近距离跟踪指向空间非合作目标有限时间控制
2017-04-19马广富孙延超凌惠祥李传江
马广富,孙延超,凌惠祥,李传江
(哈尔滨工业大学 航天学院,哈尔滨150001)
近距离跟踪指向空间非合作目标有限时间控制
马广富,孙延超,凌惠祥,李传江
(哈尔滨工业大学 航天学院,哈尔滨150001)
追踪航天器在对空间非合作目标进行近距离跟踪与监视时,需要接近非合作目标并从特定方位保持对目标的指向与观测.针对非合作目标存在姿态翻滚以及未知轨道机动时追踪航天器保持近距离跟踪与指向的问题,在视线坐标系和体坐标系下分别建立了相对轨道和姿态的动力学方程,并构建了对轨道与姿态同步控制的六自由度模型,利用RBF神经网络对系统不确定性及未知的目标运动参数进行自适应估计和补偿,采用反步法思想设计控制器使追踪航天器在有限时间内收敛到期望的相对轨道和姿态并维持保持状态.进一步考虑控制输入饱和、死区等非线性特性,对控制律进行改进.改进后的控制算法可以有效地提高控制精度,仿真结果验证了控制对象模型和控制算法的有效性.
空间非合作目标;视线坐标系;有限时间控制;RBF神经网络;反步法;输入受限
随着航天事业的快速发展,空间技术逐渐从最初的空间利用提升为空间控制[1],空间打击、跟踪监视、交会对接等问题的研究越来越受到航天大国的关注和重视,其中对空间非合作目标的接近和近距离跟踪监视问题已经成为当今航天领域的一个非常重要的研究热点.
经典的相对轨道动力学模型中,无论是只适用于近圆轨道的C-W方程还是考虑了轨道偏心率非零情况的Lawden方程[2-3],当针对非合作目标时,由于对目标的一些运动参数难以精确测量而无法有效使用.从接近非合作目标时的实际测量情况出发,文献[4-6]提到了一种在以追踪航天器质心为原点的视线坐标系下建立的相对运动模型,具有不限制目标轨道偏心率,解算方程不受目标未知参数影响,可在任意初始位置进行逼近和视线跟踪等优点.文献[5]还综合考虑体坐标系下由相对误差四元数描述的相对姿态方程,从而建立了六自由度的动力学模型.相对轨道与姿态的控制耦合问题主要有两方面原因,一种是由期望控制指令引起的,另一种则是因为推力与姿态有关导致的[7].对于姿态轨道耦合控制,许多学者都进行了研究,其中文献[8-9]从HJB方程中导出了鲁棒性较好且使用方便的状态依赖黎卡提方程法(state-dependent riccati equation,SDRE),可以用来解决一些含有不确定性的鲁棒控制问题,但在线求解黎卡提方程使计算负担增大.文献[5,10-11]在进行姿轨耦合控制时,以能量消耗以及误差最小为指标,引入中间变量,将SDRE方程转化为迭代方程,有效降低了计算负担,但这种控制方法在非合作目标同时存在轨道和姿态机动时,控制误差较大.值得说明的是,上述研究主要都还是集中在合作目标的情况,而对于接近和跟踪非合作目标的研究则较少.除了普遍存在模型不确定性和外部干扰外,对于追踪航天器,非合作目标的一些运动信息无法精确已知.RBF神经网络对未知非线性函数具有良好的逼近能力[12],因此可以对模型不确定性及外部干扰等进行逼近与补偿.目前对于接近并跟踪空间目标的研究大多都是实现控制误差渐近稳定的控制结果,并且理论上系统状态收敛到期望值的时间无穷大.有限时间控制[12]能够使闭环系统的状态在有限时间内收敛到平衡点,相比于非有限时间的控制方法不仅收敛更快,而且具有更好的鲁棒性.许多有限时间控制方法采用反步法的思想来设计控制律[13],使用递推的设计,使许多复杂、高阶非线性系统的控制律设计变得简便.对于实际的航天器控制,一定存在控制输入饱和、死区等非线性特性[14-15],因此在进行姿态、轨道控制律设计时有必要考虑这些非线性特性对系统的影响.
本文针对非合作目标存在姿态翻滚以及未知轨道机动时,追踪航天器对其保持近距离跟踪与指向的问题,建立了姿态与轨道同步控制模型.考虑到系统不确定性、非合作目标运动参数部分未知等情况,利用RBF神经网络方法进行自适应估计和补偿,采用反步法思想设计控制律使追踪航天器在有限时间内收敛到期望的相对轨道和姿态.然后,进一步考虑控制输入饱和、死区等非线性特性,对控制律进行改进.通过在相同仿真参数条件下对本文所提出的两种控制律进行仿真,验证了两种控制律的有效性,并且改进后的控制律在燃料消耗略微增加的情况下明显地提高了控制精度.
1 相对运动模型
1.1 视线坐标系
图1中下标i表示惯性坐标系,l表示视线坐标系.惯性系Oixiyizi与视线系Olxlylzl及其关系如图1所示,Ol为视线系的原点,位于追踪航天器质心,xl轴与视线重合,yl轴位于由xl轴和yi轴组成的平面内且与xl轴垂直,zl轴由右手定则确定.qε和qβ分别称为视线倾角和视线偏角,ρ为目标相对于追踪航天器的位置矢量[5].
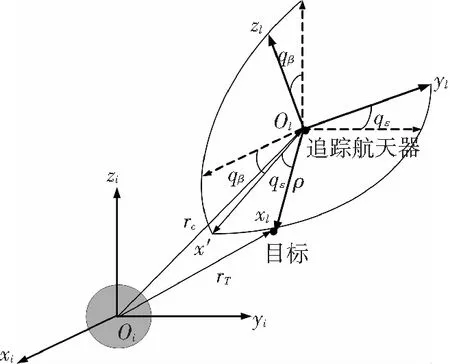
图1 地心惯性坐标系与视线坐标系的位置关系
1.2 相对轨道动力学模型
相对轨道的动力学方程在视线系的投影为[5]
(1)
式中:×为反对称矩阵;Δg=[Δgx,Δgy,Δgz]T为目标和追踪航天器间的引力差(在对目标进行近距离接近和跟踪时,该项可以忽略);f=[fx,fy, fz]T为目标的加速度,且对于追踪航天器是未知的;uc=[ucx,ucy,ucz]T为追踪航天器的控制加速度,其中下标c为追踪航天器.将式(1)写成分量的形式:
(2)
1.3 姿态动力学模型与运动学模型
追踪航天器的姿态动力学方程为
(3)
式中:Jc=diag(Jc1,Jc2,Jc3)为转动惯量矩阵;下标b为航天器体坐标系;ωbc=[ωx,ωy,ωz]T为相对惯性系的姿态角速度;Tc为控制力矩.
定义追踪航天器按zxy转序绕本体x、y、z轴的转角分别为φ、θ、ψ,则追踪航天器角速度可以表示为
(4)
为了表达式的简便,定义矩阵R为

(5)
则有
(6)
1.4 期望轨道解算
当非合作目标存在姿态翻滚时,在视线系下特征点的相对位置会改变,从而导致追踪航天器的期望轨道变化.设目标的特征点在其体坐标系下的单位矢量为nb,则追踪航天器视线的期望方向为-nb.所以追踪航天器期望视线方向在惯性系下的投影为[5]
(7)

(8)

1.5 期望姿态解算
在近距离跟踪非合作目标过程中,追踪航天器将实时对目标观测.假设观测装置中心线沿追踪航天器体坐标系的期望xbcf轴方向,要求xbc轴保持沿视线轴方向,则追踪航天器体坐标系三轴期望的单位矢量为[5]
(9)

即可求解期望姿态角φf、θf、ψf,对式(9)求导并利用式(4)即可求解期望姿态角速度.
1.6 控制模型状态空间表达式
针对本文所研究的问题,由于非合作目标的轨道机动未知,因此对于追踪航天器,在任务初始时刻是偏离期望轨道的,从而需要调整相对轨道以达到对目标跟踪监视的要求.然后进行跟踪保持控制,而目标的姿态信息是能够获取的,所以追踪航天器在初始时刻的姿态是接近期望姿态的,则式(10)是近似成立的.
(10)

(11)
本文将结合式(11)所示的非合作目标相对运动模型进行控制律设计,实现对空间非合作目标的接近、跟踪以及指向等控制需求.
2 非合作目标自适应神经网络有限时间控制律设计
2.1 自适应神经网络有限时间控制律设计
引理1[16]对于非线性系统:
(12)



对于近距离跟踪指向空间非合作机动目标的问题,由式(11)所组成的非合作目标相对运动模型可以写成如下不确定非线性动态系统形式:
(13)


(14)
式中:ci∈Rn,σi>0分别为第i个基函数的中心和宽度.
根据RBF神经网络逼近非线性函数的原理,根据文献[12],一般存在如下假设条件.
假设1 对于任意给定的足够小的正数εN,总能找到最优加权矩阵θ*使逼近误差满足.
假设2 最优加权矩阵θ*是有界的,即存在一个正常数λ,满足‖θ*‖≤λ.
因此非线性不确定函数w可以表示成
为了后续设计非合作目标控制律的需要,定义向量sig(·)α∈Rn的形式如下:
给出辅助控制器ν(e1)=-A-1(x1)K1sig(e1)α,其中K1=diag(k11,…,k1n)>0,0<α<1.定义误差变量为
(15)
将式(15)代入系统(13)得到:
(16)
对于系统(13),给出如下自适应控制律:

(17)
(18)
式中:K2=diag(k21,…,k2n)>0,K3>0,Γ为一个正定对角矩阵.

式中:λ、Δi分别为小的正常数;e1i为向量e1的第i个元素;ηi(e1i)为向量η(e1)的第i个元素.
定理1 对于非合作目标控制系统(13),假设1和2均成立,则在控制律(17)~(18)作用下,闭环系统是全局有限时间稳定的.
证 将控制律(17)代入式(16)可得
(19)
首先, 证明闭环系统(19)是全局渐近稳定的.
(20)
选取K3>εN>‖ε‖,对式(20)求导,并由式(19)可得

(21)

然后,证明闭环系统(19)是全局有限时间稳定的.
由式(14)可知高斯函数0<φi(e)≤1,则‖φ(e)‖有界,根据范数的基本放缩性质,可以得到:

(22)


(23)

因此,根据引理1,对于给定的初始状态e(0)=e0,e1和z将在有限时间内收敛到0.由ν(e1)和z的定义可知,当e1=0,z=0时,e2=0,因此闭环系统(19)是全局有限时间稳定的.
2.2 考虑输入非线性有限时间控制律设计
对于近距离跟踪指向非合作机动目标的问题,进一步考虑实际系统普遍存在的控制输入饱和、死区等非线性特性.因此将系统(13)改写成如下形式:
(24)
式中,D(u)为控制器的实际输出,与理想控制输出u、控制偏差Δu之间满足如下关系式:

为了达到更好的控制效果,采用RBF神经网络逼近g(x)Δu,可以得到:

对于不确定非线性动态系统(24),给出如下自适应控制律:

(25)
(26)
式中,ΓΔ为正定对角矩阵.
定理2 对于非合作目标控制系统(24),假设1和2均成立,则在控制律(25)~(26)作用下,闭环系统是全局有限时间稳定的.
证 将控制律(25)代入系统(24)可得
(27)
首先, 证明闭环系统(27)是全局渐近稳定的.

(28)
选取K3>εN+εΔN>‖ε‖+‖εΔ‖,对式(28)求导,并由系统(27)及式(25)可得

所以闭环系统(24)是全局渐近稳定的.
然后, 证明闭环系统(27)全局有限时间稳定.

因此,类似式(23)的处理过程,同理可以得到x1、z和x2在有限时间内收敛到0,因此闭环系统(27)是全局有限时间稳定的.
3 仿真校验
分别应用定理1,2的有限时间控制算法来解决近距离跟踪指向非合作机动目标的问题,其中目标的加速度矢量在本文提出的两种控制算法中未直接使用,而是采用RBF神经网络来估计.对于由式(12)构成的系统,分别按照式(17)和式(25)设计控制器,按照式(18)和式(26)设计神经网络加权矩阵更新律进行仿真,并加入控制饱和、死区等特性.
3.1 仿真参数
设追踪航天器相对目标的初始距离为260 m,首先接近到距目标100 m处,然后再进行视线跟踪.


控制律参数选取为K1=diag(0.28,0.05,0.10,1.00,1.00,4.00), K2=diag(6.50,2.00,2.60,0.80,0.36,0.40),K3=1×10-7,α= 0.8,λ=0.01,Δi=0.01.仿真时间为1 000s.
3.2 仿真结果及分析
图2为追踪航天器在近距离跟踪指向非合作目标过程中相对轨道参数随时间变化的曲线,包括相对距离、视线倾角和视线偏角.结合局部放大图可以看出,在算法(17)或算法(25)作用下,都可以使追踪航天器在22.9 s内从相距目标260 m接近到100 m,并保持对期望轨道的跟踪.
图3为追踪航天器姿态角随时间变化曲线,结合局部放大图可以看出,在算法(17)或算法(25)作用下,都可以使姿态角在5.7 s内快速趋近于期望值,并保持在期望值附近,实现对非合作目标的指向观测.
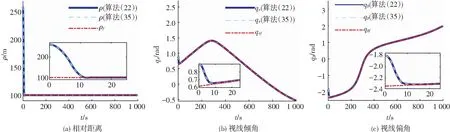
图2 轨道相关参数随时间变化曲线
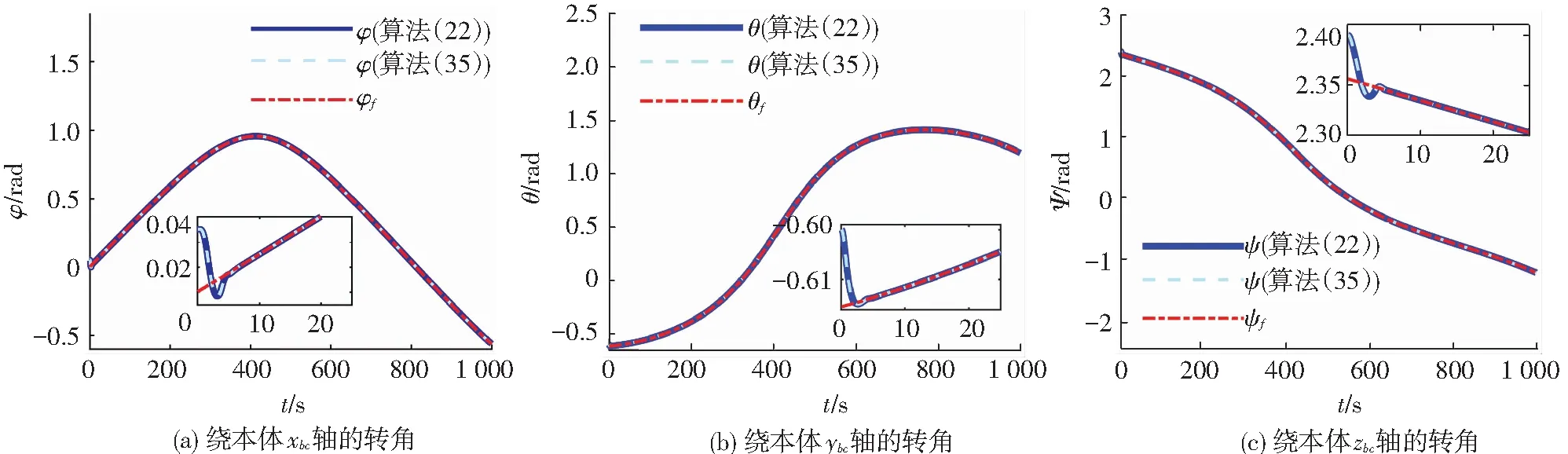
图3 追踪航天器姿态角随时间变化曲线


图4 神经网络的估计曲线
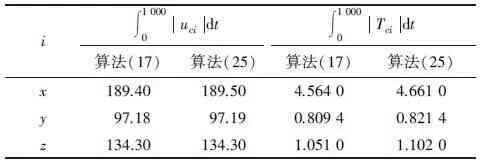
表1 全过程的燃料消耗对比情况

表2 控制精度对比情况
4 结 论
1)在视线坐标系和体坐标系下分别建立了相对轨道和姿态的动力学方程,构建了姿态轨道同步控制的六自由度模型.
2)利用RBF神经网络对系统不确定性及未知的目标运动参数进行自适应估计和补偿,采用反步法思想设计控制器使追踪航天器在有限时间内收敛到期望的相对轨道和姿态并保持.
3)进一步考虑控制输入饱和、死区等非线性特性,对控制律进行改进,在燃料消耗略有增加的情况下明显地提高了控制精度.
[1] 苏晏, 李克行, 黎康. 非合作目标追踪与相对状态保持控制技术研究[J]. 空间控制技术与应用, 2010, 36(6): 51-55. DOI: 10.3969/j.issn.1674-1579.2010.06. 011. SU Yan, LI Kehang, LI Kang. Control technology for relative states tracking and holding to uncooperative spacecraft[J]. Aerospace Contrd and Application, 2010, 36(6): 51-55. DOI: 10.3969/j.issn.1674-1579.2010.06. 011.
[2] CLOHESSY W H, WILTSHIRE R S. Terminal guidance gystem for satellite rendezvous[J]. Journal of the Astronautical Sciences, 1960, 27(9):653-658, 674. DOI: 10.2514/8.8704.
[3] LAWDEND F. Optimal trajectories for space navigation [M]. London: Butterworths, 1963.
[4] 张大伟, 宋申民, 裴润, 等. 非合作目标自主交会对接的椭圆蔓叶线势函数制导[J]. 宇航学报, 2010, 31(10): 2259-2268. DOI: 10.3873/j.issn.1000-1328.2010.10. 005. ZHANG Dawei, SONG Shenmin, PEI Run, et al. Ellipse cissoid-based potential function guidance for autonomous rendezvous and docking with non-cooperative target[J]. Journal of Astronautics, 2010,31(10): 2259-2268. DOI: 10.3873/j.issn.1000-1328.2010.10. 005.
[5] 高登巍, 罗建军, 马卫华, 等. 接近和跟踪非合作机动目标的非线性最优控制[J]. 宇航学报, 2013, 34(6): 773-781. DOI: 10.3873/j.issn.1000-1328.2013.06.005. GAO Dengwei, LUO Jianjun, MA Weihua, et al. Nonlinear Optimal control of spacecraft approaching and tracking a non-cooperative maneuvering object[J]. Journal of Astronautics, 2013, 34(6): 773-781. DOI: 10.3873/j.issn.1000-1328.2013.06.005.
[6] 崔乃刚, 张立佳. 微型航天器与空间非合作目标交会制导方法[J]. 航空学报, 2009, 30(8): 1466-1471. DOI: 10.3321/j.issn:1000-6893.2009.08.017. CUI Naigang, ZHANG Lijia. Guidance of micro-spacecraft for rendezvous with noncooperative target[J]. ACTA Aeronautica ET Astronautica Sinica, 2009, 30(8): 1466-1471. DOI: 10.3321/j.issn:1000-6893.2009.08. 017.
[7] 卢伟, 耿云海, 陈雪芹, 等. 在轨服务航天器对目标的相对位置和姿态耦合控制[J]. 航空学报, 2011, 32(5): 857-865. LU Wei, GENG Yunhai, CHEN Xueqin, et al. Coupled control of relative position and attitude for on-orbit servicing spacecraft with respect to target[J]. ACTA Aeronautica ET Astronautica Sinica, 2011, 32(5): 857-865.
[8] STANSBERYD T, CLOUTIER J R. Position and attitude control of a spacecraft using the state-dependent riccati equation technique[C]//Proceedings of the American Control Conference. Chicago, IL: IEEE, 2000, 3: 1867-1871. DOI: 10.1109/ACC.2000.879525.
[9] XIN Ming, BALAKRISHNAN S N. State dependent Riccati equation based spacecraft attitude control [C]//Proceedings of the 40th AIAA Aerospace Sciences Meeting and Exhibit. Reno, NV: AIAA, 2002: 14-17.DOI: 10.2514/6.2002-1071.
[10] XIN Ming, PAN Hejia. Nonlinear optimal control of spacecraft approaching a tumbling target [J]. Aerospace Science and Technology, 2011, 15(2):79-89.DOI: 10.1016/j.ast.2010.05.009.
[11] XIN Ming, BALAKRISHNAN S N, STANSBERY D T. Spacecraft position and attitude control withθ-Dtechnique [C]//Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit Renosn. Reno, Nevada: AIAA, 2004. DOI: 10.2514/6.2004-540.
[12] LIU Haitao, ZHANG Tie. Adaptive neural network finite-time control for uncertain robotic manipulators [J]. Journal of Intelligent & Robotic Systems, 2014, 75(3/4): 363-377. DOI: 10.1007/s10846-013-9888-5.
[13] GUO Yong, SONG Shenmin. Adaptive finite-time backstepping control for attitude tracking of spacecraft based on rotation matrix[J]. Chinese Journal of Aeronautics, 2014, 27(2): 375-382. DOI: 10.1016/j.cja.2014.02.017.
[14] LU Kunfeng, XIA Yuanqing, FU Mengyin. Controller design for rigid spacecraft attitude tracking with actuator saturation[J]. Information Sciences, 2013, 220: 343-366.DOI: 10.1016/j.ins.2012.07.039.
[15] JASIM N F, JASIM I F. Robustadaptive control of spacecraft attitude systems with unknown dead zones of unknown bounds[J]. Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, 2012, 226(7): 947-955. DOI :10.1177/0959651812443926.
[16] BHATS P, BERNSTEIN D S. Finite-time stability of continuous autonomous systems [J]. SIAM Journal on Control and Optimization, 2000, 38(3): 751-766. DOI: 10.1137/S0363012997321358.
(编辑 张 红)
封面图片说明
封面图片来自本期论文“集群航天器网络发展现状及关键技术”,是哈尔滨工业大学航天学院所研究的集群航天器示意图.集群航天器是一种通过无线链路进行信息交互的,多航天器间协同工作的新型航天器构架,服务于未来日益复杂多样的空间探索任务.如左图中所示,空间信息网络作为一个以多种空间平台(如同步卫星或中、低轨道卫星、平流层气球等)为载体,实时获取、传输和处理空间信息的网络系统,而集群航天器网络则是构成该信息网络的一类子网络系统,承担着空间信息采集与传输的任务.右上图为多个集群航天器在轨协同工作的示意图,如集群航天器A、D之间通过星间无线链路协同完成空间任务.同时,该图也说明了集群航天器是一类由多个近距离相伴飞行的航天器构成的分布式系统.右下图为集群航天器网络内各航天器在一定范围内相互绕飞,其网络拓扑结构随时间变化,且变化规律具有周期性和可预测性.
(图文提供:陈庆,张锦绣,曹喜滨.哈尔滨工业大学 航天学院)
Finite-time control of spacecraft closely tracking and pointing non-cooperative space target
MA Guangfu, SUN Yanchao, LING Huixiang, LI Chuanjiang
(School of Astronautics, Harbin Institute of Technology, Harbin 150001, China)
When the chaser spacecraft closely tracks and observes the non-cooperative target in space, it should approach to and keep pointing to the non-cooperative target from the particular direction. For the problem that the chaser spacecraft keeps closely tracking and pointing to the non-cooperative target, in the case of the target with the attitude motion and the unknown orbit maneuver, based on the relative orbit dynamics and the attitude dynamics which are described in the line-of-sight coordinate frame and the body coordinate frame, respectively, the six-degree-of-freedom model of orbit and attitude simultaneously control is proposed. The RBF neural network is employed to adaptively estimate and compensate the system uncertainties and the unknown motion parameters of the target. Using the backstepping method, a controller which can control the chaser spacecraft to converge to the desired relative orbit and attitude in finite time is proposed. Considering the nonlinearity of the control input, such as saturation and dead zone, an improved control algorithm is developed. The simulation results are provided to show the effectiveness of the control model and the control algorithms. Moreover, the improved control method has higher control accuracy.
non-cooperative target; line-of-sight coordinate frame; finite-time control; RBF neural network; backstepping; input constraint
10.11918/j.issn.0367-6234.201511076
2015-11-20
国家自然科学基金(61304005, 61174200);高等学校博士学科点专项科研基金 (20102302110031)
马广富(1963—),男,教授,博士生导师
孙延超, sunyanchao@hit.edu.cn
V448.2
A
0367-6234(2017)04-0008-08
