两种高频信号注入法与坐标系结合的无位置传感器运行研究*
2017-04-08关振宏
杜 平, 关振宏, 王 涛, 张 羽
(西南交通大学 电气工程学院, 四川 成都 610031)
两种高频信号注入法与坐标系结合的无位置传感器运行研究*
杜 平, 关振宏, 王 涛, 张 羽
(西南交通大学 电气工程学院, 四川 成都 610031)
基于空间凸极效应的原理,讨论了采用旋转高频电流信号注入到估计的同步旋转坐标系,以及脉振高频电流信号注入到两相静止坐标系中,在永磁同步电机(PMSM)无位置传感器运行控制中的应用。分别给出了两种新结合的高频注入方法的转子位置估计数学模型,指出了获取转子空间位置的解调方法,并应用这两种新结合的高频电流信号注入方法,建立了PMSM无位置传感器矢量控制系统的仿真模型,并进行了仿真比较。仿真结果表明,采用脉振高频电流信号注入与两相静止坐标系结合的方法,具有易于实现的系统控制结构和更优的转子位置估计性能。
无位置传感器; 高频电流注入; 转子位置; 同步旋转坐标系; 两相静止坐标系
0 引 言
近年来,由钕铁硼等稀土永磁材料构成的永磁同步电机(Permanent Magnet Synchronous Motor, PMSM),以高能量密度和转矩惯量比,不需外加励磁等优点,在电力牵引、航空航天、电动汽车等控制场合得到了广泛的应用[1-3]。为保证基于空间矢量调制的PMSM完成磁场定向和速度闭环控制,常采用光电编码器等硬件电路来获取电机所必不可少的转子位置信息,但机械式传感器的安装带来系统的成本和维护负担增加[4-5]。因此为了防止PMSM出现转子短暂反转或起动失败的现象,国内外研究机构对PMSM的无传感器转子位置估计技术展开了深入的研究[6-8]。
目前,PMSM的无位置传感器控制技术主要分为两大类: 一类为基于电机凸极效应的高频注入法;另一类为基于电机基波模型估算反电动势获取转子空间位置的方法[9]。文献[10]提出一种对幅值和相位分别进行自适应补偿的算法,但该方法在电机静止和低速时作用失效。基于脉振高频信号注入法,文献[11]提出同时使用交-直轴高频响应电流作为转子位置估计的解调信号来源,但需离线测定电机凸极率和转子位置角存在的补偿关系。为实现宽转速范围内的估计,文献[12]提出一种旋转高频注入法和反电动势法结合的无位置传感器控制技术,但滞环切换法存在过渡不平滑的问题。
尽管已有很多文献对旋转高频注入法和脉振高频注入法进行了分析与研究,但仅针对旋转信号与两相静止坐标系,脉振信号与估计的同步旋转坐标系的结合[13-15]。采用旋转高频电流注入法结合估计的同步旋转坐标系与脉振高频电流注入法,结合两相静止坐标系的无传感器估计方法,其实现技术缺乏必要的研究和讨论。因此,本文就上述两种新的注入方式和坐标系的结合,推导了基于两种新结合的注入方法的电机高频数学模型,搭建了仿真试验模型,并进行了新控制方法的仿真对比研究。
1 基于估计的同步旋转坐标系的旋转高频电流注入法
PMSM采用基于同步旋转坐标系的id=0磁场定向控制。假定旋转的高频电流信号注入的角频率为ωh,注入幅值为Imh,可表示为
(1)


(2)
式中: p——微分算子。
通过注入式(1)表示的高频电流信号,可得输出高频响应电压为
(3)
其中:
L=(Ld+Lq)/2
ΔL=(Lq-Ld)/2
式中:L——平均电感;
ΔL——半差电感;

f(Δθ)=LPF(udhcosωht+uqhsinωht)=
ΔLImhωhsin(2Δθ)
(4)
当转子位置角误差值极小时,可以认为Δθ≈sinΔθ,即
(5)
2 基于两相静止坐标系的脉振高频电流注入法
采用高频脉振电流信号与两相静止αβ坐标系的结合方法,若注入αβ坐标系中的脉振高频电流信号表示为
(6)
式中:iαh,iβh——分别注入在两相静止αβ坐标轴上的高频电流分量。
在两相静止的αβ坐标系下电机的电压和电流关系可表示为
(7)
式中:uαh、uβh——高频响应电压在两相静止α、β轴上的电压分量;
θr——实际的转子位置。

(8)
由式(8)可知,采用脉振信号注入到两相αβ静止坐标系中,其输出高频电压uαh、uβh分量皆与估计的转子位置θe有关。但在此处,本文只选用uβh做转子位置信息的解调,即
f(θe)=LPF(uβhcos(ωht))=
(9)
3 两种高频注入法的运行比较
为了对比以上研究的两种新结合方法在PMSM无位置传感器控制技术中的估计性能,本文在MATLAB/Simulink中进行了仿真对比研究,其无位置传感器控制结构框图如图1所示。主要电机参数如下: 额定转速n=2000r/min,极对数p=1,定子电阻Rs=2.875Ω,d轴电感Ld=7.2mH,q轴电感Lq=12.5mH,注入频率fh=1.9kHz,注入幅值Imh=0.5A。

图1 高频电流注入法的无位置传感器控制结构框图

图2 n=2000r/min时旋转高频电流注入到估计的旋转坐标系
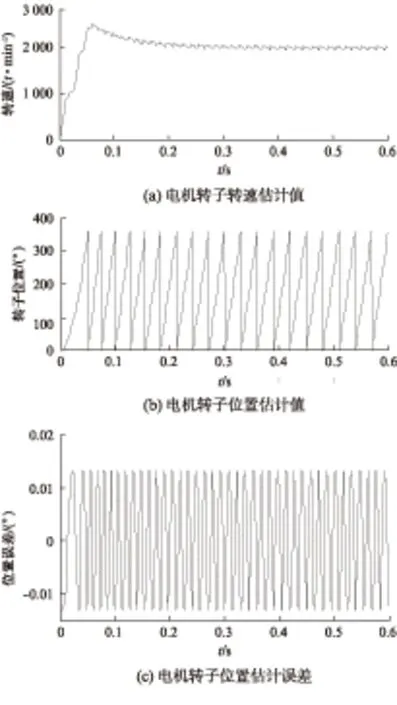
图3 n=2000r/min时脉振高频电流注入到两相静止αβ坐标系

图4 n=100r/min时旋转高频电流注入到估计的旋转坐标系

图5 n=100r/min时脉振高频电流注入到两相静止αβ坐标系
4 结 语
[1] 肖烨然,刘刚,宋欣达,等.基于改进滑模观测器的永磁同步电机无位置传感器I/F起动方法[J].电力自动化设备,2015,35(8): 95-102.
[2] 许波,朱熀秋,姬伟,等.基于FIR优化滤波的旋转高频信号注入法及其应用[J].仪器仪表学报,2012,33(3): 588-595.
[3] 田兵,安群涛,孙东阳,等.基于磁饱和效应的表贴式永磁同步电机初始位置检测方法[J].电工技术学报,2016,31(1): 155-164.
[4] 于艳君,柴凤,欧景,等.基于旋转高频信号法的IPMSM无位置传感器控制[J].电工技术学报,
2013,28(7): 26-31.
[5] 刘毅,贺益康,秦峰,等.基于转子凸极跟踪的无位置传感器永磁同步电机矢量控制研究[J].中国电机工程学报,2005,25(17): 121-126.
[6] 鲁家栋,刘景林,卫丽超.永磁同步电机转子初始位置检测方法[J].电工技术学报,2015,48(7): 24-28.
[7] 王高林,张国强,贵献国,等.永磁同步电机无位置传感器混合控制策略[J].中国电机工程学报,2012,32(24): 103-109.
[8] LIU J M, ZHU Z Q. Novel sensorless control strategy with injection of high-frequency pulsating carrier signal into stationary reference frame[J]. IEEE Transactions on Industry Applications, 2014,50(4): 2574-2583.
[9] 刘刚,肖烨然,孙庆文.基于改进反电势积分的永磁同步电机位置检测[J].电机与控制学报,2016,20(2): 36- 42.
[10] 王冉珺,刘恩海.永磁同步电机转子初始位置的检测方法[J].电机与控制学报,2012,16(1): 62-66.
[11] CHEN J L, LIU T H. An IPMSM position control system using high frequency injection sensorless technique[C]∥IECON 2012—38th Annual Conference on IEEE Industrial Electronics Society, 2012: 3676-3681.
[12] 邱鑫,黄文新,卜飞飞.内置式永磁同步电机宽转速范围无位置传感器直接转矩控制[J].电工技术学报,2014,29(9): 92-99.
[13] LUO X, TANG Q, SHEN A, et al. PMSM sensorless control by injecting hf pulsating carrier signal into estimated fixed-frequency rotating reference frame[J]. IEEE Transactions on Industrial Electronics,2016,63(4): 2294-2303.
[14] AGRAWAL J, BODKHE S. Low speed sensorless control of PMSM drive using high frequency signal injection[C]∥ 2015 Annual IEEE India Conference (INDICON), 2015: 1-6.
[15] WALAMBE R A, JOSHI V A, APTE A A, et al. Study of sensorless control algorithms for a permanent magnet synchronous motor vector control drive[C]∥Industrial Instrumentation and Control (ICIC), 2015 International Conference on, Pune, 2015: 423- 428.
Operation Research on Two Kinds of High-Frequency Signal Injection Method Combined with Coordinate System*
DUPing,GUANZhenhong,WANGTao,ZHANGYu
(School of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
Based on the saliency tracking idea, the rotating high-frequency current signal injected into the estimated synchronous rotating coordinate system and the high-frequency pulsating current signal injected into the two-phase stationary coordinate system, which were used in permanent magnet synchronous motor operation control system without position sensor were discussed. The mathematical models of two new high-frequency injection method in rotor position estimation strategy were presented and the spatial position of the rotor demodulation principles using the two new combined high frequency injection method were established. Comparative study of simulation results showed that the pulsating high-frequency current signal injection method combination with the two-phase stationary coordinate system had simpler control structure system and better performance of rotor position estimation.
no position sensor; high-frequency current injection; rotor position; synchronous roating reference frame; two-phase stationary coordinate system
国家自然科学基金面上项目(51477146)
杜 平(1992—),男,硕士研究生,研究方向为电力电子与电力传动。 关振宏(1967—),男,副教授,研究方向为电力牵引与传动控制。
TM 351
A
1673-6540(2017)02- 0028- 05
2016-07-13
