变桨距四旋翼飞行器控制系统设计*
2017-04-13姚佳乐沈宏君张虹波
姚佳乐,沈宏君,张虹波
(宁夏大学 物理与电子电气工程学院,宁夏 银川 750021)
变桨距四旋翼飞行器控制系统设计*
姚佳乐,沈宏君,张虹波
(宁夏大学 物理与电子电气工程学院,宁夏 银川 750021)
变桨距四旋翼飞行器是通过改变旋翼的桨距大小来改变升力的,这种控制策略可使飞行器姿态的响应和控制的延迟都会小很多,同时可以节省资源和能耗。通过分析对比变桨距与传统的变转速四旋翼飞行器的结构和飞行原理,根据其数学模型和控制要求,设计了变桨距四旋翼飞行器的控制系统。该系统采用STM32F427微处理器作为主控制器,使用MPU6000等惯性测量单元及其他传感器用于检测飞行器的位置、姿态;基于四元数方法进行姿态解算;利用PID控制算法对飞行器姿态、高度进行闭环控制。试飞结果表明,变桨距四旋翼飞行器能够稳定飞行,满足系统要求。
变桨距四旋翼飞行器;四元数;姿态解算;PID
0 引言
传统四旋翼飞行器是一种电动的、能够垂直起降的多旋翼飞行器,与常规的旋翼式直升机相比,其结构更为紧凑,能够产生更大的升力,并且4只旋翼可以相互抵消反扭力矩,不需要专门的反扭矩桨[1]。四旋翼飞行器还拥有体积更小、机动性能更灵活、飞行区域更广泛的特点,尤其是在某些危险区域或环境恶劣的条件下,仍然能正常工作,因此,在军事和民用领域都被作为研究的热点。
传统四旋翼飞行器是通过改变螺旋桨的转速来控制姿态与运动,因此需要四个电机同时工作。而新型的变桨距四旋翼飞行器在不失传统四旋翼飞行器优点的前提下,避免了转速调节带来的弊端,大大提高了机动性、可控性和响应速度[2];而且,变桨距四旋翼飞行器只需要控制一个电机的转速,通过传动机构将转速传到4个螺旋桨上,改变桨距控制飞行器完成各种动作,减轻自身重量的同时,还可以节省能耗,提高续航时间,增大任务载荷。在以后的研究中更可以将电机用发动机来代替,大大提高续航时间,从根本上解决目前传统四旋翼飞行器续航时间极短的缺陷。
本文基于STM32F427微处理器,采用MPU6000惯性测量模块、气压高度计、GPS等传感器,构建了变桨距四旋翼飞行器控制系统。
1 传统变转速四旋翼飞行器与变桨距四旋翼飞行器结构与飞行原理的对比
两种四旋翼飞行器的结构如图1所示,其形状基本相同,都是将4个旋翼分别安装在“+”字形架结构的4个顶点处,可将其分为上下,左右两组。相邻的两个旋翼,旋转方向相反,从而抵消反扭力矩。传统四旋翼飞行器的4个旋翼分别与4个电机相连,如图1中的M1、M2、M3、M4所示,螺旋桨具有固定桨距,飞行过程中只需改变4个旋翼的转速即可实现各种复杂运动。而变桨距四旋翼飞行器只有1个位于机体中心部位的主电机,如图1中的M0所示,4个旋翼下方没有安装电机,而是被变桨距机构代替,如图1中的P1、P2、P3、P4所示,螺旋桨的桨距可变。主电机通过传动系统将转速传递到旋翼上,并通过控制转速和桨距来控制四旋翼飞行器完成各种动作。
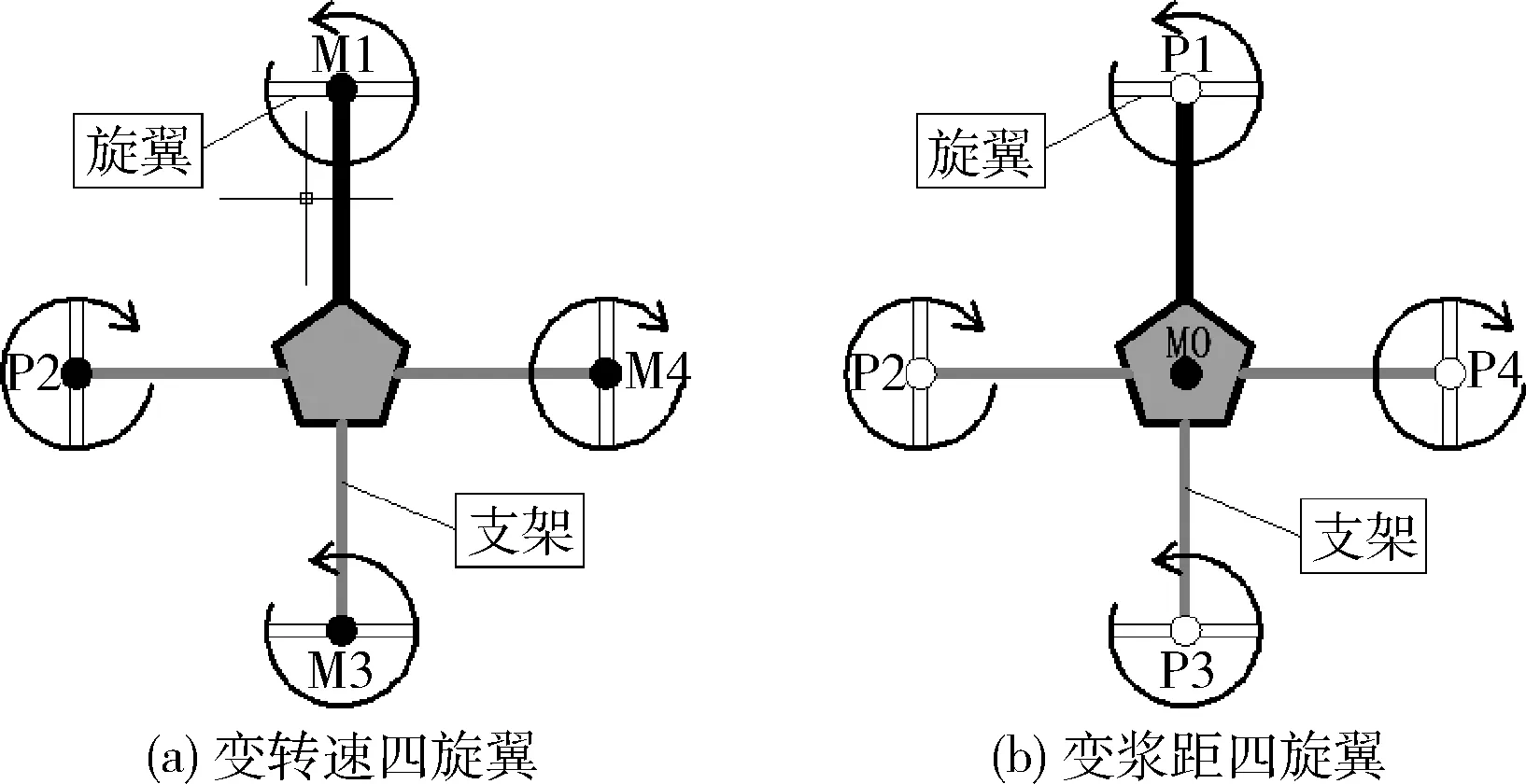
图1 变转速四旋翼飞行器与变桨距四旋翼飞行器的结构对比
变桨距四旋翼飞行器的飞行原理如图2所示,其中虚线为升力方向,当4个旋翼的桨距相等且所产生的升力之和等于飞行器自身重力时,飞行器处于悬停状态;在悬停的基础上,将飞行器的任意一组旋翼桨距等量增大或减小而保持另一组旋翼的桨距不变,飞行器将做偏航运动;等量控制4个旋翼桨距增大或减小,飞行器将向上或向下运动;当其中1个旋翼桨距增大或减小,其对角线上的旋翼桨距等量地减小或增大时,飞行器将向旋翼桨距减小的一侧倾斜,产生俯仰运动或者滚转运动。传统的四旋翼飞行器则是通过增大或减小电机的转速来控制升力的大小,从而完成相应的动作。
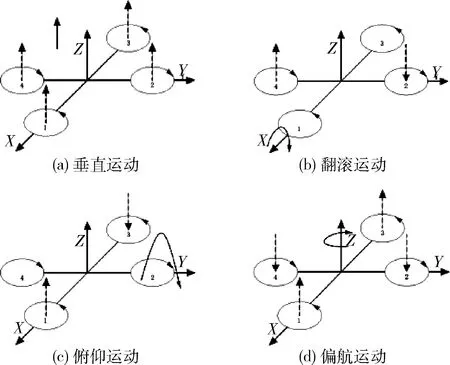
图2 变桨距四旋翼飞行器飞行原理
2 控制系统总体设计
变桨距四旋翼飞行器的控制系统具有6个自由度,即3个自由度的方向估计和3个自由度的位置估计,系统具有强耦合和不稳定等特点,除了受到自身结构和空气动力学的影响外,也很容易受到外界干扰[3]。变桨距四旋翼飞行器的姿态是通过调节4个旋翼的桨距大小进行调整的,飞行器的主控制模块将各种传感器采集到的信息进行姿态解算,得到飞行器当前的姿态信息。利用PID控制算法,调节主电机的转速和变桨距旋翼的桨距大小,从而使飞行器保持稳定姿态。
(1)
变桨距四旋翼飞行器控制系统的总体设计如图3所示,包括主控制器、各种传感器模块、电源模块和执行机构等。飞行器的主控制模块采用的是意法半导体公司的32位STM32F427微处理器,它集成了市场上容量最高的闪存和更大的SRAM,同时还提供更多的通信接口和增强型安全功能,拥有同级产品中最低功耗,所有这些特性有助于加快软件研发周期,提升应用性能,最大限度延长电池寿命。主控制器是整个控制系统的核心,它负责这整个传感器的数据采集、飞行的姿态解算、控制算法的运行以及控制执行机构的输出。传感器模块由惯性测量单元、气压高度计和GPS等构成,其中惯性测量单元用来检测飞行器姿态信息,GPS和气压高度计则确定飞行器的高度、飞行速度以及位置等信息。由于GPS在低空的环境下对高度的检测达不到目标要求,因此利用气压高度计进行补偿处理。电源模块主要由电池、电源电压检测模块、蜂鸣器和LED指示灯构成,当系统电压小于报警值或出现错误时,通过蜂鸣器和LED指示灯进行示警,以保证飞行安全的需要。执行机构则包括一个主电机和4个变桨距模块,主电机提供恒定的转速,控制飞行器的基本速度,变桨距机构则是利用直升机的变桨距原理,通过舵机带动螺旋桨改变桨距大小来保持飞行器的姿态或控制飞行器完成不同的动作需要。
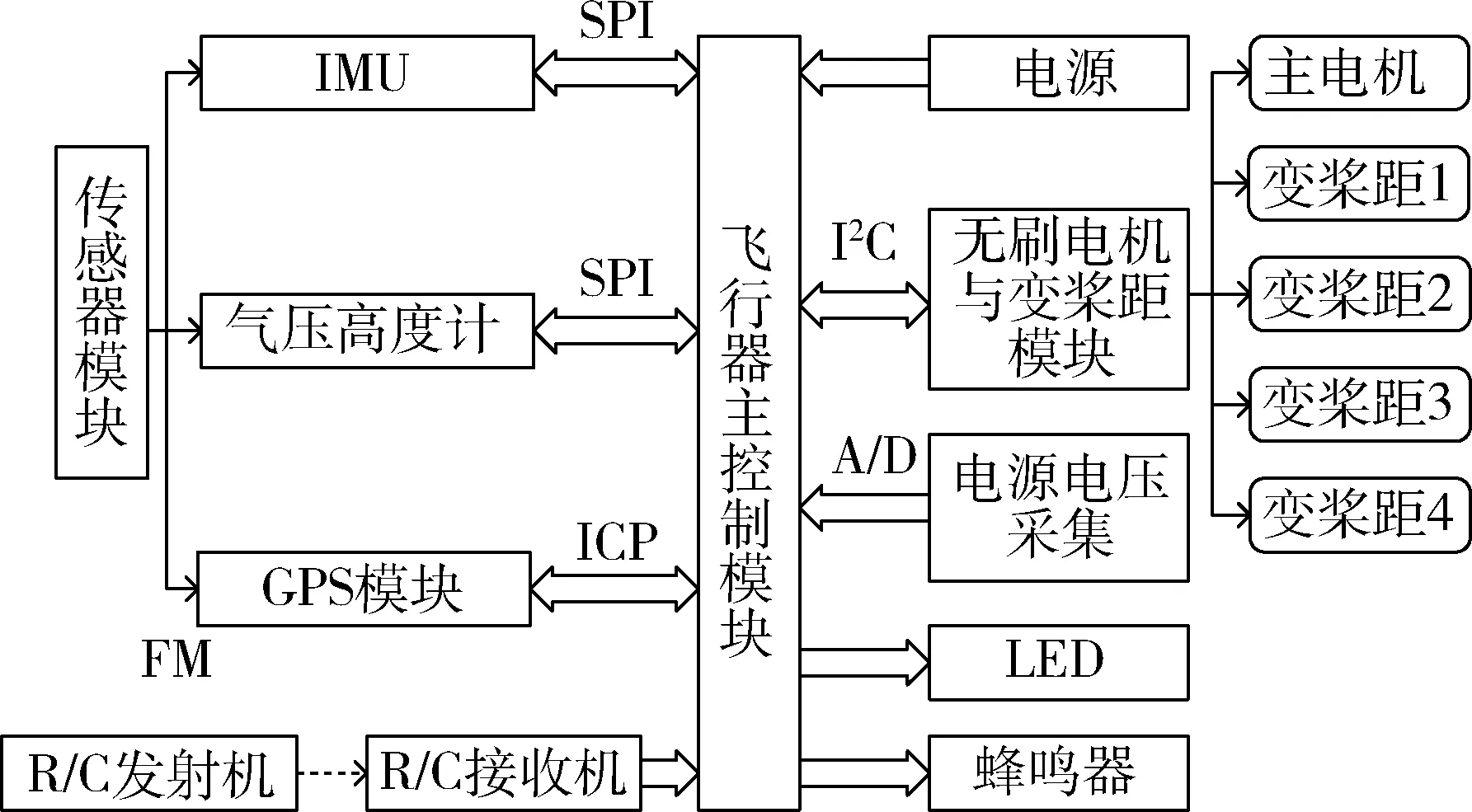
图3 变桨距四旋翼飞行器控制系统总体设计
3 基于四元数方法的姿态解算
设飞行器的航向角为ψ(将北偏东定为正方向),俯仰角为θ,横滚角为γ,取地理坐标系g为导航坐标系,并规定xg、yg、zg的指向依次为东、北、天,则机体坐标系b与导航坐标系n(即地理坐标系g)的关系如图4所示。

图4 机体坐标系(b)与导航坐标系(n)旋转示意图
由该图可得经过三次基本旋转后对应的坐标变换阵:
(2)
设向量在机体坐标系中的坐标为xb、yb、zb,在导航坐标系(n)中的坐标为xn、yn、zn,则该向量的坐标变换公式为:
(3)

图5 姿态双闭环PID控制流程图
依欧拉定理,可将式(1)用四元数表示为:
(4)
即得到方向余弦矩阵:
(5)
比较式(2)和式(5),可从方向余弦矩阵转换为欧拉角[4]:
θ=sin-1(T32)——俯仰角pitch
(6)
通过式(6)即可得到飞行器的姿态。在使用传感器检测姿态时要注意:有些传感器由于精密度不足会产生仪器误差,因此在使用前需要做校准以提高测量精度;陀螺仪在长时间采集角速度时会产生漂移现象,还需要使用磁力计和加速度传感器的值进行修正,才能得到较为准确的姿态信息。
4 PID控制
目前常用的对四旋翼飞行器进行姿态控制的算法主要有三种:Backstepping算法[5]、滑模控制算法[6]和PID控制算法[7]。由于PID控制算法相比较其他两种算法控制起来更简单,范围更广,因此本文采用PID控制算法对变桨距四旋翼飞行器进行姿态控制。
当四旋翼飞行器正常飞行时遇到强风等外力影响或受到磁场干扰时,加速度传感器或磁力计采集的数据会受影响产生失真,造成欧拉角解算错误,如果只用角度环单独控制,系统很难保持稳定姿态,让飞行器平稳飞行。因此,可以引入角速度作为内环,角速度是由陀螺仪采集数据,数值一般不会受外界干扰,回复速度快,可以增强系统的鲁棒性。变桨距四旋翼飞行器的姿态双闭环PID控制如图5所示。其中r(t)表示期望的欧拉角,y(t)表示解算出的欧拉角,r1(t)表示期望的角速度,y1(t)表示输出的角速度,PID的输出为桨距变化,通过改变舵量带动螺旋桨的桨距变化,从而改变升力,使飞行器进行自稳调节。
变桨距四旋翼飞行器的高度闭环PID控制如图6所示。其中r(t)表示期望的高度,y(t)表示通过气压高度计和GPS相互补偿后计算出的高度,PID输出为油门值,通过控制电机的转速,保持飞行器在期望高度上飞行。

图6 高度闭环PID控制流程图
本文采用的是位置式数字
PID
控制:
(7)

在将积分量,微分量离散化得到PID计算公式,式中T为更新时间:
(8)
5 实验验证
在硬件系统设计、加工完成的基础上,成功搭建好了变桨距四旋翼飞行器样机。将电控硬件与飞行器连接好后进行了相应的飞行测试。主要包括飞行器姿态解算、PID控制姿态稳定和高度、样机试飞等相关实验。
实验结果表明,该控制系统能够通过遥控器控制变桨距四旋翼飞行器较为稳定的悬停,并实现传统四轴飞行器的基本动作,对变桨距四轴飞行器的姿态和高度的控制性能基本满足设计要求。
6 结论
本文通过对比传统变转速四旋翼飞行器与变桨距四旋翼飞行器的结构与飞行原理,根据其数学模型和控制要求,将性能较高的STM32F427微控制器作为系统的核心控制器,使用MPU6000惯性单元、气压高度计、GPS等传感器,设计了变桨距四旋翼飞行器的控制系统。使用四元数的方法对飞行器的姿态进行解算,并利用PID控制算法,通过控制桨距和转速的输出值,实现了变桨距四旋翼飞行器的稳定飞行和定高控制,并通过试验飞行进行了验证。同时,其为后续深入研究变桨距四旋翼飞行器自动控制系统打下良好的研究基础。
[1] 聂博文.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[2] 蒋回蓉,邓志诚,祝明,等.变桨距四旋翼飞行器的建模与控制研究[J].电光与控制,2015,22(10):48-50,55.
[3] 刘峰,吕强,王国胜,等.四轴飞行器姿态控制系统设计[J].计算机测量与控制,2011,19(3):583-585,616.
[4] 秦永元.惯性导航[M].北京:科学出版社,2006.
[5] 赵元伟,卢京朝.四旋翼飞行器的建模及基于反步法的控制[J].科学技术与工程,2013,13(34):10425-10430.
[6] 尤元,李闻先.四旋翼无人机设计与滑模控制仿真[J].现代电子技术,2015,38(15):80-83,86.
[7] 李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版),2012,31(1):114-117.
Design of control system for quadrotor aircraft with variable pitch
Yao Jiale,Shen Hongjun,Zhang Hongbo
(School of Physics & Electrical Information Engineering, Ningxia University, Yinchuan 750021, China)
Quadrotor aircraft with variable pitch controls lift force by changing the pitch of the rotors. This kind of control strategy can make the spacecraft attitude control response and the delay much smaller, at the same time it can save resources and energy. By analyzing and comparing variable pitch with the traditional variable speed four-rotor aircraft, according to the mathematical model and control requirements, this paper designs a variable pitch quadrotor control system. The system takes STM32F427 microprocessor as the main controller, and uses MUP6000, inertia measurement unit and the other sensor for detection aircraft of location and attitude; achieves posture solver based on quaternion method; uses PID control algorithm for aircraft attitude and altitude closed-loop control. Test results show that the variable pitch quadrotor can fly smoothly and the system can meet the requirements.
quadrotor aircraft with variable pitch; quaternion; posture solver; PID
宁夏大学研究生创新项目项目(GIP201606)
TP273
A
10.19358/j.issn.1674- 7720.2017.06.023
姚佳乐,沈宏君,张虹波. 变桨距四旋翼飞行器控制系统设计[J].微型机与应用,2017,36(6):77-79,83.
2016-10-27)
姚佳乐(1992-),通信作者,男,硕士研究生,主要研究方向:无人机控制系统设计。E-mail:1191256039@qq.com。
沈宏君(1970-),男,博士,教授,主要研究方向:光子晶体,计算电磁学。
张虹波(1972-),女,硕士,副教授,主要研究方向:物联网。