交流异步电动机软起动装置控制电路设计
2017-03-31郎福成王琪
郎福成,王琪
(1.国网辽宁省电力有限公司电力科学研究院,辽宁 沈阳 110006;2.国家电网公司高电压强电流实验室,辽宁 沈阳110006;3.煤科集团沈阳研究院有限公司,辽宁 抚顺 113122)
0 引言
电动机作为工业生产和人民生活中主要的电能转换为机械能的载体,电动机电能消耗占我国电力消耗的重要比例,据设备工程监理国际合作论坛数据显示:电动机消耗了中国工业行业当中60%的电能。电动机具有体积小、效率高、价格低廉、控制过程方便、输出力矩大等优点,已经广泛应用到钢铁、冶金、军事、航空航天和医疗卫生等关系到工业发展和人民生活的各个领域[1-2]。在电动机起动过程中,如果不施加任何措施在电动机定子绕组两端直接施加额定电压起动,起动瞬间产生较大的冲击电流,一般能够达到额定工作电流的4-7倍,并且转速从零迅速上升到额定转速,瞬时输出转矩、电流对电动机和负载都将造成较大损耗,同时也将严重污染电网质量,影响其他用电设备的安全。
1 电动机数学模型
交流异步电动机利用定子与转子之间的电磁耦合实现电能与机械能之间的转换,为了对电动机的能量转化过程进行定量分析,需要对电动机进行理想化假设:转子结构完全对称(磁路在空间上完全对称)、铁芯导磁系数为常数(不考虑磁饱和、磁滞、涡流和肌肤效应对导磁系数的影响)、三相绕组完全对称(三个绕组空间分布电角度为互差120°)、定子与转子表面光滑且产生的磁动势为正弦分布,得到电压方程、电磁转矩方程和运动方程,如下所示:
交流异步三相定子电压方程表示为:
(1)式中,uA、uB、uC为电动机A、B、C三相定子电压,iA、iB、iC为电动机A、B、C三相电流,ΨA、ΨB、ΨC为电动机A、B、C三相绕组磁链,RS为定子各相绕组的电阻。
交流异步三相转子绕组折算到定子侧后的电压方程为:

交流异步电磁转矩方程表示为:

(3)式中,np为电动机的极对数,θ为角位移。
交流异步电动机运动方程式:

(4)式中,TL为负载阻转矩;J为机组的转动惯量;为电动机转子的电角速度。
2 晶闸管调压原理
交流异步电动机晶闸管调压技术是将晶闸管接入交流电源与负载之间,通过改变负载的端电压实现电压调节。晶闸管调压主电路图如图1所示。斩波调压和相位调压是两种常用的交流异步电动机调压技术。斩波调压通过改变功率器件控制信号的占空比来改变电动机绕组端电压的有效值,斩波调压过程功率器件的通断频率不能太低,否则将产生较大的转矩波动,每一次通电相当于电动机重新启起动过程。在电源切断时,电动机气隙磁场通过转子的瞬态电流来维持,随着转子旋转而旋转,气隙磁场在定子绕组中感应的电动势频率将有所变化,当断流时间间隔较长时,这个旋转磁场在定子中感应的电动势和重新接通时的电源电压在相位上可能会有很大的差别,这样就会出现较大的电流冲击,可能危及晶闸管的安全。一般晶闸管的工作频率不高,不能短时间内重复动作,并且晶闸管不能自关断,若采用斩波技术则还需要附加斩波电路,这样就带来装置复杂和价格上升的问题。

图1 晶闸管调压主电路图
相位调压利用三对反并联晶闸管组成三相三线交流调压电路(如图1所示)进行调压,电动机的负载可以采用星型或角型的连接方式。控制门极脉冲信号的相位变化来控制端电压的幅值,晶闸管的导通角度直接决定输出电压的幅值。晶闸管的导通角度与控制角反比变化,控制角度越小,输出电压越大。只需在电动机起动过程中通过控制晶闸管控制角的大小,就可使电动机的端电压和起动电流根据工作要求设定的规律进行变化。这样,电动机的起动方式和起动电流均可任意调整和设置,从而电动机可以获得优良的起动过程[3]。因此,其实质是降压起动,与传统降压起动不同之处是无机械触点,起动电压和起动电流任意可调,可避免直接起动时强烈的起动电流冲击。
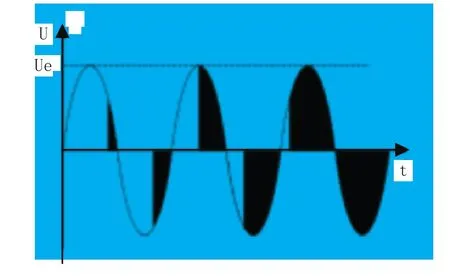
图2 晶闸管移相控制电压波形
3 控制电路设计
在交流异步电动机软起动装置控制电路设计过程中,首先要考虑的是控制效果和安全性能,同时也要考虑装置的成本、器件散热、安装和后续维修方便性,尽最大可能实现性价比的最大化[4-6]。交流异步电动机起动性能主要的衡量指标是起动电流倍数和起动转矩倍数,起动转矩与定子端电压的平方成正比,启动电流与定子端电压成正比,所以通过控制电动机定子端电压就可以实现对起动特性的调节。在交流异步电动机软起动装置控制电路包括主电路、采集单元和控制单元三部分,电路结构框图如图3所示。主电路为电动机绕组供电线路,分为晶闸管组合旁路接触器两个回路(阻容吸收用于滤除电网中的杂质),在启动的过程中电流经过晶闸管组回路,正常工作过程中电流经过旁路接触器回路,控制单元发送指令通过转换模块实现两个回路之间的切换。采集单元用于采集晶闸管组的温度信号、电动机的转速信号、主电路的电压和电流信号,并经过信号滤波和放大后发送给控制单元,同时采集单元的驱动模块实现的信号放大和隔离作用,接收控制单元单的动作信号并进行信号转换,为晶闸管组的通断状态提供动作信号。控制单元中的单片机用于接收采集单元的信号,并进行运算和处理,得到晶闸管组温度、电动机转速、主电路电压和电流值,在显示模块、存储模块上实现数据显示和存储,在设备故障情况下通过报警模块进行报警,利用通讯模块与上位机之间实现数据、动作指令的通讯。

图3 交流异步电动机软起动装置控制电路框图
随着电力电子技术的发展,电网中的谐波问题日益严重,许多低功率因数的电力电子装置给电网带来额外负担并影响供电质量,因此,电力电子装置的谐波污染已成为阻碍电力电子技术发展的重大障碍,谐波治理问题已经迫在眉睫。关于谐波污染的治理需要从法制和技术两方面着手,从法制角度进行限制,谐波在允许范围内方可入网,未达标的必须采取治理措施,以防谐波扩散。从技术角度对谐波治理一方面对产生谐波装置本身进行改进,使其不产生谐波,另一方面在电力系统或谐波负载的交流侧加装滤波装置,通过外加设备对电网实施谐波补偿。晶闸管在移相调压过程中输出电压波形已经不是正弦波(不含有偶次谐波,奇次谐波主要以三次谐波为主),在电动机起动过程中容易附加损耗,也会产生转矩脉动、发热严重等其他问题,同时也将影响其他用电设备正常工作和对整个电网的质量造成严重污染[9]。根据交流异步电动机软起动装置控制电路工作原理、谐波特点和预算成本角度综合考虑,选用无源滤波技术进行谐波治理。无源滤波技术采用电力电容器、电抗器和电阻器按功能要求适当组合,在系统中为谐波提供并联低阻通路,起到滤波作用。谐波的综合治理工作势在必行[10]。消除电力电子装置谐波污染的工作,可称之为电力电子技术应用的“绿色工程”。
4 结论
在电动机起动控制技术领域,软启动技术以其价格低廉和性能优越的优势一直都是该领域的一个研究热点。利用单片机控制技术实现对交流异步电动机起动过程有效控制,具有平稳起动、冲击电流小、节能环保等有点,在交流异步电动机起动技术中获得广泛应用。
[1]李科,基于阈值回归模型的中国电力消费与经济增长的关系 [J].系统工程理论与实践.2012.8:1704-1711.
[2]李让. 基于 DSP 控制变压器运行参数监测系统设计[J]. 新型工业化,2017,7(1):83-86.
[3]胡文平,尹项根,张哲.电气设备在线监测技术的研究与发展[J].华北电力技术,2003,2:23-26
[4]李春艳,陈敬轩.CAN 通讯中的一种动态自同步方法设计[J].新型工业化,2015,5(4):55-60.
[5]Yang F, Ma R G, Wu Y,et a1. Numerical study on arc plasma behavior during arc commutation process in direct current circuit breaker[J].Plasma Science and Technology, 2012, 14(2):167-171.
[6]陶骏,刘正之,许家治.基于电流调制的高功率动态静止无功补偿装置[J].电力系统自动化,2006(10):16-20.
[7]杨前明,崔克克,邵长新,等.棉桶搬运复合机器人作业特征分析及其动力电源设计[J].新型工业化,2017,7(2):19-25.
[8]路军,程乐峰,余涛.农村配电网低压智能开关节能型控制调压器研究[J]. 新型工业化,2016,6(10):29-37,51.
[9]李丹. 一种阵列电阻传感器的电阻检测电路设计[J]. 软件,2017,38(01):120-122.
[10]吕梅,赵元鹏. CIM模型下序网电路及其数据接口开发[J]. 软件,2015,36(08):137-143.
