光纤振动传感系统相位调制模块的嵌入式设计*
2017-04-13吴瑞东谭晋隆靳宝全
吴瑞东,王 宇,王 东,谭晋隆,刘 昕,靳宝全*
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,太原030024; 2.山西煤层气(天然气)集输有限公司,太原030032)
光纤振动传感系统相位调制模块的嵌入式设计*
吴瑞东1,王 宇1,王 东1,谭晋隆2,刘 昕1,靳宝全1*
(1.太原理工大学新型传感器与智能控制教育部与山西省重点实验室,太原030024; 2.山西煤层气(天然气)集输有限公司,太原030032)
针对光纤振动传感系统测试与标定环节缺乏便携式振动信号驱动装置的问题,设计了一款基于FreeRTOS和STemWin嵌入式系统的压电陶瓷相位调制模块。该模块使用STM32嵌入式微控制器,结合H桥功率驱动对信号进行功率放大。利用FreeRTOS嵌入式操作系统进行多任务功能部件开发,并设计了STemWin人机交互界面。随后搭建分布式光纤振动传感系统对嵌入式相位调制模块进行测试,结果表明该模块可实现驱动信号频率、占空比、输出极性和电压的调节,并可在总长为11.769 km的传感光纤上对冲击信号进行实时采集,且振动信号定位误差在41 m以内,从而可满足各类光纤振动传感系统在长距离不同位置处进行振动测试与标定的需求。
光纤传感;振动检测;嵌入式系统;相位调制
分布式光纤振动传感系统因其成本低、抗电磁干扰、耐腐蚀、系统灵敏度高等优点,在实际中得到了广泛应用[1-4]。在传感系统调试期间与振动检测标定阶段,需要对传感光纤施加类型不同和频率各异的外界模拟振动信号来测试传感系统对振动信号的响应能力。
光纤传感系统中模拟振动信号的传统产生方法有,采用连杆缠有纸条的电机来拍打传感光纤,用于模拟外界规律性的低频扰动[5];在铺有光纤的地表上进行形式多样、频率混杂的人为外界扰动,比如行走、奔跑、敲击和跳跃等[6];利用音响的扬声部件在较窄的频段范围内影响传感光纤的状态[7]。以上方法在振动频率范围方面都有一定的局限性,而现有的光纤传感系统多采用具备宽频率范围动态输出的压电陶瓷(PZT)技术[8-11],由信号发生器输出固定频率的电信号,利用压电效应驱动相应的PZT模块产生振动。PZT模块通过调制光纤中传输光束光相位的方法,来实现对缠绕在压电陶瓷表面传感光纤的扰动激励。
然而,在分布式光纤振动传感系统中,需要在较长距离的不同位置处来施加多组扰动信号进行系统测试与标定。一般的仪器设备不便于携带且不能够保证输出的稳定性。因此,本文设计了一款基于FreeRTOS和STemWin嵌入式系统开发技术的PZT相位调制模块[12]。采用具有触摸功能的STemWin人机交互界面,以控件方式更改输出信号的频率、占空比、输出极性和驱动电压,再经信号功率放大后驱动PZT相位调制模块产生所需的扰动信号,从而可用于分布式光纤振动传感系统的调试与标定。
1 嵌入式相位调制模块的硬件设计
嵌入式相位调制模块的硬件系统如图1所示,主要由嵌入式系统、人机交互界面和信号功率驱动系统三部分组成。嵌入式系统完成信号输出、数控电源控制、人机交互界面显示控制及触摸响应的功能;人机交互界面显示当前工作状态和触摸面板信号转换功能;数控电源由嵌入式系统控制,输出不同的电压值;功率驱动系统在嵌入式系统控制下,完成对信号输出的放大和极性转换。

图1 嵌入式PZT相位调制模块硬件框图
嵌入式系统采用意法半导体公司型号为STM32F407的微控制器,具有1 Mbyte的程序存储空间和192 kbyte的程序运行空间,且配有丰富的外设接口。内核通过片内高级外围总线 APB (Advanced Peripheral Bus)连接到片内外设定时器2,配置其中的程序计数器和输出比较寄存器后,程序计数器在内核时钟的作用下开始计数,每次计数的结果与比较寄存器比较的结果作为脉冲宽度调制PWM(Pulse-Width Modulation)信号进行输出。同时选用微控制器的两个普通端口DIR0和DIR1来实现对功率驱动系统的极性控制,并且通过通用同步异步收发器 USART(Universal Synchronous Asynchronous Receiver Transmitter)与数控电源建立通信,向数控电源发送控制指令,完成对功率驱动系统中驱动电压VCC的调节。人机交互界面采用微控制器内部集成的灵活静态存储控制器 FSMC (Flexible Static Memory Controller)总线连接方式向液晶屏发送控制命令及显示数据。人机交互界面中的触摸信号选用四线制串行外设接口 SPI(Serial Peripheral Interface)完成与触摸芯片的通信,获取液晶屏触摸位置信息并对其进行响应。
图2为信号功率驱动系统框图,输入信号为极性控制信号DIR0、DIR1和驱动信号PWM,两个输出端口Vout1和Vout2分别与PZT相位控制模块相连。输入信号DIR0、DIR1和PWM经逻辑与门后连接至可控制 MOSFET闭合状态的双路半桥驱动器IR2184,4个MOSFET通过串并联方式连接驱动电压VCC和GND,从而构成H桥驱动电路,实现PZT驱动电压的开关控制与极性控制。

图2 信号功率驱动框图
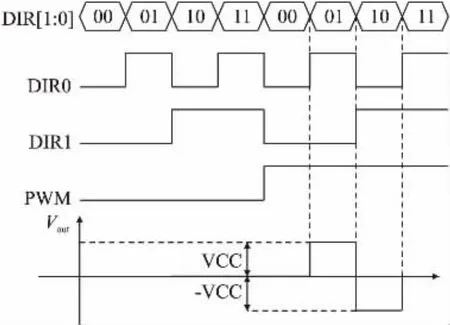
图3 信号功率驱动逻辑转换
图3为信号功率驱动的逻辑转换图,其中信号DIR[1:0]为DIR0与DIR1的逻辑组合,信号Vout为图2中输出端口Vout1和Vout2的电压差。由逻辑转换结果可知,当DIR[1:0]端口为逻辑00和逻辑11时,Vout不受PWM端口控制且输出恒为0;当DIR[1:0]端口为逻辑01时,Vout为正向电压且与驱动电压VCC相同;同理可得,当DIR[1:0]端口为逻辑10时,Vout为反向电压且其绝对值与驱动电压VCC相同。因此,系统可通过控制DIR0和DIR1端口的输出电平来实现输出电压Vout的极性变换,并且通过改变PWM端口电平来实现输出电压Vout的通断控制。
2 嵌入式相位调制模块的软件设计
嵌入式相位调制模块的软件设计采用嵌入式FreeRTOS操作系统,其中包含STemWin触摸控制、STemWin主界面显示、PWM参数调整3个核心任务。
图4为嵌入式相位调制模块软件框图,软件总体架构基于嵌入式FreeRTOS操作系统,其中由FreeRTOS内核完成多任务调度。在总体软件设计中,共有3个核心任务。其中,STemWin触摸控制任务用于读取液晶屏触摸位置信息,并将位置发送至STemWin主界面显示;STemWin主界面显示任务在获取触摸位置信息后,完成对整个界面的显示、响应与刷新;PWM参数调整任务依据用户触摸输入的控制参数来调整PWM驱动信号的频率、占空比、输出极性和驱动电压。
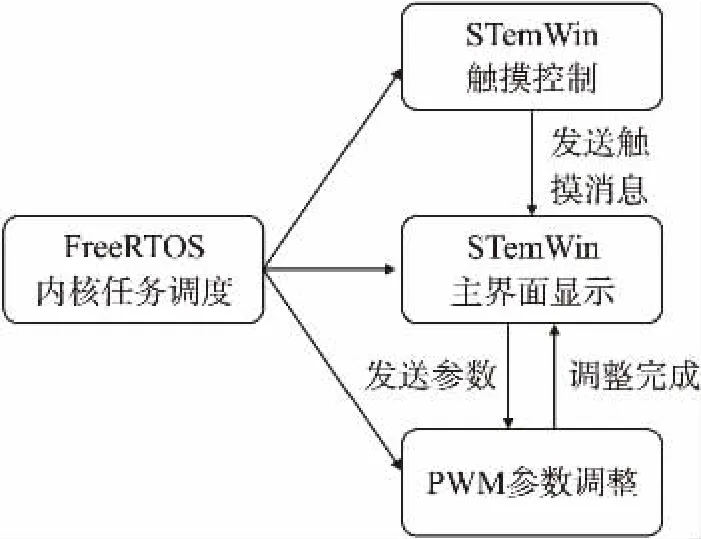
图4 嵌入式相位调制模块软件框图
软件程序流程图如图5所示。上电默认PWM输出为低电平,即信号功率驱动输出为零,系统初始化完成后在FreeRTOS内核循环调度下各个任务开始运行。在 PWM 输出过程中,由于选用STM32F407内部的TIM2定时器,其中TIM2内部与输出频率和占空比相关的寄存器为:预分频器PSC (Prescaler)、自动重装载寄存器ARR(Auto Reload Register)和捕获比较寄存器CCR(Capture/Compare Register),若用MPSC、MARR和MCCR分别表示以上寄存器值的大小,则PWM输出频率fout可表示为:

式中:Fmain为定时器计数的主时钟频率。
PWM输出占空比W可表示为:

因此,对PSC、ARR和CCR寄存器赋予不同数值,便可实现不同频率、不同占空比的PWM输出调节。

图5 软件程序流程图
3 系统测试结果
3.1 分布式光纤振动传感系统
为了验证嵌入式相位调制模块的输出特性,实验室搭建了基于萨格奈克-马赫泽德干涉原理的分布式光纤振动传感系统,其光路示意图如图6所示。将部分传感光纤缠绕在PZT管,经由相位调制模块控制PZT管,模拟外界振动作用于传感光纤,在光弹效应下,光束在传感光纤内的光相位将随振动发生改变,并在干涉作用下转换为光强变化,因而可经光电平衡探测器将光信号转换为电信号,由数据采集卡完成振动数据的实时采集,最终实现评估相位调制模块工作性能的功能。

图6 分布式光纤振动传感系统示意图
分布式光纤振动检测的原理如下:当有振动信号作用于传感光纤时,在采集到的原始光强时域信号的频谱中,周期出现的幅值极小值点与振动位置存在如下关系[13]:

式中:fnull为幅值极小值点对应的频率值,c为光在真空中的传播速度,n为光纤的纤芯折射率,L为振动位置距光纤末端的长度,k为正整数,因而(2k-1)一项表明周期性出现的频率值fnull的大小呈现奇数倍关系。
由式(3)可知,可通过寻找频域上周期性幅值极小值点对应的频率值来定位振动发生的位置,振动位置的表达式如下:

因此,分布式光纤振动传感系统可以实现对光纤外界振动信号的实时检测与定位,也可以对设计的嵌入式相位调制模块的输出特性进行验证与标定。
3.2 相位调制模块输出测试
嵌入式相位调制模块设计实物如图7所示。其中包含有具备人机界面的嵌入式系统、数控电源、信号功率驱动系统和表面缠绕有传感光纤的PZT管。嵌入式系统上电显示人机交互界面,界面中的3个滑块分别用于调节PWM信号的输出占空比、输出频率值和输出电压幅度,“参数调整”按钮用于更新PWM参数,“极性反转”按钮用于反转输出极性,“输出控制”按钮控制PWM的通断。
现任意选择占空比为5%,频率为100 Hz,电压幅度为12 V,并开启PWM输出。利用示波器查看嵌入式系统PWM端口的输出波形,以及经信号功率驱动后的波形,结果如图8所示。
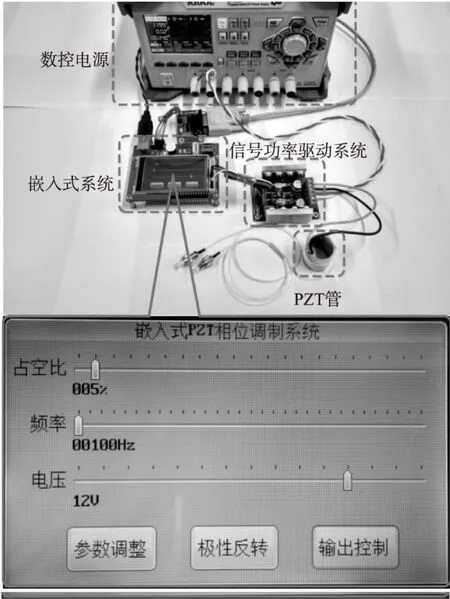
图7 PZT相位调制模块实物图

图8 PWM输出波形
由图8可知,嵌入式系统输出PWM信号幅值为3.3 V,脉冲重复周期为10 ms,与系统设定的100 Hz输出频率相对应,脉冲宽度为0.5 ms,与系统设定的5%占空比相对应。信号功率驱动输出与PWM信号相比,幅值由3.3 V放大至12 V,频率和占空比保持不变,从而实现对PWM信号的放大功能。
3.3 振动信号测量结果
将图7中PZT管表面缠绕的光纤接入至图6传感光纤部分,依据3.2节内容对嵌入式系统进行PWM参数设置,由数据采集卡采集到的时域信号如图9所示。
在图9中可观察到两个冲击信号,其间隔为10 ms,与嵌入式系统所输出的PWM信号周期一致。结果表明,由嵌入式相位调制模块驱动的PZT管所产生的振动激励信号,能够改变传感光纤中的光相位并被分布式光纤振动传感系统检测到,进而由数据采集系统实现对振动信号的还原。
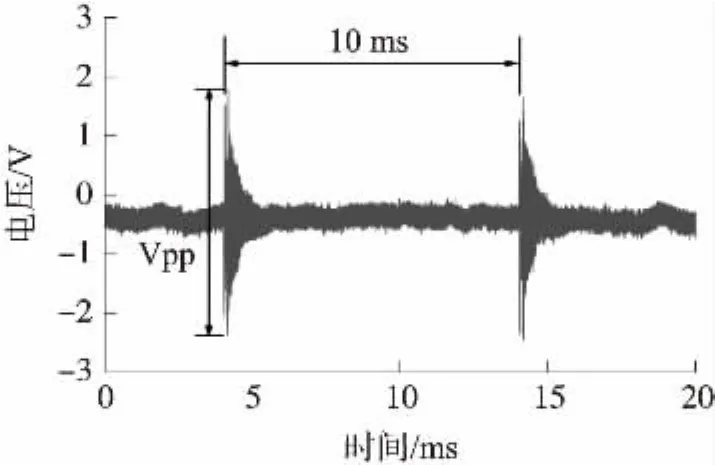
图9 振动下探测器输出波形
本模块具有更改驱动电压大小的功能,可方便测试目标光纤传感系统对振动感知的灵敏度。设定图9中单个冲击信号作用下所探测到最大值与最小值差为Vpp,更改功率驱动系统的驱动电压,得到不同驱动电压下Vpp变化曲线,如图10所示。

图10 不同驱动电压下Vpp变化曲线
为了验证嵌入式相位调制模块功能的完备性,将采集到的时域信号变换到频域,在频域中求取周期性幅值极值点所对应的频率值,并代入式(4)计算出振动位置。
实验中所用延迟光纤长度为4.177 km,传感光纤总长度为11.769 km,在距离光纤末端5.15 km处进行测试,数据采集卡的采样频率为10 m/s。对采集到的时域信号进行快速傅里叶变换,并放大0~60 kHz区间内的频谱信息,可得振动位置处的频谱曲线分别如图11所示。
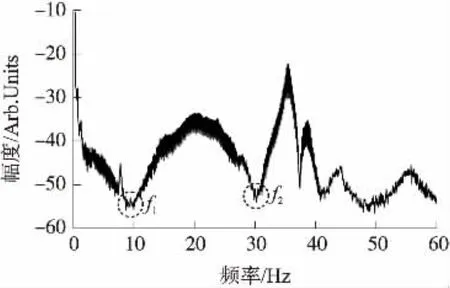
图11 振动信号的频域曲线
由图11可得,对应于5.15 km处振动信号的频谱曲线中存在2个与振动位置相关的幅值极值点(f1和f2)。f1和f2对应频率值为9.84 kHz和29.72 kHz,其大小近似为3倍关系,与式(3)结果近似一致。代入式(4)可得,f1和f2对应的定位结果分别为5.191 km和5.156 km,相应的定位误差分别为0.041 km和0.006 km。
4 结论
本文设计了一款基于FreeRTOS和STemWin嵌入式系统开发技术的PZT相位调制模块,可用于分布式光纤传感系统的振动检测标定与调试阶段。硬件设计采用STM32作为嵌入式微控制器,利用四片MOSFET构成的H桥功率驱动对信号进行功率放大。软件设计采用FreeRTOS嵌入式操作系统建立多任务功能部件,并利用STemWin设计人机交互界面以提高模块易用性。随后搭建基于萨格奈克-马赫泽德干涉原理的分布式光纤振动传感系统,对PZT相位调制模块进行振动检测实验,结果表明模块可调整驱动信号的频率、占空比、输出极性和电压,并可对模拟的冲击信号进行实时采集。在总长为11.769 km的传感光纤测试实验中,振动的定位误差最大为0.041 km,可以满足各类型光纤振动传感系统对振动测试与标定的需求。
[1] 李凯彦,赵兴群,孙小菡,等.一种用于光纤链路振动信号模式识别的规整化复合特征提取方法[J].物理学报,2015,64(5): 54304-054304.
[2] Wang B,Pi S,Jia B,et al.Location Performance Fading for Multiple Disturbances in Distributed Sagnac Optical Fiber Interferometer[J].Microwave and Optical Technology Letters,2015,57(10):2294-2298.
[3] 黄新锐,王广祯,侍海峰,等.分布式光纤振动传感系统大传感数据流时间周期压缩与传送技术[J].传感技术学报,2015,28 (10):4.
[4] 韩玲娟,王强,杨其华,等.基于分布式光纤传感的水下输气管道泄漏检测与定位分析[J].传感技术学报,2015,28(7):1097-1102.
[5] 范登华,刘永智,张利勋.一种具有迈克耳逊结构的新型光时域反射仪[J].红外,2009,30(6):35-38.
[6] 林蕾,陈伟民,章鹏,等.基于附加环结构的分布式光纤传感系统研究[J].光子学报,2009,38(5):1118-1121.
[7] 贾俊.基于Sagnac干涉仪管线传感器干扰检测定位技术研究[D].北京:北京交通大学,2008.
[8] 刘勇,周喃,朱震,等.压电陶瓷光纤相位调制控制系统的研制[J].量子电子学报,2008,25(3):379-384.
[9] 刘相果,蹇胜勇,蒋洪平,等.基于PZT陶瓷谐振技术的光纤相位调制器研究[J].压电与声光,2011,33(5):699-701.
[10]张超,段发阶,蒋佳佳,等.光纤压电陶瓷相位调制系统及其在线标定[J].光电工程,2011,38(6):89-92.
[11]刘泊,郭建英,孙永全.压电陶瓷微位移驱动器建模与控制[J].光学精密工程,2013,21(6):1504-1509.
[12]李一鸣,荣军,王岳斌,等.一种简易红外通信装置的设计与实现[J].电子器件,2015,38(6):1385-1392.
[13]Wang He,Sun Qizhen,Li Xiaolei,et al.Improved Location Algorithm for Multiple Intrusions in Distributed Sagnac Fiber Sensing System[J].Optics Express,2014,22(7):7587-7597.

吴瑞东(1992-),男,河南许昌人,硕士研究生,主要研究方向为光纤传感器,wuruidong0881@link.tyut.edu.cn;

王 东(1985-),导师,男,安徽庐江人,博士,讲师,主要从事光电信息与仪器工程等方面的研究,wangdongwind @gmail.com;

靳宝全(1972-),男,通讯作者,山西代县人,博士,教授,研究方向为光纤传感器,jbq_007@163.com。
Embedded Design of Phase Modulation Module for Optical Fiber Vibration Sensing System*
WU Ruidong1,WANG Yu1,WANG Dong1,TAN Jinlong2,LIU Xin1,JIN Baoquan1*
(1.Key Laboratory of Advanced Transducers and Intelligent Control Systems,Ministry of Education and Shanxi Province,Taiyuan University of Technology,Taiyuan 030024,China;2.Shanxi CBM(NG)Gathering and Transportation Co.,Ltd.,Taiyuan 030032,China)
In order to solve the problem of a lack of portable vibration signal driving device for the test and calibration of optical fiber vibration sensing system,a PZT phase modulation module based on FreeRTOS and STemWin embedded system is proposed in this paper.In this module,STM32 is utilized as the embedded microcontroller and the H bridge power driver is designed to amplify the signal.Multi-task functional component is developed in FreeRTOS embedded operating system and the STemWin graphical user interface is designed,a distributed optical fiber vibration sensing system is then constructed to test the embedded phase modulation module.The experimental results show that the frequency adjustment,duty cycle,output polarity and voltage of the driving signal can be realized by the proposed module.Over a total fiber length of 11.769 km,the shock signal is acquired in real time and the positioning error of vibration signal is within the range of 41 m,which can meet the needs of test and calibration for all kinds of optical fiber vibration sensing system at different positions in a long distance.
optical fiber sensing;vibration detection;embedded system;phase modulation
TP211+.6;TP23
A
1004-1699(2017)02-0200-06
C:1290B
10.3969/j.issn.1004-1699.2017.02.006
项目来源:山西省回国留学人员科研项目(2016-035);国家自然科学基金项目(51375327,51504161);山西省煤基重点科技攻关项目(MQ2014-09)
2016-08-05 修改日期:2016-09-27
