无人直升机多功能离合器设计与试验
2017-04-19孙荣哲大连浦州航空科技有限公司
孙荣哲大连浦州航空科技有限公司
无人直升机多功能离合器设计与试验
孙荣哲
大连浦州航空科技有限公司
针对小型无人直升机传动系统的动力传递与断开要求,设计了一种具有超越功能的离心式离合器。与原发动机附带离合器相比,该离合器结构简单、性能可靠、重量轻、具有单向传动功能(超越功能)等优点。
离心离合器 超越
0 引言
由于活塞发动机具有耗油率低、起动方便、加速性好、技术成熟、成本低等优点,广泛应用于小型无人机。为保证发动机在低负载工况下启动,多在发动机动力输出端安装启动离合器。当发动机启动后,启动离合器按整机要求接合离合器,传递转矩。为增加飞机安全性,直升机多在传动系统中安装超越离合器,其目的是当发动机在高空发生故障突然停车时断开传动,旋翼不必驱动已经熄火的发动机,直升机可以依靠旋翼系统的惯性自转下滑着陆,减少伤亡和损失。
启动离合器以离心式离合器居多,其常用机构如图1所示。内环装在发动机输出主轴上,与发动机主轴同步转动。离合块被弹簧紧压在内环上,可以沿圆柱销径向滑动,依靠圆柱销传递转矩。当发动机启动和怠速时,转速较低,摩擦块离心力小于弹簧的向心合力,摩擦块上蹄片与外环完全分离。随着发动机转速逐渐提高,离合块的离心力逐渐增大,当离心力大于弹簧力时,离合块沿圆柱销向外移动与外环接触,开始传递转矩。当离合块与外环之间的摩擦力(离心力与弹簧向心合力差乘以摩擦系数)乘以外环的半径得到的转矩大于发动机输出扭矩时,离合器完全接合。在额定工作转速下应保证离合器最大转矩传递能力大于发动机转矩,安全系数取n>1.5,防止离合器打滑。
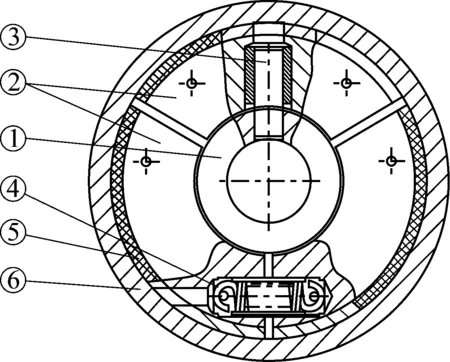
① 内环 Inner ring;② 离合块 Centrifugal block;③ 圆柱销 Cylindrical pin;④ 弹簧 Spring;⑤ 蹄片 Shoe;⑥ 外环 Outer ring
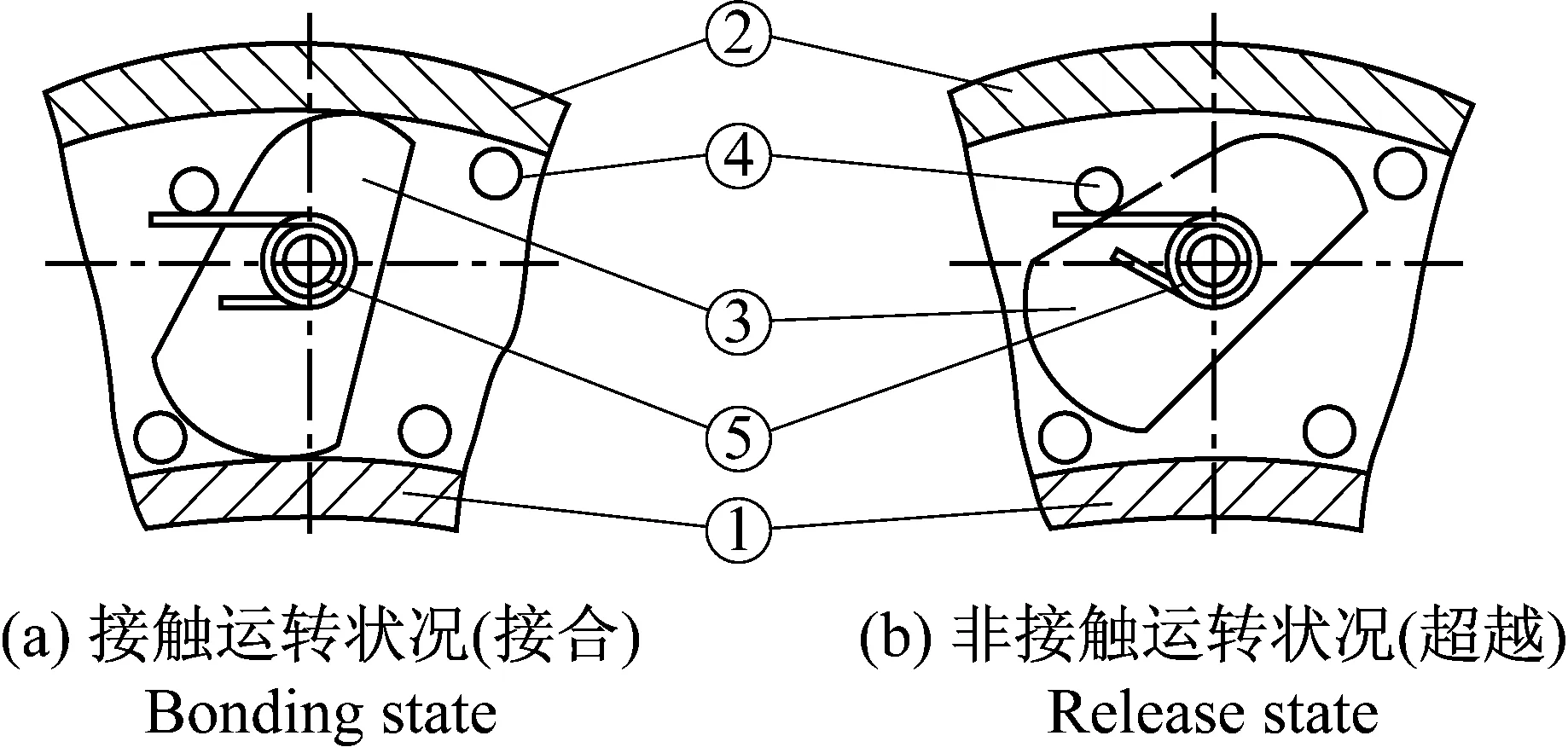
直升机上使用的超越离合器以楔块式为主,其结构如图2所示。楔块为实现超越功能的主要零件,其原理见图3所示。以内环主动顺时针旋转为例,当内环转速大于外环转速时,楔块在弹簧力,摩擦力的作用下楔紧内外环并自锁,离合器为接合状态。当内环转速小于外环转速,楔块在摩擦力的作用下克服弹簧力,内外环脱离,离合器为超越状态,不能传动转矩。
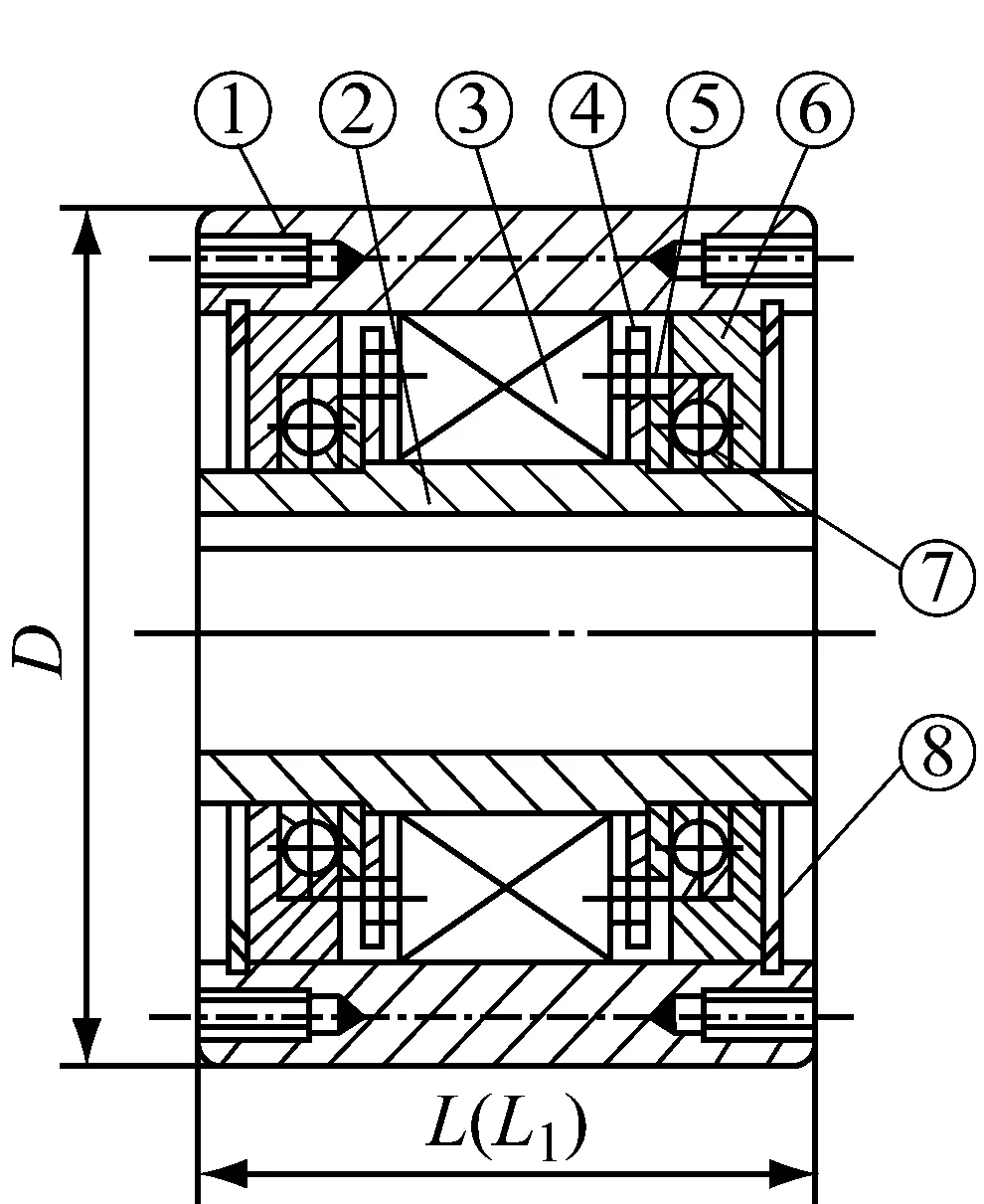
① 外环 Outer ring;② 内环 Inner ring;③ 楔块 Wedge;④ 挡销 Stop pin;⑤ 弹簧 Spring
直升机同时使用了以上两种离合器来实现不同工况下动力传动的接合与脱离要求。两种离合器的结构也比较相近,都使用了内环与外环,内外环之间为功能元件。由此而产生一个设计课题:能否使用一种离合器同时得到两种功能,达到减少重量,简化结构的目的?
本文阐述了一种离合器的设计方法,在离心式离合器的基础上增加了连杆机构,利用压力角原理实现正反向力矩差,实现超越功能。
1 指标要求
根据某小型直升机总体设计要求,离合器要求如下:
离合器重量:<3 kg;
发动机怠速:1900~2100 r/min,此范围内离合器完全脱离;
过渡接合转速:2200~3000 r/min,此范围内离合器逐渐啮合,要求过渡平稳;
额定工作转速:5500 r/min,此时离合器工作储备系数1.7~2.2;
超越状态转矩:<5 kNm。
2 设计原理与结构
如图4所示,利用压力角的正向增矩与反向卸载原理,正常工作状态与发动机突然停车状态的Ft(外环对离合器块的摩擦力)方向相反,造成离合器块与外环间的压力不同,导致离合器块与外环间的最大摩擦力不同。
图中及公式中符号含义为:Fr离合块离心力;Fs弹簧合力;Fp外环对离合器块的正压力;Ft外环对离合器块的摩擦力;Fl连接板拉力(或推力);α压力角;R离合器半径;f摩擦系数;M正向最大转矩;M’反向最大转矩。
当发动机正常工作驱动负载时,最大转矩状态力平衡方程为
Fp+Fs-Fr-Fl×sinα=0
M=Ft×R=Fp×f×R
Ft=Fl×cosα

(1)
当发动机突然熄火,被动旋转时,Ft与Fl反向,此时力平衡方程为:
Fp+Fs-Fr+Fl×sinα=0

(2)
由(1)、(2)式可以得到结论:只要tanα足够大就可以得到足够大的M和足够小的M’。在额定转速下,当发动机突然熄火时,旋翼等元件在惯性力的驱动下继续旋转,驱动发动机。一旦离合器的反向驱动转矩M’小于发动机固有的被动转矩,离合器将发生滑动,发动机转速将会迅速降低,而离合块的离心力与发动机转速的二次方成正比(Fr=ω2r),从而导致M’的进一步降低,离合器将彻底分离。
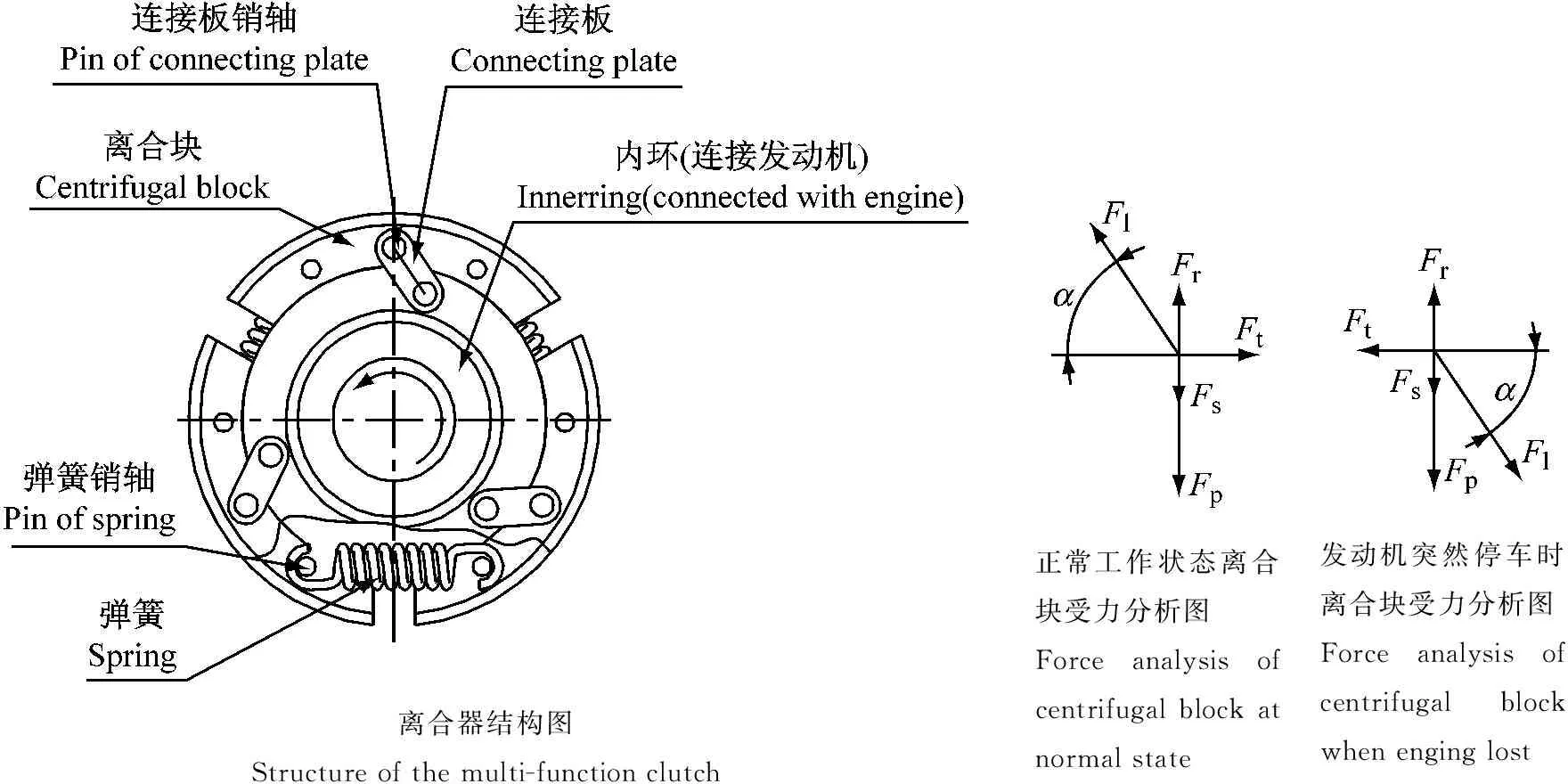
离合器结构图Structureofthemulti-functionclutch正常工作状态离合块受力分析图Forceanalysisofcentrifugalblockatnormalstate发动机突然停车时离合块受力分析图Forceanalysisofcentrifugalblockwhenenginglost
3 具体参数计算选定
已知:发动机转矩曲线及反向驱动时的转矩,如图5所示,额定转速(5500 r/min)下发动机最大转矩为68 Nm,反向驱动转矩为65.5 Nm,取工作储备系数为1.88(同原离合器)。得:M=127.84 Nm,M’=65 Nm。再将(1)式与(2)式相除可得:
离合器半径:R=45 mm
离合块质量:m=0.178 kg
离合块质心半径:r=34 mm
弹簧合力Fs=430 N;
单个弹簧预紧力Fs1=248 N。
利用MATLAB函数计算和绘图功能将发动机转矩曲线、发动机被动转矩曲线、原离合器转矩曲线以及本设计离合器正向与反向转矩曲线绘制成图5。从图5上我们可以看出新设计的离合器正常工作状态与原离合器基本一致,曲线基本重合。而发动机突然停车时,旋翼等惯性部件反向驱动发动机,这时离合器可传递转矩小于发动机被动转矩。从而导致发动机转速迅速降低,离合器完全脱离。
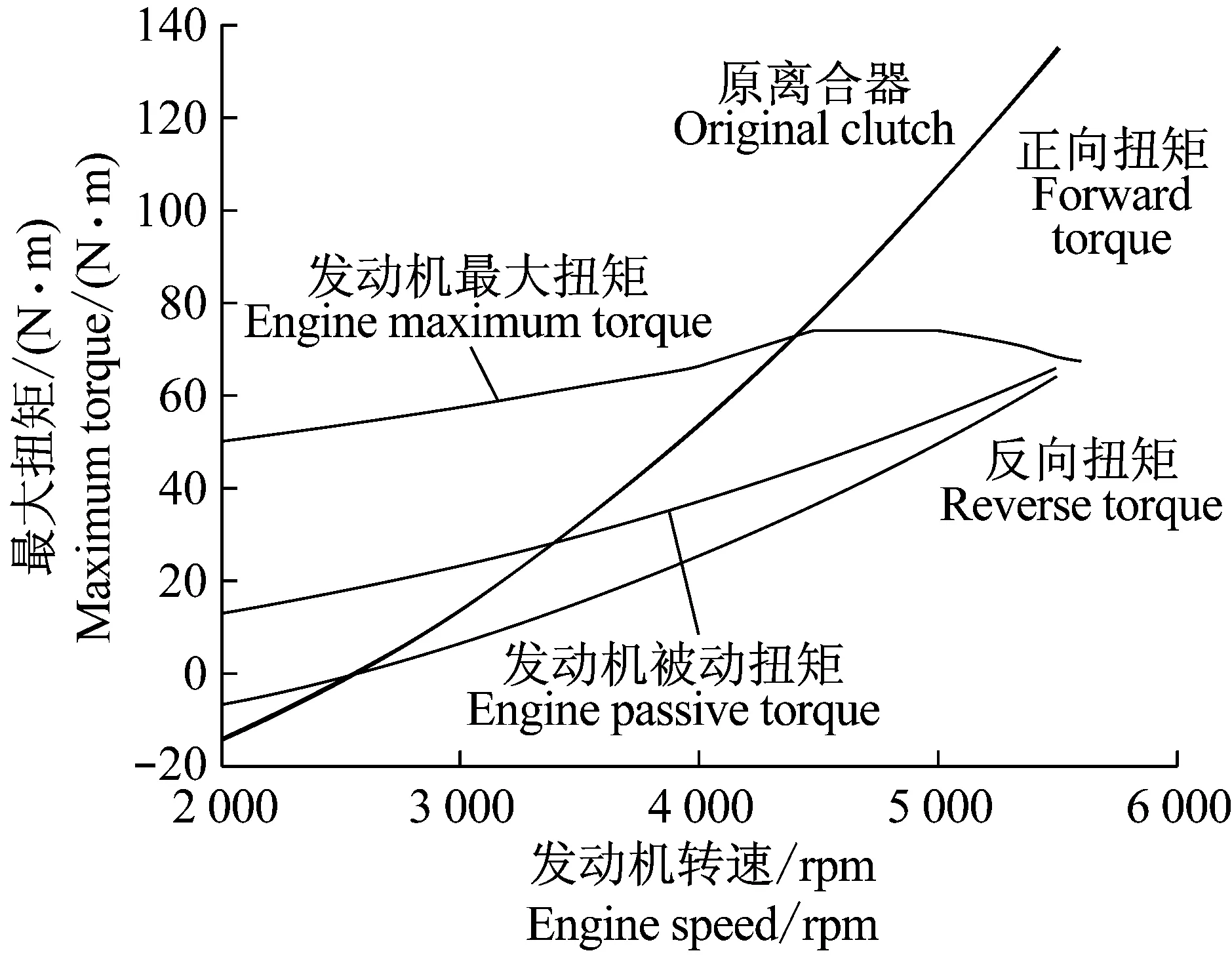
图5
4 产品试验验证
按计算结果设计离合器,结构如图4所示。试制产品安装于无人直升机。发现额定转速下发动机突然停车时,实测离合器脱离转速为5400 r/min,与理论计算(立即脱离)不符,怀疑其原因为摩擦系数偏小。通过调整连扳长度(见图4)调节压力角为53度,调节后装机试验,实测数据绘制工作过程转速图并与原离合器比较如图6、图7、图8所示。
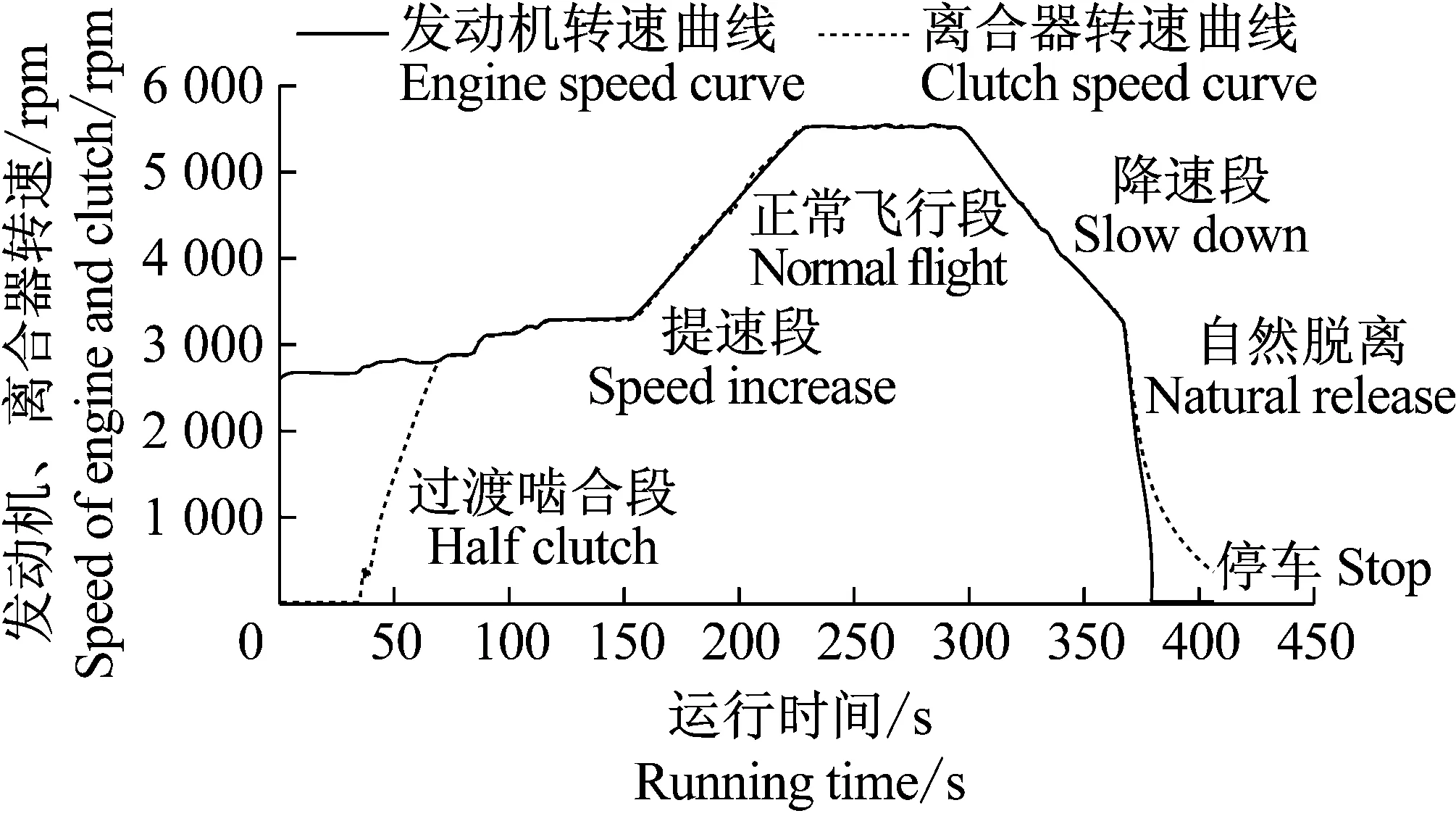
图6 正常工作过程转速曲线(原离合器)

图7 发动机突然停车转速图(原离合器)
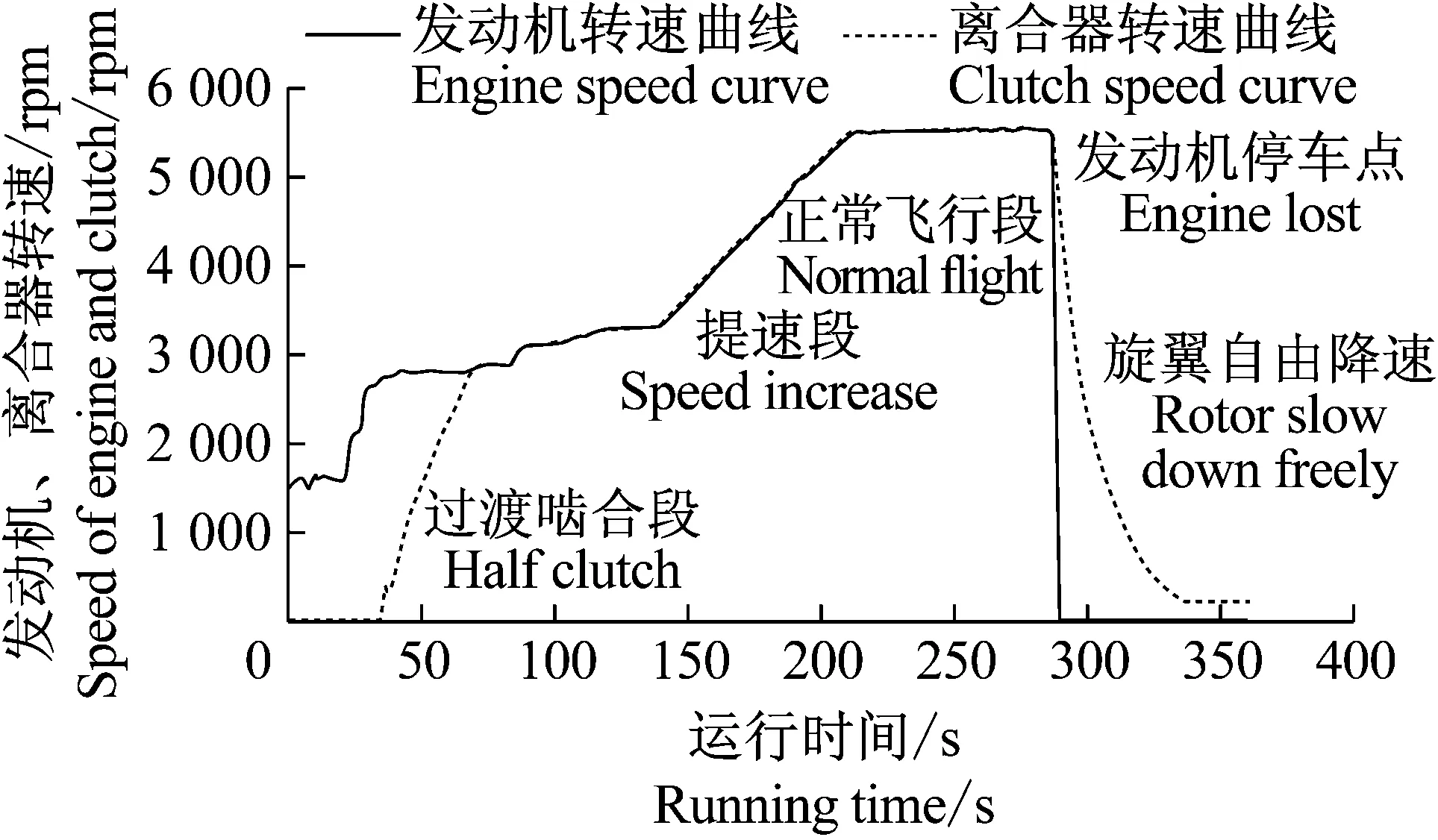
图8 发动机突然停车转速图(自研离合器)
图6所示为安装原离心离合器,未安装超越时,发动机正常工作一个任务循环转速实测数据曲线。发动机怠速2600 r/min,此时离合器外环不转。当发动机转速为2800 r/min时,离合器外壳转速逐渐提高(斜线向上)直至转速一致,完全接合。正常飞行段曲线完全重合,说明离合器接合可靠,没有打滑现象。当发动机转速逐渐下降时,两曲线保持重
合。在3200 r/min转速时,应为发动机被人为设定怠速,所以曲线出现拐点,发动机与离合器外环转速急剧下降,下降至2800 r/min时离心离合器脱离,离合器外环被旋翼及传动系统的惯性驱动逐渐自由降速;发动机转速迅速降至怠速2400 r/min(热车怠速比刚启动时稍低),然后被停车。
图7所示为安装原离心离合器,未安装超越时,发动机在额定转速时突然停车时的转速实测数据曲线。曲线前半段基本与图6相同,飞机工作正常。在飞机运行300秒时发动机突然停车。发动机与离合器外环转速急剧下降,下降至2800 r/min时离心离合器脱离,离合器外环被旋翼及传动系统的惯性驱动逐渐自由降速;发动机转速迅速降至0。
图8所示为安装自研的具有超越功能的离合器,发动机在额定转速时突然停车时的转速实测数据曲线。曲线前半段基本与图6、图7相同,飞机工作正常。在飞机运行285秒时发动机突然停车。离合器内外环迅速脱离,离合器外环被旋翼及传动系统的惯性驱动逐渐自由降速;发动机转速迅速降至0。
结论:该离合器在发动机正常工作时,具备了离心式离合器的功能,保证发动机的正常启动以及额定工作转速时的飞行可靠。在发动机突然故障停车时,该离合器能够迅速脱离,使旋翼处于自由状态,以保证直升机自转着陆要求。
自研离合器最终参数如下:
离合器重量:1.2 kg;比原离心离合器轻0.42 kg;
发动机怠速时离合器完全脱离;
过渡啮合转速:2500~2800 r/min,过渡平稳;
额定工作转速:5500 r/min,此时离合器工作储备系数1.79;
超越扭矩:0 Nm
(完全脱离)。
自研离合器完全达到设计指标要求,满足整机要求。
[1] 《机械设计手册》第二卷,主编 成大先。化学工业出版社,2002.
[2] 《CFL楔块超越离合器结构及应用》朱春梅,孔炜。起重运输机械,2005.
Multi-function clutch design and test of unmanned helicopter
SunRongzhe
PANWOOAviationTechnologyCo.,Ltd
In order to meet the demand of the Transmission System of Helicopter, I designed a multi-function clutch. The clutch have the function of centrifugal clutch and overrunning clutch. Compared with original clutch which is a accessory of engine, The clutch has following advantage of simple structure, steady performance, light-weight and multi-function.
centrifugal clutch overrunning
1006-8244(2017)01-028-04
孙荣哲,大连浦州航空科技有限公司,
V233.1+2
B
