结果进行对比。为了进一步考虑锚链预张力的影响,采用4种不同的系泊系统,并分别计算运动响应,分析比较其异同。
1 理论基础
1.1 绕射/辐射力
本文假设流体是理想无旋流体,适用于势流理论,并且假设作用于浮体上的入射波是微幅波,流体的运动可以用速度势描述。(x,y,z)和 t分别为相对于固定坐标系的位置矢量和时间[8]。
根据势流理论,势函数可以分解为入射势、绕射势和辐射势。
式中:ϕI为入射波势;ϕd为绕射波势;ϕj为 j 模态下的辐射势;xj为单位波幅下 j 态的运动;ω 为入射波频率。
流场中一点(x,y,z)的入射势为:
式中:d 为水深;k 为波数;θ 为浪向(0° 为顺着 x 轴方向)。
通过求解流域内满足边界条件的边界积分方程,可以求出速度势,进而通过伯努利方程求得一阶水动力压力分布为:
通过对浮体湿表面压力积分,可以得到流体作用力。水动力可以分解成入射力和绕射力。作用力表达为:
式中:SB为湿表面面积;n 为浮体表面单位法向量。由于船体运动产生的辐射力为:
进一步分解为:
式中:Aij为附加质量系数;Bij为阻尼系数。
式中:x 为单位波幅下的运动(RAO);ω 为入射波频率;F 为浮体受到的波浪力;C 为线性阻尼矩阵。
1.2 二阶平均漂移力
二阶平均漂移力对于浮式平台至关重要,应用远场公式可以计算得到[9]。二阶波浪平均漂移力和力矩为:
式中:WL 为水线长度,ζr为相对波高,S0为浮体湿表面,¨g为重力加速度。一般来说,波浪谱由不同频率的波列组成。二阶波浪力表达为:
其中 Pij和 Qij分别为和频和差频的平方阶传递函数。
1.3 FDPSO 的时域耦合分析
式中:Ms为 FDPSO 的质量矩阵;Ma(t)为附加质量;C 为阻尼矩阵;x(t)为位移矩阵;Fwave(t)为波浪激励力;Fcurrent(t)和Fwind(t)分别为流载荷和风载荷;Fmoor(t)为锚链力。
2 模型试验
2.1 FDPSO 设计参数
在哈尔滨工程大学海洋工程水池开展相关的模型试验,水池长 50 m,宽 30 m,深 10 m。为了既能满座试验精度的要求,又能使模型更好的布置到水池中,模型缩尺取为 1:60。模型长 42 000 mm,宽 815 mm,高 1 860 mm。模型重 9 630 kg。模型的实际效果如图 1所示,主要参数见表 1。试验中 FDPSO 采用多点系泊,包括 16 根锚链线。锚链系统的布置见图 2,锚链线的主要参数见表 2。
在静水环境下进行了 FDPSO 系统的衰减试验,通过衰减时历曲线得到纵荡和横荡的无因此阻尼系数(见表 3)。
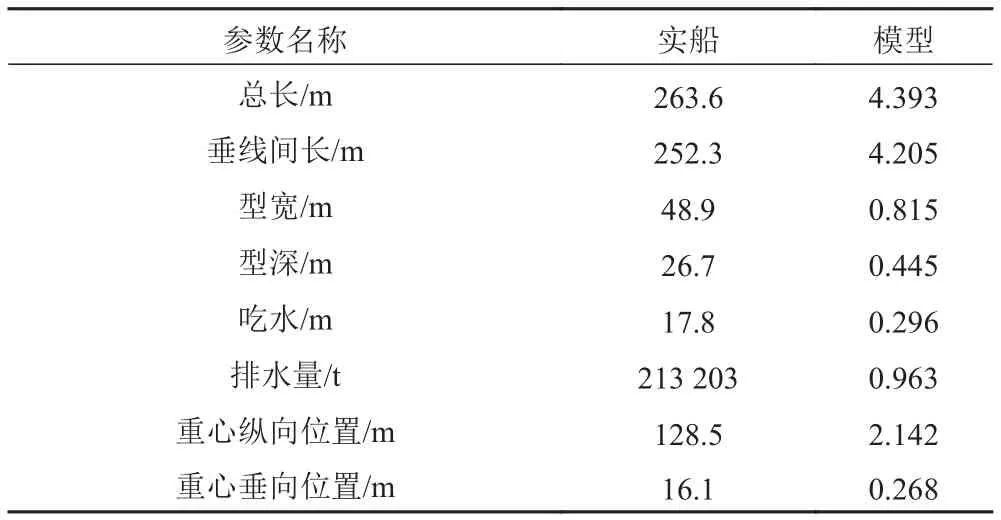
表 1 FDPSO 主要设计参数Tab. 1 Main characteristic parameters of the FDPSO

表 2 锚链线参数Tab. 2 Parameters of mooring lines
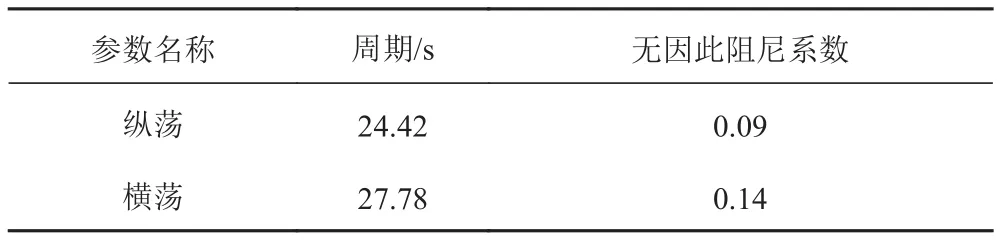
表 3 纵荡和横荡衰减Tab. 3 Surge and sway free decay results
2.2 环境参数
模型试验中采用的波浪参数见表 4,造波机通过 3参数 JONSWAP 谱来制造时历不规则波。JONSWAP 谱公式为:
式中: S(ω)为波浪谱能量分布;Hs为有义波高;Tp为谱峰周期,s ;γ 为谱峰值参数。
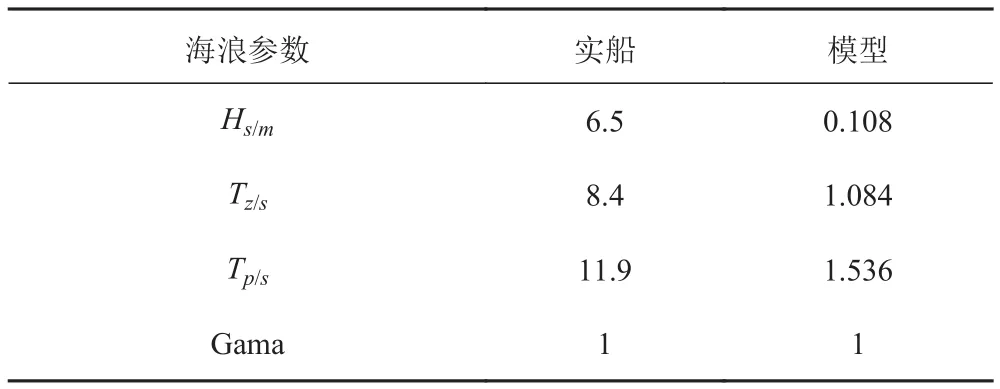
表 4 南海海浪谱参数Tab. 4 Wave parameters of the South Sea
3 结果与讨论
采用 AQWA-LINE 频域水动力计算模块计算该FDPSO 的附加质量、辐射阻尼、一阶波浪力和二阶定长漂移力。在船体湿表面网格划分的过程中,为了使计算结果尽可能精确,而又不超过程序所允许的最大网格数(12 000 单元),文中采用最大网格边长不超过 1.0 m 的形式来控制网格的大小,水动力网格效果图如图 3所示。计算出该水动力模型的水动力参数及频域响应 RAO,在此基础上可利用时域耦合计算模块AQWA-DRIFT 计算出 FDPSO 系统的时历响应结果。
3.1 理论计算结果与试验结果对比分析
为了进一步验证该数值计算方法的精度和可靠性,本文将理论计算结果与试验结果进行对比。受到试验条件的限制,文中仅对比分析了 FDPSO 系统五自由度运动(缺少首摇)。在所选取的工况中,由于13# 锚链线的张力变化最剧烈,因此在谈论中选取该锚链线作为研究对象,比较结果见表 5。通过表 5 中数据可以得出,理论计算结果与试验结果吻合的比较好,误差在可接受的范围内,从而验证了理论计算方法的可靠性。
3.2 锚链线预张力对 FDPSO 运动响应的影响
文中采用南海百年一遇的海况对该 FDPSO 系统进行模拟,为了更好研究锚泊系统对 FDPSO 运动响应的影响,分别计算4种不同锚链预张力下 FDPSO 的运动响应。这4种不同的锚泊系统对应的预张力分别为 2 270,2 900,4 800 和 8 800 kN(为了描述方便,下文中采用 CaseⅠ,CaseⅡ,CaseⅢ 和 CaseⅣ表示)。通过数值模拟可以得到运动响应和锚链张力变化的时历信号,
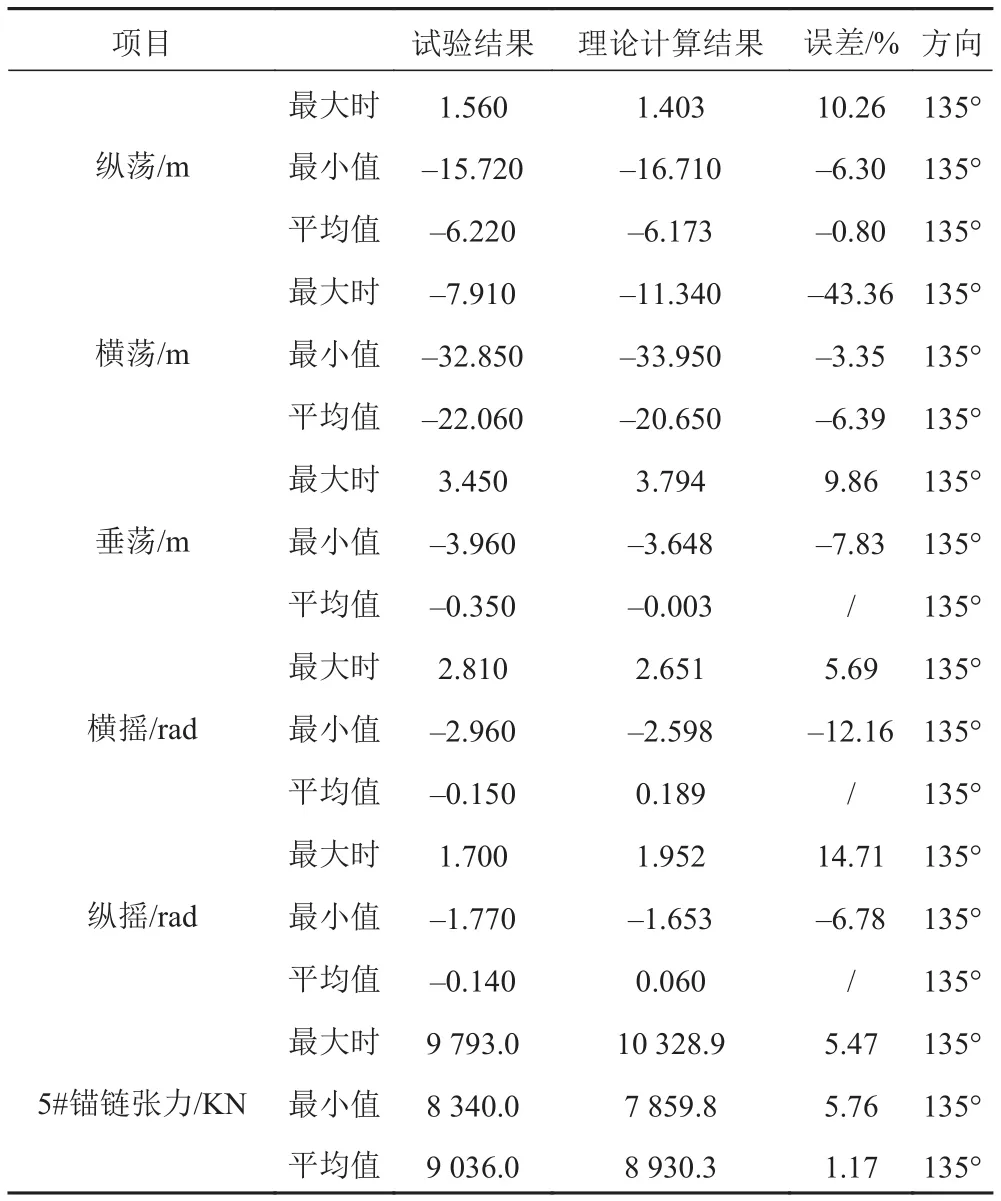
表 5 理论计算结果与试验结果的对比Tab. 5 Comparison of the results between experiment prediction and numerical prediction
数值计算结果见图 4 和表 6。通过图 4(a) 和 4(b)可以得出不同的锚链预张力下 FDPSO 系统的纵荡和横荡运动响应结果相差较大,随着预张力的逐渐减小,运动响应的幅值和均值在不断变大。对于垂荡运动仅仅是均值发生了变化,这可以解释为锚链预张力的变化改变了初始状态下主船体的吃水。图 4(d) 显示了不同锚链预张力下横摇运动的周期不同,而运动的最大值最小值并未有明显的变化。
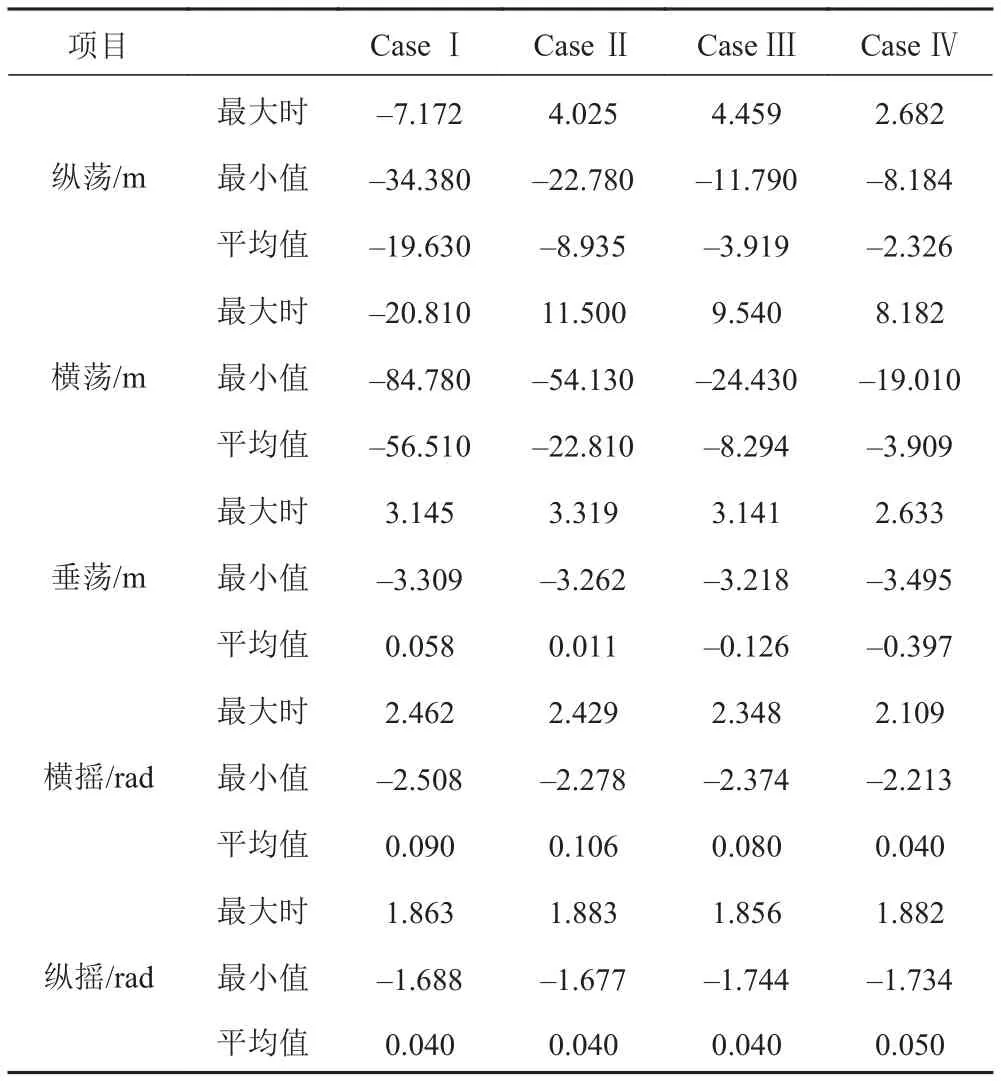
表 6 FDPSO 运动响应结果的对比Tab. 6 Comparison of FDPSO motion results
为了进一步研究运动响应之间的区别,采用谱分析的方法对运动的时历信号进行傅里叶变化,求得运动响应谱。通常按照频率的高低,将运动响应谱划分为波频响应和低频响应[10]。从图 5 中不难得出,对于纵荡和横荡运动低频响应是主要的成分,而对于垂荡、横摇和纵摇,波频成分是主要的。随着锚链预张力的逐渐变小,纵荡和横荡响应谱的峰值逐渐变大(图 5(a) 和 5(b)),这是由于纵荡和横荡运动的幅值会随预张力水平的下降而逐渐变大造成的(图 4(a) 和4(b))。结合图 4(a),4(b),5(a) 和 5(b),不难得出锚链预张力对纵荡和横荡运动响应的影响较大。参照 API规范[11]可知海上浮式采油平台的水平位移不得超过水深的 5%。为了满足这一要求,锚泊系统的预张力在设计之初就应被着重考虑。锚链预张力的变化对垂荡和纵摇响应的影响并不大(图 4(c),4(e),5(c) 和5(e))。从公式可以得出在船体质量保持不变的情况下,增大恢复力系数 k 会使运动响应的共振周期变大,这与文中得出的运动响应谱的峰值周期的变化趋势一致。对比图 5(d),5(c)和 5(e),可以得到锚链预张力的变化对横摇运动的影响比较大而对垂荡和纵摇的影响比较小。这是由于锚链力在不同运动方向上占总的合外力的比重不同造成的(见图 6)。
4 结 语
本文采用时域耦合计算方法对 FDPSO 系统的运动响应和锚链张力进行数值预报,并与试验结果进行对比验证了理论计算的可行性,在此基础上分别计算了不同预张力水平下的响应,通过对比分析计算结果得出以下结论:
1)低频运动是 FDPSO 系统纵荡和横荡运动的主要成分,随着锚链预张力的减小,纵荡和横荡运动响应的幅值会显著增大,在锚链系统的设计中应着重考虑。
2)对于垂荡、横摇和纵摇波频响应占主要部分,锚链预张力的变化对横摇运动的影响比较大而对垂荡和纵摇的影响比较小。随着预张力的增大,横摇运动响应谱的峰值周期逐渐变大。
[1]苏志勇, 陈刚. 混合模型试验中截断系泊缆动力特性差异研究[D]. 上海: 上海交通大学, 2009.
[2]SMITH, CHEN M C, RADWAN A M. “Systematic data for the preliminary design of mooring systems[J]”. Offshore Mechanics and Arctic Engineering Symposium, 1985[1].
[3]RADWAN, CHEN A M C, LEAVITT C W. “Design Curves for Chain Mooring Systems[J]”. Offshore Mechanics and Arctic Engineering Symposium, 1986(3).
[4]XU Sheng, JI Chun-yan. “Dynamic of large-truncated mooring systems coupled with a catenary moored semi-submersible[J]”. China Ocean Engineering, 2014,28(2), 149–162.
[5]CHEN X H, MA J, W. “On dynamic coupling effects between a spar and its mooring lines[J]”. Ocean Engineering, 2001, 28: 863–887.
[6]LUIS O G, MIACHAEL M B. “Analytical expressions of the bifurcation boundaries for symmetric spread mooring systems”. Appl Ocean Res, 1995, 17: 325–341.
[7]MONTASIR O A, YENDURI A, KURIAN V J. “Effect of mooring line configurations on the dynamic responses of truss Spar platforms[J]”. Ocean Engineering, 2015, 96: 161–172.
[8]戴遗山, 段文洋. 船舶在波浪中运动的势流理论[M]. 北京:国防工业出版社, 2008.
[9]刘应中, 缪国平. 船舶在波浪上的运动理论[M]. 上海:上海交通大学出版社, 1987.
[10]American Petroleum Institute (API). Design and Analysis of Stationkeeping Systems for Floating Structures. Recommended Practice 2SK, API-RP-2SK, 2005.
[11]JI Chun-yan, YUAN Zhi-ming. “Study on a new mooring system integrating catenary with taut mooring”[J]. China Ocean Engineering, 2005, 25: 427–440.
[12]李焱, 唐友刚, 赵志娟. 新型多筒式FDPSO概念设计及其系泊系统分析[J]. 中国舰船研究, 2013(5). LI Yan, TANG You-gang, ZHAO Zhi-juan. Concept design and analysis of the mooring system for the new type of multitubular FDPSO[J]. Chinese Journal of Ship Research, 2013(5).
The effect of mooring line pre-tension on FDPSO's motion
YAN Liu, REN Hui-long, SUN Yan-long, LIU Zhen-dong
(Harbin Engineering University, College of Marine Engineering, Harbin 150001, China)
As a multifunction floating platform, Floating Drilling, Production, Storage and Offloading (FDPSO) combining the well-known Floating Production, Storage and Offloading (FPSO) with a drilling unit. For the environment condition of deep-water oilfield is very severe, the motion response and mooring line tension of FDPSO is a worthy topic of studying. In this study, the numerical time-domain coupled prediction method for the mooring line tension and motion response of FDPSO system is constructed by Ansys AQWA software. Furthermore, the results of a model test conducted in Harbin Engineering University are used to investigate the feasibility and validity of the commercial simulation. The effect of mooring line pre-tension on the response of FDPSO is studied by varying the pre-tension of mooring line during the calculation. The time series curve of the mooring line tension and motion response, and the comparison of motion spectrum and mooring line tension spectrum are provided in this article. The findings from this study have shown the pre-tension of mooring line has considerable influence on the surge, sway and roll motion's spectrum density distribution.
FDPSO;motion response;mooring line pre-tension
P751
A
1672–7619(2017)03–0023–06
10.3404/j.issn.1672–7619.2017.03.005
2016–07–11;
2016–08–15
晏柳(1992–),女,硕士研究生,研究方向为环境载荷与结构物强度。
