轨道交通车辆牵引控制发展现状与趋势
2017-04-01郭其一康劲松冯江华周桂法
郭其一,康劲松,冯江华,周桂法
(1.同济大学电气工程系,上海 201804;2.中车株洲电力机车研究所有限公司,株洲 412001)
轨道交通车辆牵引控制发展现状与趋势
郭其一1,康劲松1,冯江华2,周桂法2
(1.同济大学电气工程系,上海 201804;2.中车株洲电力机车研究所有限公司,株洲 412001)
从蒸汽机车的出现到现在的交流传动电力牵引,轨道交通车辆牵引控制技术随着牵引动力的发展已历经2个世纪的变革与发展。其技术发展从以牵引装置为中心,发展到现在的以平台化技术为中心的高性能控制技术,实现了牵引控制的通用化、标准化和个性化。由此,完整地讨论了其技术发展过程、现状和趋势。
轨道交通;车辆;牵引控制;现状;趋势
1 国际铁路牵引动力的发展
第二次产业革命的需要与蒸汽机技术的出现,18世纪初世界上第一条铁路应运而生。在最近2个世纪的时间里,铁路列车的牵引动力经历了从蒸汽机、内燃机到电力牵引的变革,其中电力牵引又经历了交直传动到交流传动的发展,牵引控制技术也随之变革。
1879年世界第一台电力机车和1881年第一台城市电车开始尝试直流供电牵引方式;1891年西门子试验了三相交流直接供电、绕线式转子异步电动机牵引的机车;1917年德国又试制了采用劈相机将单相交流供电变换为三相交流电的试验车;1955年水银整流器机车问世,标志着牵引动力电传动技术实用化;1957年,硅可控整流器的发明,标志着电力牵引跨入了电力电子时代;1965年,交直传动晶闸管整流器机车问世,牵引动力进入交直牵引传动系统时代;20世纪70年代,快速晶闸管出现,采用异步牵引电机、快速晶闸管变流机组、电流—滑差控制方法的交流传动DE-2500内燃机车问世;1983年,采用卧式主变压器、牵引变流器、交流电动机、空心轴万向节传动装置和辅助变流器等技术的世界首批BR120型大功率干线交流传动电力机车的问世,奠定了当代交流机车设计和运行的基本模式[1]。
交流传动系统的优势如下:①网侧采用四象限脉冲变流器,大大减少了供电网的电流谐波分量,可使供电网功率因数近似于1,实现再生制动时品质良好的电能反馈;②通过机车控制电路就能实现异步电机的正、反转及牵引、制动状态的转换,电路简单可靠;③异步电机无换向器,与直流牵引电机相比,相同功率时异步电机重量较轻,体积小,动力转向架簧下部分重量相应减少,可以简化转向架结构;④具有优异的牵引性能和制动特性,有自然防空转和防滑行性能,粘着利用好。
发达国家经过30年的研发、考核与技术更新,已完成了机车车辆直流传动向交流传动的产业转换。TGV、新干线、ICE已经成为铁路现代化和国家综合实力的标志之一。交流传动成为铁路实现高速和重载的唯一选择与发展方向。
2 我国铁路电力牵引技术发展历程
我国坚持走自主研发与技术引进相结合的方式,不断发展进步,电力牵引控制技术发展路径与国际上技术发展路径相类似,经历了交直电传动到交流电传动的发展历程。基于交直传动系统形成“韶山”系列电力机车和东风系列内燃机车,基于交流传动系统形成目前的HX系列机车、CRH系列动车组和高速列车以及系列城市轨道交通车辆。
我国于1958年仿制出第1台参照前苏联H60型的单相引燃管整流器6Y1型电力机车,1968年改名为SS1并小批量生产;1968~1985期间,SS1型机车的速度控制技术发展为变压器极间调压加可控硅整流方式,并批量生产;自主研制成功采用以运算放大器为核心器件的闭环控制SS2型原型车;1979年株洲电力机车工厂和株洲电力机车研究所吸收了SS1和SS2的成熟经验,研制成功采用相控整流和模拟电子控制技术的SS3型机车,并大批量生产;1985年,试制成功我国第1台相控整流8轴货运电力机车SS4,并发展形成了较为完整采用相控整流及调速控制直流传动的4、6、8轴货运、客运系列机车,包括SS3B、SS5(原型车)、SS6、SS4G、SS7等车型。1985/1986年在进口8K和6K机车的同时,同步引进了这些机车的先进技术,在消化吸收与结合中国国情的基础上,自主研制成功了基于计算机 (网络)检测控制电力机车,包括SS8、SS9、SS4B、SS4C、SS6B、SS7B、SS7C等机车,故障诊断技术得到应用。
我国研究交流电传动基础技术并开展原理验证始于20世纪70年代,1996年AC4000交流传动原型电力机车研制成功;合作研制了“蓝箭”交流传动动车组、N J1内燃调车机车、DWA型地铁工程维护车、DJ2型“奥星”电力机车、中原之星电动车组、DF8BJ型“西部之光”内燃机车、中华之星高速动车组、KZ4A型哈萨克斯坦电力机车、多种型号国产化地铁列车等,共计50多台(套)。
2003年铁道部提出中国铁路“跨越式发展”方针,并开始从4个外国企业购买了4个车型的高速列车平台及部分转让技术,同时联合设计了3个型号的大功率交流传动电力机车和2个型号的大功率内燃交流电传动机车 HXD1、HXD2、HXD3、HXN3和HXN5。2008年科技部和铁道部启动了《中国高速列车自主创新联合行动计划》,由于该计划的支持和近30年的研究积累、发展,形成了平台化、模块化、系列化的产品平台。交流传动产品全面覆盖大功率交流传动机车、动车组及城市轨道交通车辆,并实现了大量出口,在国际市场上站稳了脚。中国2列标准动车组在运营线完成了420 km/h的交会试验,将成为我国铁路装备实现重大提升下一代产品。
3 现代列车牵引传动系统控制特点
列车牵引电传动系统的基本任务是通过机电能量转换,达到速度、位置和转矩控制的目的。其本质是电机和变流系统的性能。现代牵引系统采用交-直-交(城轨系统为直-交)电传动形式。牵引设备主要有高压电器(主变压器)、牵引变流器和牵引电机及相关控制系统等。牵引主电路包括网侧电路、(四象限整流电路)直流环节电路和三相逆变电路等。列车的牵引力来源于动轮与钢轨之间的粘着力。轮重、轮轨材料的弹性及在车轮上施加的转矩构成了粘着力的三要素。
列车是以基本动力单元为基础构成的,并可以灵活组合形成不同的编组,以满足不同的运输需求。按照列车动力的动力需求及用途,多动力单元的组合形式有动力集中的机车或固定重联机车、动力分散的动车组或城轨列车以及重载组合列车等。
根据模块化、平台化与结构化思想,列车牵引控制功能可以划分为3个层次,即列车控制级、车辆控制级和传动控制级,如图1所示。牵引控制系统的列车控制级负责整列车的上层控制、状态监测与故障诊断等,主要功能包括:操作端选择与确定逻辑、运行方向及左右侧,牵引和制动指令以及列车速度特性控制、牵引和制动力协同、列车级故障诊断与安全导向、辅助系统控制及记录和信息交互等;车辆级控制实现动力单元内控制、状态监测与故障诊断等;传动控制级实现四象限脉冲整流器、逆变器和异步牵引电动机控制等,主要功能包括牵引变流系统和电机控制、空转与滑行保护控制(或粘着控制)等。
现代列车控制和诊断系统都采用车载网络系统。列车网络系统基本特性主要体现在实时性、确定性、可靠性和安全性(包括安全完整性与信息安全)等;其应用特性主要包括:实现列车动态解编的通信网络初运行,监视数据、过程数据、消息数据、流数据的实现等。
故障诊断与网络系统以及传感技术的结合,使得列车级诊断-车辆级诊断-设备诊断分级诊断综合系统的建立成为现实,并扩展到车地一体化的远程综合系统。

图1 列车牵引分层控制Fig.1 Layered control of train traction
4 现代列车牵引控制系统技术体系

图2 面向工程化产品的列车牵引系统Fig.2 Train traction systems technology for engineering products
面向应用的牵引控制系统如图2所示,其主要包含技术:一是直接面向控制对象的控制技术,包括实现牵引动力单元控制需求的控制技术和控制策略,以及实现多动力单元协同控制需求的车辆级和列车级控制技术;二是保证分布式列车分级控制系统信息传输的通信技术;三是以系统集成技术为总揽,以可靠性、可用性、维护性和安全性RAMS(reliability availability maintainability safety)专项技术提升产品效能,以试验验证技术确保实际产品满足产品技术功能要求的保障技术。
4.1 交流传动牵引控制策略与控制技术
现代列车传动控制理论的基础是现代数学与计算科学、计算机科学、微电子科学以及传感检测理论与控制理论等。网侧控制、电机控制和粘着控制是现代交流传动系统牵引控制的核心,控制策略决定了电传动系统的技术性能。
网侧变流器先后经历了二极管器件不可控整流、相控整流和四象限脉冲整流器3个阶段。四象限脉冲整流器实际上是一个交、直流侧均可控的四象限运行变流装置,其通过多重化等手段可以实现网侧电流的谐波抑制,使得整流器输入电流与输入电压均为高度正弦化,避免谐波对电网的污染。
牵引电机是列车电气传动系统机电能量转换的核心,其控制方法包括异步电机转差频率控制、转子磁场定向矢量控制、异步电机直接转矩控制以及直接自控制等。目前,在列车上开始使用无速度传感器控制技术、永磁牵引电机牵引系统控制技术和优化的列车粘着利用控制技术等。
4.2 列车通信网络技术体系
列车通信网络TCN(traincommunicationnetwork)的基本模型采用开放系统互联OSI(open system interconnection)模型。为了保证过程数据在确定的较小时延下能够被及时发送与确认接收,TCN实时协议省略了网络层、传输层、会话层和表示层,只保留了链路层和应用层;而消息数据按需传输,传输需要建立连接,保留OSI模型中的网络层、传输层、会话层和表示层[2]。
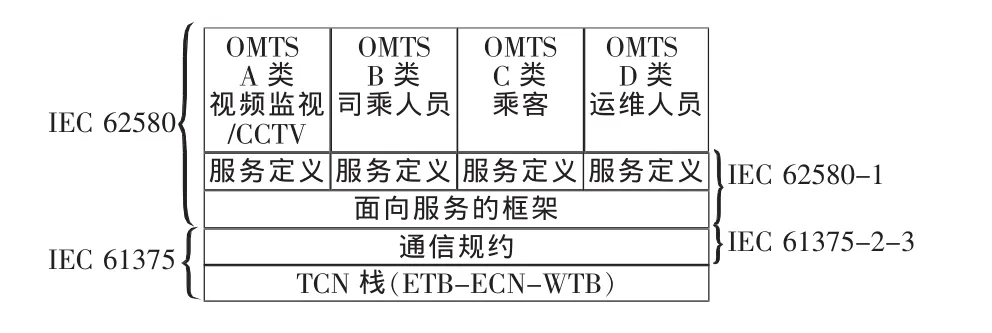
图3 基于列车通信网的OMTSFig.3 OMTS based on train communication network
IEC61375新标准定义了列车级以太网组成网ECN(ethernet consist network)和车辆级以太列车骨干网ETB(ethernet train backbone),IEC62580系列标准首期定义了车载多媒体和信息服务子系统,如图3所示。典型的车地一体化列车通信网络如图4所示。重载组合列车的通信网络需要在原有列车通信网络的基础上增加一个上层的无线通信网络。

图4 车地一体化的列车通信网示意Fig.4 Train-ground train communication network
4.3 RAMS保障技术
RAMS包括可靠性、可用性、维修性和安全性等几个方面。其工程化技术体系是在系统保证计划总体要求的指导下展开的[4]。系统保证计划规划需要开展的RAMS工作、可靠性设计技术包括可靠性建模、可靠性分配和预计等。
以可靠性为中心的维修RCM(reliability centered maintenance)是目前国际上通用的、用以确定产品预防性维修需求、优化维修制度的一种系统工程方法,以维修停机损失最小为目标优化系统的维修策略。
产品安全性设计从安全需求转化为对各过程的风险分析、控制,从而实现产品“故障安全”的过程。安全性分析关键技术包括:故障模式、影响与危害性分析FMECA(failure mode effects and criticality analysis)、初步危害分析PHA(preliminary hazard analysis)及事件树分析ETA(event tree analysis)等[4]。
产品的可用性是产品可靠性、可维修性和维修保障体系的综合反映。
4.4 试验验证保障技术
试验验证贯穿于整个产品生命周期,产品开发过程的可靠性与环境试验如图5所示。可靠性与环境试验作为一种保证产品质量和可靠性的重要方式,能够发现产品设计、材料和工艺方面的缺陷,确认是否符合可靠性的定量要求或评估产品的可靠性水平,并为后续可靠性评估提供产品薄弱环节、产品性能变化趋势等信息。
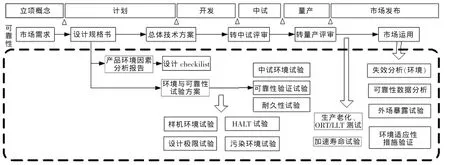
图5 产品开发过程的可靠性与环境试验Fig.5 Reliability and environment test of product development process
5 列车牵引控制技术的发展趋势
目前我国电力牵引控制技术的重点是开发、设计与验证中国标准高速动车组、30吨轴重重载电力机车(5万吨列车)、城际快速动车组与市域列车、现代有轨电车、磁悬浮列车(低速磁浮列车在长沙线投入运行)等。牵引控制关键部件与装置包括大功率功率半导体器件以及新型碳化硅功率器件、高速动车组相关装备、制动能量再生反馈相关装备等。
永磁同步电机以其高效率、高功率密度、强过载能力等优点在轨道交通牵引系统领域受到重视,近期在城市轨道交通车辆上开始进入商业应用阶段,其高性能控制策略主要包括矢量控制和直接转矩控制。
建立在新材料、储能与节能技术、列车网络控制技术等基础上的牵引与电传动技术,以及永磁同步电机和现代电力电子技术、控制理论相结合;现代牵引控制技术还涉及绿色装备制造体系、工业4.0(中国制造2025)与轨道列车制造体系,以及建立在RAMS体系之上的基于物联网的全寿命服务体系,这些新的理念、技术对轨道交通牵引技术的创新而言将是一场革命。
5.1 目前主要的发展趋势
(1)网络化、信息化和智能化。轨道交通机车车辆内的牵引、制动和面向旅客服务的设施增多,列车的编组方式也呈多样化发展,列车通信网络是实现列车实时控制和各类信息传递的唯一装备,其包括重联控制信息、逻辑控制信息、牵引、制动和速度控制信息、状态监视和诊断信息、各动车单元协调统一信息等,以提高系统性能、集成度、可靠性和可维护性以及减轻列车重量。
(2)列车控制系统的平台化与网络化。产品平台的定义首先是根据大量的用户需求和不同的目标市场分析,定义出产品平台的主要功能目标;其次是将主要功能目标分解成主要的支撑实现功能模块。当前国际上各大主要供应商开发的机车/列车控制系统有:西门子公司的SIBAS32、Bombardier公司的MITRAC、ALSTOM公司的AGATE、南车株洲电力机车研究所有限公司的DETECS等,都是建立在计算机网络技术基础之上的牵引控制系统平台。
(3)模块化、标准化与个性化的统一。模块是具有独立功能和一致的连接接口输入输出接口的产品组成部分,是平台化的基础,也是实现牵引控制系统标准化与个性化的基础。基于模块化的平台系统具有可靠性高、开发专业化、市场响应快速、产品成本低与效率高、易于实现系统分级控制和各个层级冗余设计以及体现个性化的优势。
现代列车牵引控制应用系统大多是基于产品平台的二次开发系统,其内容包括系统、硬件和软件的模块化等,系统结构示意见图6。

图6 列车牵引控制系统平台化示意Fig.6 Platform diagram of train traction control system
(4)技术提供与系统解决。现代牵引控制系统,不仅提供大功率电力电子器件,同时还提供完整的牵引控制系统;不仅提供系统装置,更重要的还提供系统的方案架构与完整的技术解决方案;不仅仅是原理的研究与认证,还需要有针对性的系统仿真(物理的、半物理的和全数学的仿真),提供系统性试验与认证测试等保障技术。

图7 基于通信网络的列车计算机牵引控制系统平台结构Fig.7 Platform structure diagram of computer traction control system based on communication network
5.2 牵引控制技术的体系思想发展
基于通信网络的列车计算机牵引控制系统平台结构如图7所示。列车牵引控制技术的思想体系与理念发展经历了如下3个阶段。第1阶段:从电力牵引控制技术出现至列车通信网络技术诞生之前,列车的牵引控制是以牵引装置(调压装置、整流装置、VVVF装置)为核心;第2阶段:从列车通信网络技术诞生,牵引控制的体系结构是以网络为核心,列车上的任何检测控制系统仅仅是列车控制网络上的一个节点而已。这种观念对于其他的控制技术发展也是相通和适用的;第3阶段:目前,由于新的列车通信标准的发布执行,以及产品平台化、统一化与个性化的需求,牵引控制技术向平台化方向发展。通信功能的模块化、通用化以及网络通信协议的可以透明封装成为标志。
[1]冯江华.电力电子技术与铁路机车牵引动力的发展[J].变流技术与电力牵引,2006(2):63-66. Feng Jianghua.Power electronics and the development of traction drive in railway[J].Converter Technology&Electric Traction,2006(2):63-66(in Chinese).
[2]IEC.Electronic railway equipment-Train communication network(TCN)-Part 1:General architecture[S].IEC 61375-1: 2012.
[3]周桂法,邵志和,曾嵘.轨道交通RAMS工作的理解与实施[J].机车电传动,2014(2):1-5. Zhou Guifa,Shao Zhihe,Zeng Rong.Comprehension and implementation of RAMS for rail transit[J].Converter Technology&Electric Traction,2014(2):1-5(in Chinese).
[4]郭其一.可靠性工程与故障诊断技术[M].1版.北京:中国科学出版社,2016.
Current Development and Trend of Rail Transit Vehicle Traction Control
GUO Qiyi1,KANG Jinsong1,FENG Jianghua2,ZHOU Guifa2
(1.Department of Electrical Engineering,Tongji University,Shanghai 201804,China; 2.CRRC Zhuzhou Institute Co.,Ltd.,Zhuzhou 412001,China)
From the emergence of steam locomotive to the current AC drive electric traction,with the development of traction power,rail transit vehicle traction control technology has experienced over two centuries of reform and development,its technical development develops from focusing on traction device,to current high performance control technology that focusing on platform technology,and realizes universalization,standardization and individuation of traction control.This paper conducts relatively complete discussion on the development process,status and tendency.
rail transit;vehicle;traction control;status;tendency

郭其一
10.13234/j.issn.2095-2805.2017.2.040
U 260
A
郭其一(1961-),男,通信作者,博士,教授,博士生导师,研究方向:电气自动化研究以及牵引电气专业的标准建设工作,E-mail:guoqiyi@tongji.edu.cn。
康劲松 (1972-),男,博士,教授,博士生导师,研究方向:电动汽车电驱动系统,E-mail:kjs@tongji.edu.cn。
冯江华(1964-),男,博士,高级工程师(教授级),研究方向:永磁牵引技术的研发工作,E-mail:fengjh@csrzic.com。
周桂法(1964-),男,博士,中国南车首席技术专家,研究方向:载运工具工程、产品开发技术和管理体系,E-mail:zhougf @csrzic.com。
2016-12-01