卒中后上肢康复机器人应用研究进展
2017-03-31李传江
顾 腾,李传江,詹 青
1. 上海师范大学信息与机电工程学院,上海 201418
2. 上海中医药大学附属第七人民医院神经内科,上海 200137
卒中后上肢康复机器人应用研究进展
顾 腾1,李传江1,詹 青2
1. 上海师范大学信息与机电工程学院,上海 201418
2. 上海中医药大学附属第七人民医院神经内科,上海 200137
卒中后运动功能障碍是神经科医师面临的一大难题,其中对卒中患者的上肢进行康复治疗具有重要的临床意义,而上肢康复机器人是解决这一难题的重要手段。本文通过介绍上肢康复机器人的本体结构、基于肌电信号和脑电信号等生物电信号的康复机器人的人机交互技术、康复机器人的位置及接触力控制技术以及上肢康复训练效果的评价方法,探讨上肢康复机器人的发展前景。
卒中;康复;上肢;生物电信号;机器人
To cite: GU T, Ll CJ, ZHAN Q. Advances in application of rehabilitation robots for upper limb dysfunction in patients with stroke. J Neurol and Neurorehabil, 2017, 13(1):44-50.
中国的卒中发病率高于全球平均水平。在卒中幸存者中,70%~80%会伴有不同程度的残疾,尤以偏瘫[1]最为常见。及早对卒中患者的偏瘫部位进行康复训练,显得尤为重要。传统的康复治疗需要患者定期前往医院或者康复中心,在治疗师的指导下进行训练;但由于医疗人员的人力成本较高,并且缺少可以进行康复疗效评价的客观数据,因此难以持续有效地改进患者的康复训练。
随着科学技术的快速发展,国外于20世纪70年代就开始了对肢体康复机器人的研究,机器人辅助康复已成为一个崭新的领域[2]。国内外的科研人员均对机器人应用于上肢康复开展了大量的研究[3]。上肢康复机器人的诞生,将临床康复医学与机器人辅助康复相结合,为上肢康复开辟了新的技术途径,提高了治疗效果,也减轻了临床医护人员的负担和卫生保健成本。面对科学技术的蓬勃发展以及激烈的国际竞争,于1986年开始实施的中国863计划纳入了神经康复机器人技术发展项目,标志着中国康复机器人的研发走上了新的征程。
本文通过介绍上肢康复机器人的本体结构,基于肌电信号和脑电信号等生物电信号的康复机器人的人机交互技术、康复机器人的位置及接触力控制技术以及上肢康复训练效果的评价方法,探讨上肢康复机器人的发展前景。
1 上肢康复机器人的本体结构
在设计上肢康复机器人的机械结构时,需要考虑到设备的安全性、简洁性和易于控制性等性能。设计的合理性对卒中患者的康复训练具有重要意义。目前,上肢康复机器人的结构类型主要包括5种:端点式、桌面式、外骨骼式、绳索式和混合式。
1.1 端点式上肢康复机器人
早期的国外研究主要聚焦于端点式上肢康复设备。端点式结构是指上肢康复设备上的某一点可与患者上肢的某一部位相接触,这种结构设计简单,使用方便。美国麻省理工学院设计的MITMANUS上肢康复训练机器人[4](图1)以及英国Reading大学设计的GENTLE/S上肢康复训练机器人[5]均采用端点式设计结构。
1.2 桌面式上肢康复机器人
桌面式上肢康复机器人的结构简单、体积小巧、便于安放且操作简单而安全,能够进行二维平面的运动,因此患者只需一张桌子就可以进行康复训练。中国科学院设计的Reha-Maus桌面式上肢康复机器人[6]是一款新型的桌面式康复机器人(图2)。季林红等[7]研发的用于平面训练的多阶段康复并联机器人也属于桌面式上肢康复机器人。
1.3 外骨骼式上肢康复机器人
外骨骼式上肢康复机器人是一种可穿戴的康复装置,其机械结构较端点式和桌面式复杂,但是可以达到较高的自由度。瑞士苏黎世大学研发的外骨骼式上肢康复机器人ARMin具有6个自由度[8],华盛顿大学研发的CADEN-7上肢康复机器人具有7个自由度[9](图3),宋俊朋设计的上肢康复机器人也具有7个自由度[10]。
1.4 绳索式上肢康复机器人
绳索式上肢康复机器人采用的是绳索驱动,包括线管钢丝绳和滑轮钢丝绳这2种传动形式,具有平稳可靠、运动灵活的特点,是一种新型的康复装置。早年的绳索牵引基本上被应用于下肢康复[11-13],近些年则被逐渐应用于上肢康复机器人。庄德胜[14]发明了一款绳索驱动的康复装置,具有8个自由度,有着较高的精度。2015年,东南大学也申请了绳索式上肢康复外骨骼机器人的发明专利[15],其机械结构设计见图4。
1.5 混合式上肢康复机器人
混合式上肢康复机器人将上述方法巧妙地结合在一起,具有自由度更多、训练效果更加明显的特点。邵珠峰等[16]发明了一款绳索驱动的外骨骼式上肢康复机器人。北京航空航天大学研发了一款钢丝传动的外骨骼手指康复机器人(图5),该装置体积小、结构简单,可以在桌面上使用[17]。

图1 美国麻省理工学院设计的MlT-MANUS上肢康复训练机器人[4]

图2 中国科学院设计的Reha-Maus桌面式上肢康复机器人[6]

图3 华盛顿大学研发的CADEN-7上肢康复机器人具有7个自由度[9]
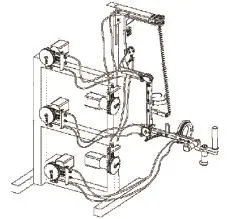
图4 绳索式上肢康复外骨骼机器人[15]
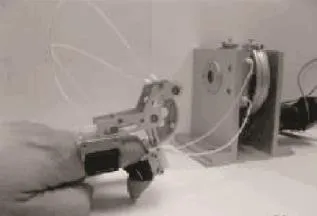
图5 外骨骼手指康复机器人[17]
2 上肢康复机器人的人机交互技术
人机交互技术可以实现人与计算机之间的对话,能够将人体的信息反馈给计算机,从而使患者能够更好地适应康复训练。早期的康复机器人仅执行单一的动作辅助训练,因此患者对其适应性较差。目前,人机交互技术已被应用于康复机器人的研制。
2.1 基于表面肌电信号的人机交互技术
表面肌电信号能够在一定程度上反映神经肌肉的运动信息,从中识别出人的动作模式。Putnam等[18]基于表面肌电信号构建了识别用户手势的计算机控制系统,将该系统应用于上肢康复训练,可以通过健侧带动患侧,对患者进行康复训练。日本佐贺大学基于表面肌电信号,开发了具有3个自由度的前臂和腕部康复机器人[19-20]。Nurhanima等[21]提出了一种基于群智能算法的表面肌电关节力矩估计模型,患者可以根据自身的自然运动强度来控制机器人的运动。
2.2 基于脑电信号的人机交互技术
脑电波是人的大脑在进行思维活动、产生动作意识或是受到外界刺激时大脑神经元的电位变化。利用脑电波的特点,可以预测人的动作意图,将其转换为控制指令,就可以控制外部设备,这种技术被称为脑机接口技术。脑机接口技术已被应用于康复机器人的研发。徐宝国等[22]基于大脑的运动想象能力,研发出一种上肢康复机器人系统,通过让患者观看三维动画中的肢体运动画面,产生运动想象,继而控制机器人进行动作训练。对脑机接口技术的临床应用效果进行长期观察后证实,基于脑机接口技术的康复机器人对神经康复有效。
2.3 基于虚拟现实的人机交互技术
虚拟现实是通过计算机模拟产生一个具有三维空间的虚拟世界,提供给用户视觉、听觉和触觉等的模拟。将虚拟现实技术应用于康复机器人中,可以让患者通过一些小游戏完成简单的动作,如画圆、划十字、做抓取动作等;患者在轻松愉快的康复环境下,其治疗的积极性和主动性均得以提高,取得了良好的治疗效果。上海理工大学利用无线三轴传感器和Unity3D引擎,研发了一种康复训练游戏;让患者穿戴传感器,并且使用减重设备玩康复训练游戏,可以有效地辅助患者进行康复训练[23]。大连海事大学也研发了一套基于虚拟现实技术的上肢康复机器人系统[24]。
3 上肢康复机器人的控制技术
上肢康复训练包括3种训练方式[25-27]:被动运动、主动辅助运动和主动带阻尼运动。在控制上肢康复机器人进行这些运动时,需要考虑到患者的安全性和舒适性,以避免造成二次伤害。目前,常用的上肢康复机器人控制技术包括力控制、位置控制以及力/位置混合控制等。
3.1 力控制策略
力控制技术主要应用于主动辅助运动和主动带阻尼运动。力控制方式最常用的是直接力控制、阻抗控制以及力/位置混合控制等。李庆玲[28]提出阻尼式和弹簧式这2种控制策略,在患者训练时能提供适当的的阻力。王燕妮等[29]提出一种连续渐变的力规划器,用于在训练过程中给患者施加最合适的接触力。
3.2 位置控制策略
位置控制最常用的方法是比例-积分-微分控制,其精度较高,一般用于被动训练模式,因为在这种模式下,患者的主动性一般较差。根据训练要求,规划好康复机器人的运动轨迹,通过位置信息控制机器人的轨迹误差,使运动轨迹的跟踪误差降至最低。康浩博等[30]根据位置测量信息的反馈,设计出一种自适应控制器。
气动肌肉是一种新型的用于位置控制的驱动元件,类似于生物肌肉,其质量轻且具有良好的柔韧性,得到了医疗领域学者的关注。美国亚利桑那大学研制的RUPERT上肢康复机器人[31]就是由人工气动肌肉驱动,具有5个自由度。华中科技大学郭萌等[32]将气动肌肉驱动与眼动跟踪仪相结合,应用模糊控制技术,研发出一套可穿戴式上肢康复装置,该装置响应速度快、跟踪误差小,具有良好的实用性。
3.3 力/位置混合控制策略
力控制和位置控制相结合的康复机器人将位置传感器与扭矩传感器相结合,实时跟踪机械臂的轨迹误差以及与患者之间的相互作用力,具有很好的鲁棒性,其平稳性和安全性也较高。东南大学马妍等[33]应用力/位置混合控制,研发出一个基于STM32微控制器的上肢康复机器人控制系统,实现了对康复机器人控制的安全性和平稳性。力/位置混合控制技术在上肢康复机器人中的应用日益广泛。
4 上肢康复机器人训练效果的评价方法
与传统的治疗师辅助训练相比,康复机器人辅助训练具备一个客观的评价机制,能够客观地反映训练效果,有助于调整训练,效果也更明显。目前,临床上常用的定量评价方法包括Brunnstrom运动功能恢复6级分期评定表、简易上肢功能评价表、简明Fugl-Meyer上肢运动功能评分法、改良Barthel指数量表和改良Ashworth痉挛评定量表等。Hennes等[34]通过比较每一位患者在学习和运动阶段的数据,采用模糊逻辑进行评估。
东北大学张维秋设计了一个上肢康复评价子系统[35],将模糊集合论、模糊综合评价法与层次分析法进行有效结合,基于模糊层次综合评价方法,构建了一个康复评价模型,并采用表面肌电信号对模型进行验证。
当今的康复机器人系统正朝着训练与评价并举的方向发展。相较于传统的评价方法,训练与评价相结合的方法可以完整地记录训练过程中的各种数据,其客观性更强,评价指标多样,训练效果好,为治疗师提供了许多便利。
5 展 望
随着社会老龄化和卒中年轻化的发展,对卒中患者上肢康复机器人的需求日益增长。目前,适合于家庭使用的是结构简单、稳定可靠、成本较低的桌面型康复机器人。通过结合先进的肌电和虚拟人机交互技术以及远程监控系统,可以在家中愉快地完成康复训练;同时,治疗师可以通过远程实时监控对训练情况进行指导,提高训练的效率。从技术发展方向来看,外骨骼式康复机器人是重要的发展方向,其自由度高,患者对其适应性也较强;但需要解决的是成本、可靠性以及便携性等问题。随着科学技术的进步,外骨骼式康复机器人也将逐渐走入家庭。
人工智能时代的到来,机器人成为中国软实力的重要体现。目前,国内康复机器人的整体框架已经形成,已研发了可供使用的康复机器人。在研发康复机器人的过程中,需要生物医学、计算机科学和机械学等多学科的参与。相信在人工智能的大时代里,用于卒中患者康复训练的上肢康复机器人的发展一定会取得更大的突破,为人类健康造福。
[1] 陈景藻. 康复医学[M]. 北京: 高等教育出版社, 2001:26.
[2] Winklevoss HE. lnflation based variable life insurance models[J]. J Risk lnsur, 1974, 41(4):601-619.
[3] Hawing WS. A review of design issues in rehabilitation robotics with reference to North American Research[J]. lEEE Trans Rehabil Eng, 1995, 3(1):3-13.
[4] Krebs Hl, Hogan N, Aisen ML, et al. Robotaided neurorehabilitation[J]. lEEE Trans Rehabil Eng, 1998, 6(1):75-87.
[5] Loureiro R, Amirabdollahian F, Topping M, et al. Upper limb robot mediated stroke therapy—GENTLE/s approach[J]. Auton Robot, 2003, 15(1):35-51.
[6] 罗东峰. 桌面式上肢康复机器人控制研究[D]. 北京:中国科学院研究生院, 2012.
[7] 季林红, 刘恩辰, 潘 杰. 一种平面训练上肢偏瘫多阶段康复并联机器人:CN102715999A[P]. 2012-10-10.
[8] Maciejasz P, Eschweiler J, Gerlach-Hahn K, et al. A survey on robotic devices for upper limb rehabilitation[J]. J Neuroeng Rehabil, 2014, 11:3.
[9] Perry JC, Rosen J, Burns S. Upper-limb powered exoskeleton design[J]. lEEE/ASME Trans Mechatronics, 2007, 12(4):408-417.
[10] 宋俊朋. 7-DOF外骨骼串联式上肢康复机器人的结构设计与研究[D]. 镇江:江苏大学, 2015.
[11] Yamamoto M, Yanai N, Mohri A. Trajectory control of incompletely restrained parallelwire-suspended mechanism based on inverse dynamics[J]. lEEE Trans Robot, 2004, 20(5):840-850.
[12] Kamishima H, Arai T, Yuasa K, et al. Hybrid drive parallel arm and its motion control[C]// Proceedings. 2000 lEEE/RSJ lnternational Conference on lntelligent Robots and Systems (lROS 2000). New York: lEEE, 2000:516-521.
[13] Verhoeven R. Analysis of the Workspace of Tendon-based Stewart Platforms[EB/ OL]. (2014-06-29) [2016-09-01]. http:// duepublico.uni-duisburg-essen.de/ servlets/DerivateServlet/Derivate-5601/ verhoevendiss.pdf.
[14] 庄德胜. 一种绳驱动多关节机器人:CN102941573A[P]. 2013-02-27.
[15] 王兴松, 吴青聪. 一种基于套索驱动的上肢康复外骨骼机器人:CN104873360A[P]. 2015-09-02.
[16] 邵珠峰, 唐晓强, 王立平, 等. 一种绳索驱动的外骨骼式上肢康复机器人系统:CN103845184A[P]. 2014-06-11.
[17] Wang S, Li J, Zhang Y, et al. Active and passive control of an exoskeleton with cable transmission for hand rehabilitation[C]//2009 2nd lnternational Conference on Biomedical Engineering and lnformatics. New York: lEEE, 2009:1-5.
[18] Putnam W, Knapp RB. Real-time computer control using pattern recognition of the electromyogram[C]//Proceedings of the 15th Annual lnternational Conference of the lEEE Engineering in Medicine and Biology Societ. New York: lEEE, 1993:1236-1237.
[19] Kiguchi K, Fukuda T. A 3DOF exoskeleton for upper-limb motionassist-consideration of the effect of bi-articular muscles[C]//Proceeding of the 2004 lEEE lnternational Conference on Robotics and Automation. New York: lEEE, 2004:2424-2429.
[20] Kiguchi K, Rahman MH, Yamaguchi T. Adaptation strategy for the 3DOF exoskeleton for upper-limb motion assist[C]//Proceedings of the 2005 lEEE lnternational Conference on Robotics and Automation. New York: lEEE, 2005:2296-2301.
[21] Nurhanima K, Elamvazuthia l, Vasant P, et al. Joint torque estimation model of surface electromyography(sEMG) based on swarm intelligence algorithm for robotic assistive device[J]. Proc Comp Sci, 2014, 42:175-182.
[22] 徐宝国, 彭 思, 宋爱国, 等. 基于运动想象脑电的上肢康复机器人[J]. 机器人, 2011, 33(3):307-313.
[23] 雷 毅, 喻洪流, 王露露, 等. 基于虚拟现实的交互式上肢康复训练系统研究[J]. 生物医学工程学进展, 2015, 36(1)21-24.
[24] 秦江伟, 贾晋杰, 李成求, 等. 基于虚拟现实技术的三自由度上肢康复机器人系统[J].机电产品开发与创新, 2013, 26(6):17-19.
[25] Zhang JF, Dong YM, Yang CJ, et al. 5-Link model based gait trajectory adaption control strategies of the gait rehabilitation exoskeleton for post-stroke patients[J]. Mechatronics, 2010, 20(3):368-376.
[26] Anam K, Al-Jumaily AA. Active exoskeleton control systems: state of the art[J]. Proc Eng, 2012, 41:988-994.
[27] 吴 军. 上肢康复机器人及相关控制问题研究[D]. 武汉:华中科技大学, 2012.
[28] 李庆玲. 基于sEMG信号的外骨骼式机器人上肢康复系统研究[D]. 哈尔滨:哈尔滨工业大学, 2009.
[29] 王燕妮, 朱宝彤, 戴亚平. 基于模糊阻抗控制的上肢康复机器人中接触力规划器的设计[J]. 北京理工大学学报, 2015, 35(8):805-809.
[30] 康浩博, 王建辉. 基于安全性考虑的五自由度外骨骼式上肢康复机器人自适应控制[J].中国科技论文, 2014, 9(7):844-851.
[31] Zhang H, Austin H, Buchanan S, et al. Feasibility studies of robot-assisted stroke rehabilitation at clinic and home settings using RUPERT[C]//2011 lEEE lnternational Conference on Rehabilitation Robotics. New York: lEEE, 2011:1-6.
[32] 郭 萌, 涂细凯, 何际平, 等. 基于模糊Pl控制的穿戴式上肢康复机器人[J]. 华中科技大学学报(自然科学版), 2015, 43(s1):355-358.
[33] 马 妍, 宋爱国. 基于STM32的力反馈型康复机器人控制系统设计[J]. 测控技术, 2014, 33(1):74-78.
[34] Hennes M, Bollue K, Arenbeck H, et al. A proposal for patient-tailored supervision of movement performance during end-effectorbased robot-assisted rehabilitation of the upper extremities[J]. Biomed Tech (Berl), 2015, 60(3):193-197.
[35] 张维秋. 五自由度上肢康复机器人康复评价系统的研究与实现[D]. 沈阳:东北大学, 2012.
Advances in application of rehabilitation robots for upper limb dysfunction in patients with stroke
GU Teng1, LI Chuanjiang1, ZHAN Qing2
1. The College of lnformation, Mechanical and Electrical Engineering, Shanghai Normal University, Shanghai 201418, China
2. Department of Neurology, Seventh People’s Hospital Affiliated to Shanghai University of Traditional Chinese Medicine, Shanghai 200137, China
Motor dysfunction after stroke is a major problem for neurologists, and it is of important clinical significance that the stroke patients with upper limb dysfunction should need rehabilitation treatment, while the upper limb rehabilitation robots are important tools to solve this problem. This paper introduces the structures of ontology of upper limb rehabilitation robots, human-computer interaction technology of rehabilitation robots based on biological signals including myoelectric signal and electroencephalogram, the control system of rehabilitation robot technology based on the position and force, and the evaluation methods for the efficacy of upper limb rehabilitation training, in order to explore the developing prospects of upper limb rehabilitation robots.
Stroke; Rehabilitation; Upper extremity; Bioelectric signal; Robotics
1. Ll Chuanjiang 2. ZHAN Qing
10.12022/jnnr.2016-0060
1. 李传江2. 詹 青
E-MAIL 1. licj@shnu.edu.cn 2. zhanqing@tongji.edu.cn
E-MAIL ADDRESS 1. licj@shnu.edu.cn 2. zhanqing@tongji.edu.cn
上海市科委青年基金项目(编号:20164Y0073);上海市部分地方高校能力建设项目(编号:16070502900);上海师范大学康复机器人与智能信息处理技术校级创新团队建设项目(编号:A-7001-15-001005);上海中医药大学附属第七人民医院“七院新星”项目(编号:XX2016-03、XX2016-09)
FUNDlNG/SUPPORT: Youth Fund Project of Science and Technology Commission of Shanghai Municipality (No. 20164Y0073); Shanghai Local Colleges and Universities Capacity Building Project (No. 16070502900); University lnnovation Team Building Project of Rehabilitation Robot and lntelligent lnformation Processing Technology of Shanghai Normal University (No. A-7001-15-001005); The New Star Project of Seventh People’s Hospital Affiliated to Shanghai University of Traditional Chinese Medicine (No. XX2016-03, XX2016-09)
CONFLlCT OF lNTEREST: The authors have no conflicts of interest to disclose. Received Sept. 30, 2016; accepted for publication Dec. 12, 2016 Copyright © 2017 by Journal of Neurology and Neurorehabilitation
.
顾 腾,李传江,詹 青. 卒中后上肢康复机器人应用研究进展[J]. 神经病学与神经康复学杂志, 2017, 13(1):44-50.
