快速确定来袭鱼雷距离方法研究*
2017-04-07吴汉云朱清浩臧江涛
吴汉云 朱清浩 臧江涛
(1.海军潜艇学院 青岛 266000)(2.92196部队 青岛 266000)
快速确定来袭鱼雷距离方法研究*
吴汉云1朱清浩1臧江涛2
(1.海军潜艇学院 青岛 266000)(2.92196部队 青岛 266000)
当舰艇处于被来袭鱼雷接近命中态势下,被攻击舰艇可以利用声纳的被动听测方位,结合本舰艇的规避机动,进而采用“快速确定来袭鱼雷距离”方法来隐蔽快速地确定来袭鱼雷的距离。并通过比较绘算值与实际值之间的相对误差,验证了此种方法的可行性。
被动方位; 规避机动; 来袭鱼雷距离
1 引言
针对敌潜艇发射的来袭鱼雷,被攻击舰艇无论采用声抗器材对抗或舰艇机动规避等措施,舰艇长最关注的是如何快速获取来袭鱼雷的距离。如果利用通常的被动听测方位解算来袭鱼雷要素较慢[1~2],没法满足快速获取的紧迫需求;如果采用主动声纳探测鱼雷,将可能暴露本舰艇位置更难以摆脱来袭鱼雷搜索跟踪[3~4];因此,本文将研究一种能够隐蔽、快速确定鱼雷距离的方法。
2 基本原理
来袭鱼雷从敌潜艇发射出管后,首先进行线导导引控制航行,一般距被攻击舰艇3000m~4000m附近处鱼雷断线[5],航行一定时间后主动声自导装置开机搜索目标。根据现有声纳对鱼雷报警的性能,舰艇发现来袭鱼雷的距离一般大于30链[6]。
被攻击舰艇接到鱼雷报警后,保持原速航行10多秒后,发现来袭鱼雷听测方位基本不变,则可认为来袭鱼雷(此时鱼雷航向航速一定)朝向本艇命中接近,被攻击舰艇决定采取机动规避。在规避的同时结合听测方位,通过相应绘算隐蔽、快速的确定来袭鱼雷距离,进而为舰艇合理采取对抗措施提供判断的关键依据。
3 绘算方法
被攻击舰艇以V1水下巡航时,在S1位置上接到声纳鱼雷报警,测得来袭鱼雷方位B1(对应我舷角为Q1),舰艇继续航行发现来袭鱼雷听测方位基本不变,则可判断来袭鱼雷向舰艇接近命中。随后,舰艇于S2点开始以V2转向机动,并在S3点测得鱼雷方位B2(对应我舷角为Q2)。

此外,被攻击舰艇在遭受敌潜艇鱼雷攻击时,舰艇指挥员可根据本舰艇与来袭鱼雷之间的概略态势,采用合适的转向机动来有效规避来袭鱼雷搜索攻击[7~8]。因此,根据舰艇机动转向的不同,可分为“向转”和“背转”两种模型。
1) 舰艇“向转”规避鱼雷的距离方法,如图1所示。

图1 舰艇“向转”规避鱼雷的距离方法

图2 舰艇“背转”规避鱼雷的距离方法
由图1可得,在S2位置点上测得鱼雷的距离如下式所示:
其中:Δt23为我舰艇从S2位置上机动到S3位置上的时间。
2) 舰艇“背转”规避鱼雷的距离方法,如图2所示。
由图2可得,在S2位置点测得鱼雷的距离如下式所示:
4 绘算参数设定
想定被攻击舰艇V1=3节、V2=12节;开始转向的时间为0.5min。来袭鱼雷与舰艇构成接近命中[9],我艇在Q1<70°时“向转”规避,在Q1>70°时“背转”规避,选择转向大小为ΔC、以速度矢量V2航行1min后测得方位为B2。
参考世界现役鱼雷主要性能,想定鱼雷速度VT分别采用45节、40节、35节、30节;舰艇发现来袭鱼雷的距离一般大于30链,因此D1分别采用为60链、50链、40链、30链;Q1分别采用为120°、90°、60°、30°、10°等不同态势情况,ΔC分别为30(右)、60(右)、120(左)、90(左)、70(左),进行标图作业测得实测值D2和Q2;再根据Q2绘出第二方位线,与初始方位线相交于一点,即可得出绘算值D2。由于在左右不同舷别下的绘算方法相同,因此在这不同态势下的Q1均采用左舷值进行分析。
5 结果分析
本绘算方法采用以被攻击舰艇为原心、方位B1为横坐标建立起起相对坐标系。针对上述不同态势情况,按照本绘算方法得到的鱼雷当前距离D2数值如表1~4所示。
根据表1~4数据可以得到:在一定鱼雷速度VT、一定实际距离D1,不同的我舷角为Q1的态势下,绘算值与实际值之间的相对误差曲线如图3~6所示。
从表数据及图曲线对比分析,可以得出:
1) 相对误差随着来袭鱼雷速度VT、实际距离D1、我舷角Q1以及转向角ΔC的变化而不同。
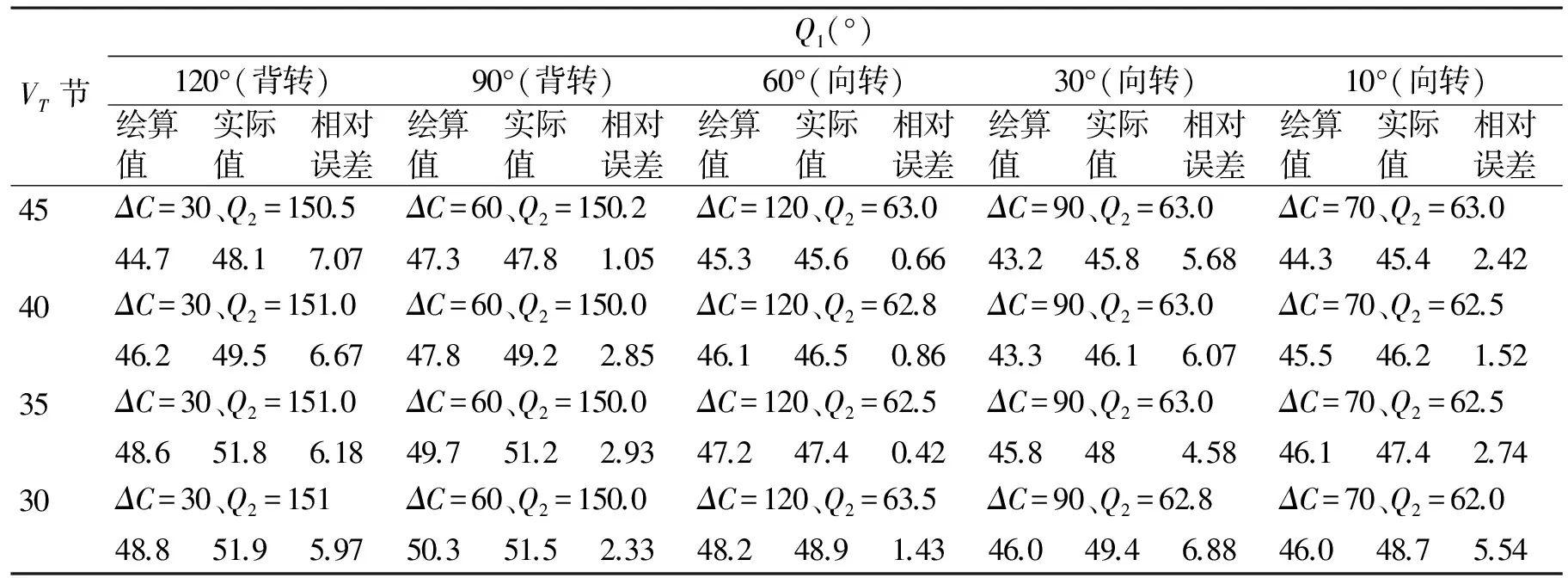
表1 实际D1=60链,绘算当前距离D2(链)

表2 实际D1=50链,绘算当前距离D2(链)

表3 实际D1=40链,绘算当前距离D2(链)
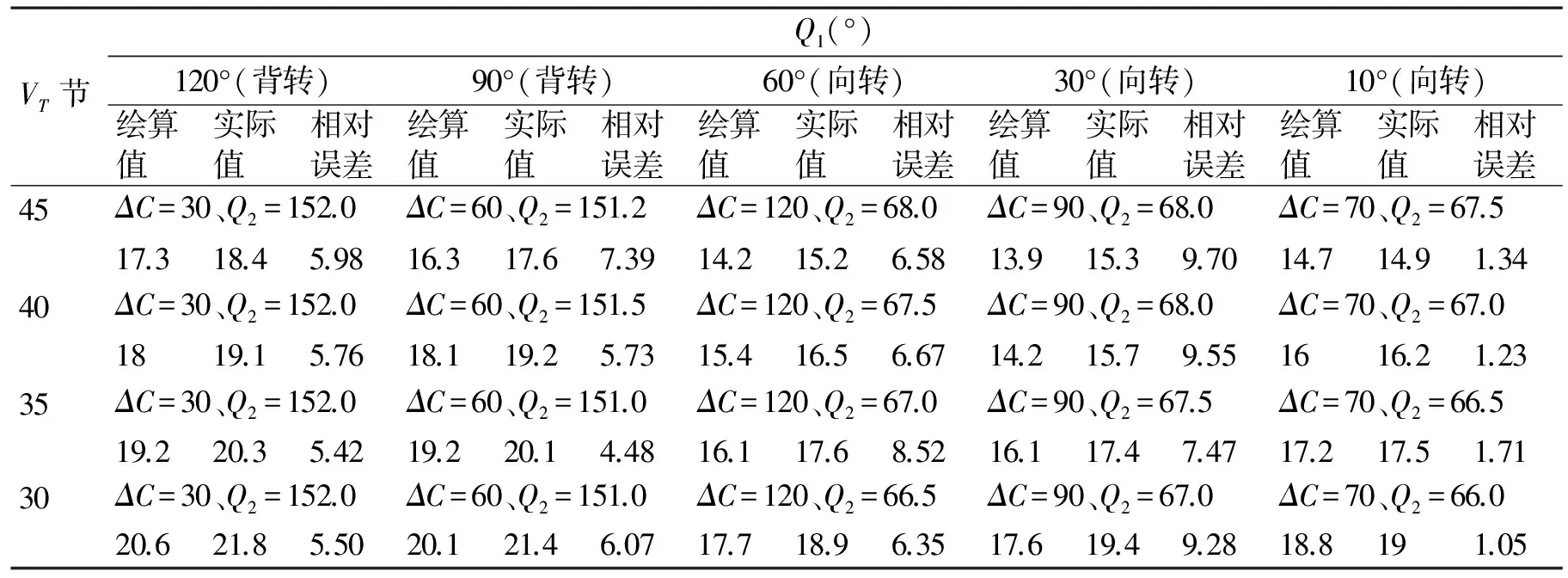
表4 实际D1=30链,绘算当前距离D2(链)
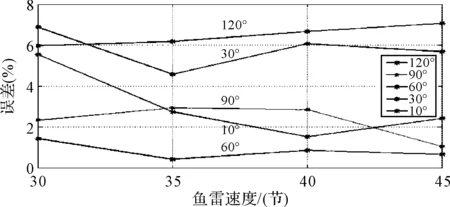
图3 实际D1=60链,绘算值与实际值之间的相对误差曲线图
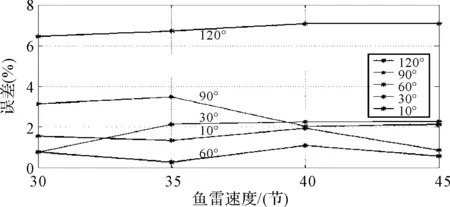
图4 实际D1=50链,绘算值与实际值之间的相对误差曲线图

图5 实际D1=40链,绘算值与实际值之间的相对误差曲线图
图6 实际D1=30链,绘算值与实际值之间的相对误差曲线图
2) 我舷角120°态势下背着转向时,相对误差随着VT的增大而单调增大,且随着D1的减小而单调减小;且与其他态势概略相比,在我舷角120°、实际距离D1为40链以上态势时,其相对误差基本最大。
3) 与我舷角120°态势相比,其余态势情况下基本不成线性变化,但其最大相对绘算误差9.7%,平均相对绘算误差7.35%,满足了我舰艇实际确定来袭鱼雷距离相对误差不超过10%的需要[11],因此,我舰艇在机动规避来袭鱼雷时采用“快速确定来袭鱼雷距离”方法是可行的。
6 结语
本文从满足舰艇“快速准确地确定来袭鱼雷距离”实际需求出发,研究了一种隐蔽快速确定鱼雷距离的方法,为舰艇合理采取对抗措施决策提供依据。虽然,本文也通过相应绘算比较分析,证明了此方法在一定态势下是确实可行的,但只是概略的以70°[10]作为转向的划分界限,实际上关于在不同态势下我舰艇何时转向、向哪方向转向以及转向多大角度最有利于绘算和防御等问题,还有待进一步精确细化分析。
[1] 赵正业.舰艇火控系统原理[M].北京:国防工业出版社,2003.
[2] 夏佩伦.纯方位目标跟踪系统分析[J].舰船论证参考,1991(1):57-64.
[3] 贾跃,宋保维,赵向涛,等.水面舰艇对声自导鱼雷防御机动方法研究[J].火力与指挥控制,2009,1:25-46.
[4] Stuart Henson. Torpedo Countermeasures[J]. Naval Forces,2001,5.
[5] 王树宗.潜用自导/线导鱼雷直航射击功能的战术意义[J].舰船科学技术,2005(1):52-54.
[6] 宗方勇,曹震卿,贾跃.鱼雷航速对舰艇鱼雷报警距离的影响分析[J].鱼雷技术,2011,19(4):260-262.
[7] 王桂芹,刘海光,贾瑞凤.声制导鱼雷反水声对抗技术综述[J].舰船电子对抗,2009,29(3):150-153.
[8] National Imagery and Mapping Agency. Maneuvering board manual fourth edition[J]. National Imagery And Mapping Agency, Bethesda, Maryland. 1984:XV-XIX.
[9] 曹震卿,贾跃.鱼雷航速对潜艇鱼雷报警距离的影响分析[J].舰船科学技术,2011,19(4):260-262.
[10] 王新华,高洪林.舰船反鱼雷技术[J].舰船科学技术,2011,33(9):86-90.
Quick Determination Method the Distance of Incoming Torpedo
WU Hanyun1ZHU Qinghao1ZANG Jiangtao2
(1. Navy Submarine Academy, Qingdao 266000)(2. No. 92196 Troops of PLA, Qingdao 266000)
Under the situation by incoming torpedo hitting closed, the attacked ships can take advantage of the passive bearing, combine with the avoid maneuvering of naval vessels, then the “quickly determine the distance of incoming torpedo” approach is used to seclude and fast determine the distance of torpedo. And by comparing the relative error between the numerical value and the actual value, the feasibility of this method is verified.
passive bearing, avoid maneuvering, distance of incoming torpedo
TJ630
2016年9月16日,
2016年10月20日
吴汉云,男,硕士研究生,研究方向:海军兵种战术理论。朱清浩,男,副教授,研究方向:海军兵种战术理论。臧江涛,男,工程师,研究方向:潜艇攻防。
TJ630
10.3969/j.issn.1672-9730.2017.03.032
