永磁同步电机矢量控制系统仿真研究*
2017-03-31郎宝华孙鲁艳
郎宝华 康 标 孙鲁艳
(1.西安工业大学电子信息工程学院 西安 710021)(2.西北工业集团有限公司 西安 710043)
永磁同步电机矢量控制系统仿真研究*
郎宝华1康 标1孙鲁艳2
(1.西安工业大学电子信息工程学院 西安 710021)(2.西北工业集团有限公司 西安 710043)
矢量控制是永磁同步电机控制系统中非常重要的一种控制方式,通过分析永磁同步电机数学模型和矢量控制原理的基础上,采用Matlab/Simulink搭建永磁同步电机矢量控制系统的仿真模型,对PMSM矢量控制系统进行仿真和实验分析,经过比较仿真结果和实验结果证明该仿真模型的有效性以及控制算法的正确性,为永磁同步电机控制系统设计和调试提供了理论基础。
永磁同步电机; 矢量控制; Matlab/Simulink仿真
Class Number TP273
1 引言
近些年来,随着电力电子技术及微电子技术的快速发展,新型电机控制理论的不断涌现,稀土永磁材料性能的大幅度提高和价格的降低,各种交流永磁同步电动机伺服系统成为交流伺服系统的主流。永磁同步电动机以其具有高转矩惯量比、高功率密度、高效率等优点已得到广泛应用,特别在数控机床、工业机器人等对精度和响应特性要求较高的场合,永磁同步电动机伺服系统的优势特别明显。本文对基于定向磁场矢量控制的永磁同步电动机进行了理论研究与分析,运用Matlab/Simulink对其调速运行进行了建模与仿真,并对仿真结果进行了实验验证。
2 永磁同步电机的数学模型
永磁同步电机具有结构简单、控制方便、运行可靠、功率因数高等特点,采用三相交流供电,是一个多变量、非线性、强耦合的控制对象。
通常在永磁同步电机的数学建模中,常用的三角坐标系是:ABC三相静止坐标系、α-β两相静止坐标系和d-q两相旋转坐标系。通过坐标旋转变换,使电机的数学模型实现解耦,然后进行分析和控制。永磁同步电机在不同的坐标系之间相互转换的理论依据是:在不同的坐标系下,电机定子绕组产生的磁动势要相同。
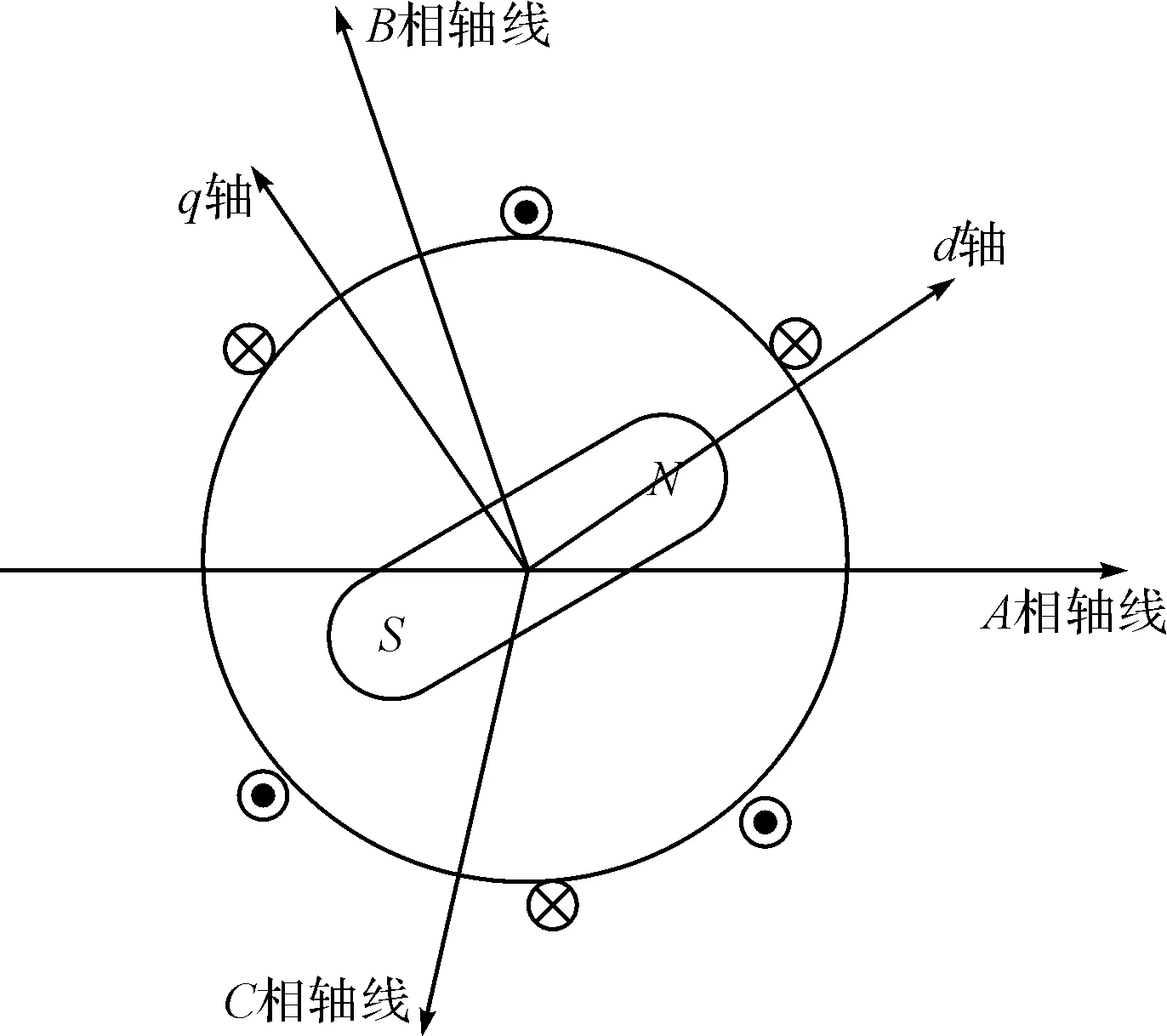
图1 PMSM的物理模型
从ABC三相静止坐标系到α-β两相静止坐标系的坐标变换矩阵,称之为Clarke变换矩阵:
从α-β两相静止坐标系到ABC三相静止坐标系的坐标变换称为Clarke逆变换。Clarke逆变换的矩阵为:
从α-β两相静止坐标系到d-q两相旋转坐标系的坐标变换称为Park坐标变换,Park坐标变换矩阵为
从d-q两相旋转坐标系到α-β两相静止坐标系的坐标变换称为Park逆变换,Park逆变换矩阵为
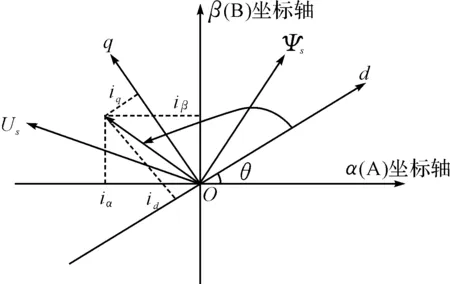
图2 PMSM的空间矢量图
为建立正弦波永磁同步电机的dq系数学模型,假设:
1) 忽略电机铁心饱和。
2) 忽略电机绕组漏感。
3) 转子上没有阻尼绕组。
4) 永磁材料的电导率为零。
5) 不计涡流和磁滞损耗,认为磁路是线性的。
6) 定子相绕组的感应电动势波为正弦型的,定子绕组的电流在气隙中只产生正弦分布的磁势,忽略磁场的高次谐波。
在理想假设条件下得到PMSM的电压、磁链转矩和机械运动方程。
永磁同步电机在dq轴转子坐标系上的定子电压方程为
式中:ud、uq是dq坐标系下的定子电压分量;id、iq是dq坐标系下的定子电流分量;ψd、ψq是dq坐标系下的定子磁链分量;Rs是定子电阻。
定子磁链方程
ψd=Ldid+ψf
ψq=Lqiq
式中:Ld、Lq是dq坐标系下的定子绕组电感分量;ψf是转子永磁磁链。
定子电流为
id=iscosβ
iq=issinβ
式中:β为is与d轴之间的夹角。
电磁转矩方程为
式中:Te是电机的电磁转矩;p是电机极对数。
对于表贴式永磁同步电机,直轴电感与交轴电感相等,即Ld=Lq,电磁转矩方程改写为
3 矢量控制原理
矢量控制算法建立在永磁同步电机的数学模型上,矢量控制理论的基本思路是:通过坐标变换把复杂的交流电机的数学模型等效成直流电机模型,对交流电机耦合的模型系统解耦,然后通过直流电机的控制策略进行控制,最后再次经过坐标反变换又重新回到交流电机模型本身。由永磁同步电机在d-q两相旋转坐标系下的数学模型可知,对永磁同步电机的控制就是对id、iq电流分量分别进行控制。因为永磁体的磁通保持不变,所以采用id*=0的控制策略可以使得控制变得非常简单。由电磁转矩的公式可以看出,永磁同步电机的电磁转矩Te只和电流分量iq有关,所以通过控制iq就可以控制转矩Te。
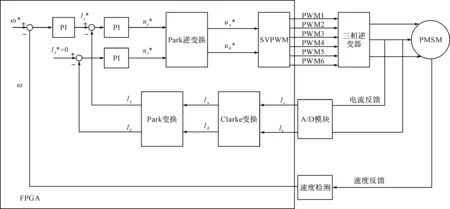
图3 永磁同步电机矢量控制原理框图
永磁同步电机矢量控制系统主要包括:电流检测模块、速度检测模块、坐标变换、电流PI调节模块、速度PI调节模块和SVPWM模块。永磁同步电机模块可以直接选用Matlab自带电机库中的PMSM,通过对PMSM的电机参数进行正确设置就可以实现功能,其他模块也可以通过Matlab/Simulink库文件进行查找,并且通过修改相关参数进行整个系统模型的完整搭建。
本文采用的是电流、速度双闭环的控制方式,永磁同步电机矢量控制系统的内环为电流环,外环为速度环,这样可以提高控制精度,减小误差干扰。电流环作为永磁同步电机矢量控制系统的内环,具有抑制启、制动电流,加速电流的相应过程的作用,同时电流闭环还能改造电机对象的模型,实现励磁分量和转矩分量解耦,得到等效的直流电机模型。转速环作为双闭环控制系统的外环,将检测到的电机实际速度ω和给定的指令ω*相比较,得出两者的误差,然后经过速度PI控制器进行调节,输出结果作为q轴的电流指令信号iq*,d轴的指令信号为id*=0。
4 SVPWM原理
本文的矢量控制系统中的逆变器的控制方式采用的是电压空间矢量脉宽调制(SVPWM)技术。SVPWM技术主要是从电机的角度出发,它着眼于如何使电机获得幅值恒定的圆形旋转磁场,即正弦磁通。SVPWM主要是使电机获得幅值恒定的圆形磁场,当电机通以三相对称的正弦电压时,交流电机内产生圆形磁链并以此磁链为基准,通过逆变器功率器件的不同开关模式产生有效矢量来逼近基准圆,并产生三相互差120°电角度的接近正弦波的电流来驱动电机。
SVPWM是确定三相逆变电源电力电子器件开断时刻的一种方式。三相桥式逆变电路每个桥臂有两个开关管,其开关信号互补。三相桥式逆变电路各桥臂通断状态的组合为6个有效的空间矢量V1(001)、V2(010)、V3(011)、V4(100)、V5(101)、V6(110)和2个零矢量V0(000)、V7(111),向量分布图如图4所示。
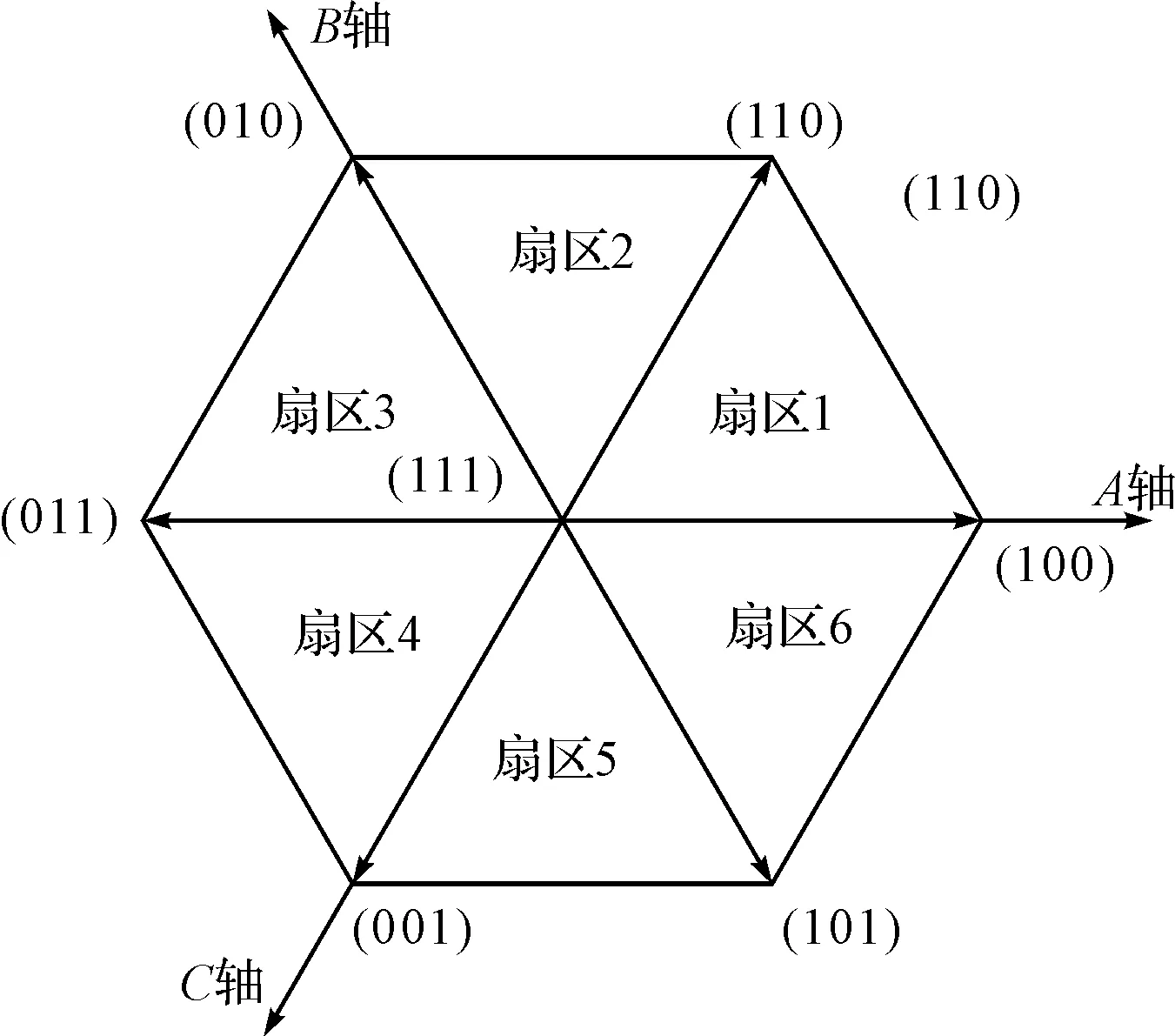
图4 SVPWM向量扇区分布图
SVPWM是一种优化的PWM方法,它通过功率开关器件不同的开关模式产生的空间矢量跟踪基准矢量圆来获得理想圆矢量。由于SVPWM数字化程度比较高,而且易于控制,具有直流电压利用率高、转矩脉动小等优点。SVPWM调制的实现步骤为: 1) 计算电压空间矢量V*所在扇区; 2) 判断V*所在扇区; 3) 根据扇区分配矢量,计算每个扇区的作用时间; 4) 生成三相PWM控制信号。
5 PMSM矢量控制系统模型搭建与仿真结果
根据矢量控制原理和SVPWM调制技术,在Matlab/Simulink中搭建了采用PI控制的永磁同步电机交流调速系统的仿真模型,进行仿真实验研究,电流环和速度环都是采用PI控制器,PI控制器的参数整定对于整个系统的性能具有很大影响,所以通过不断调试,最终达到稳定运行,从而验证系统采用PI控制的效果。永磁同步电机仿真模型由永磁同步电机本体模块、速度控制模块、矢量控制模块、电压坐标转换模块等组成,整个系统仿真模型如图5所示。
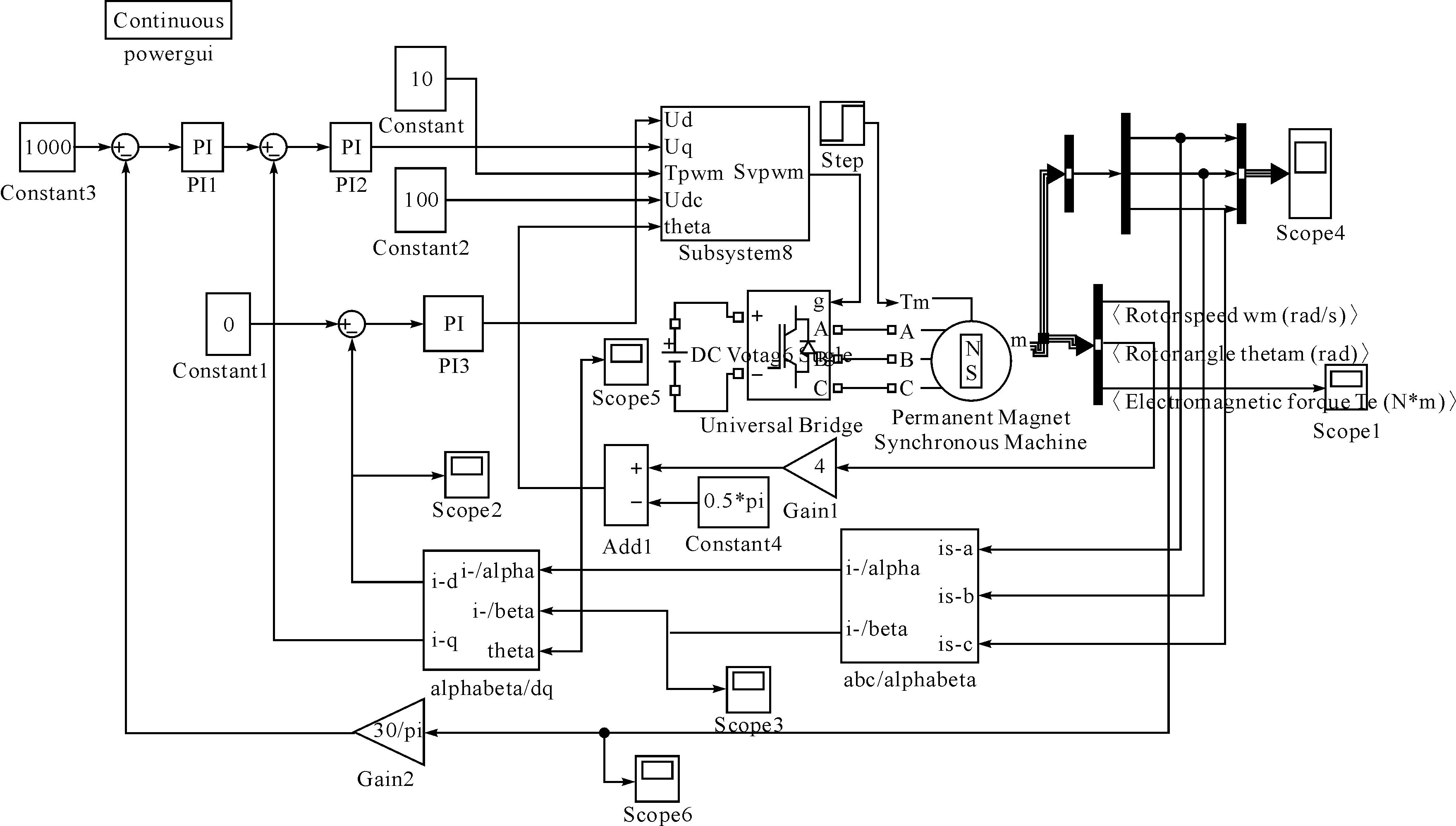
图5 PMSM矢量控制仿真模型
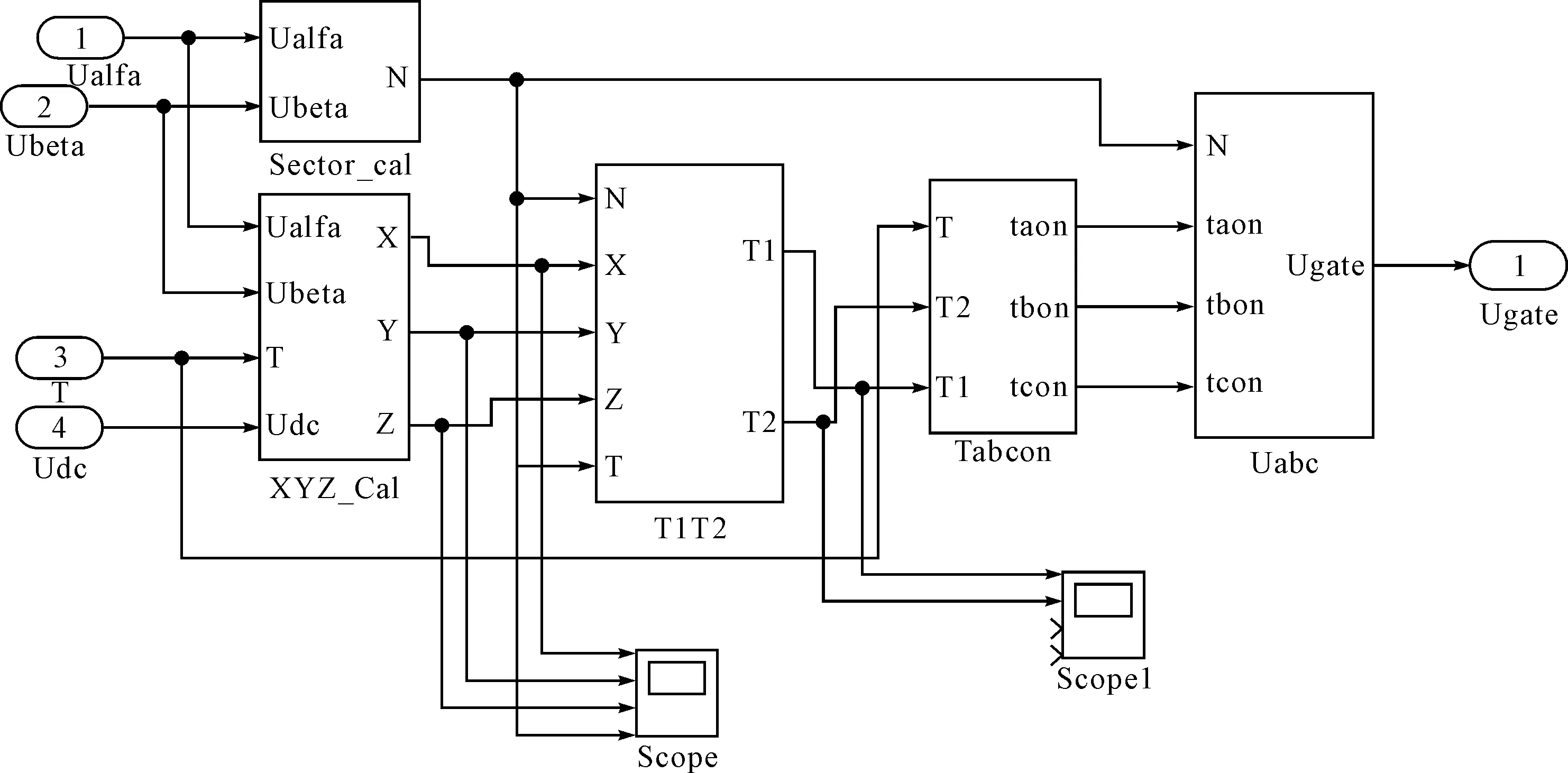
图6 Matlab/Simulink系统中SVPWM模型
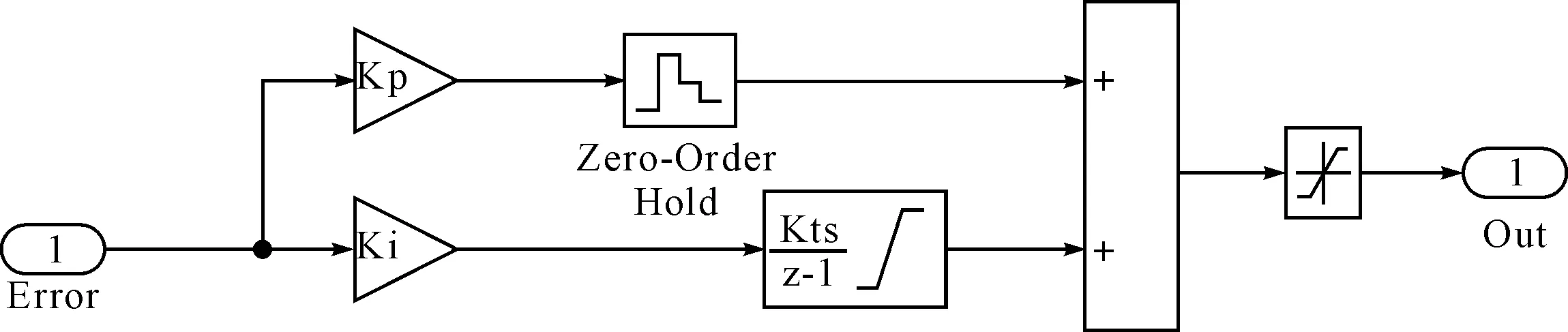
图7 PI控制器
仿真模型中永磁同步电机参数设置如下:Rs=2.75Ω,Ld=Lq=0.008H,转子永磁磁链ψf=0.273Wb,转动惯量J=8.15×10-4kg·m2,额定转速为1000rad/min,额定转矩为4N·m,额定电流为3.3A,极对数p=4。
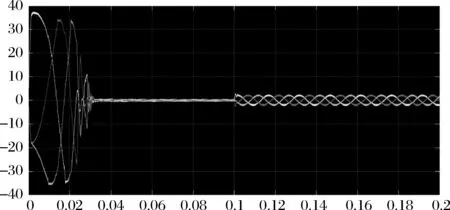
图8 三相定子电流波形
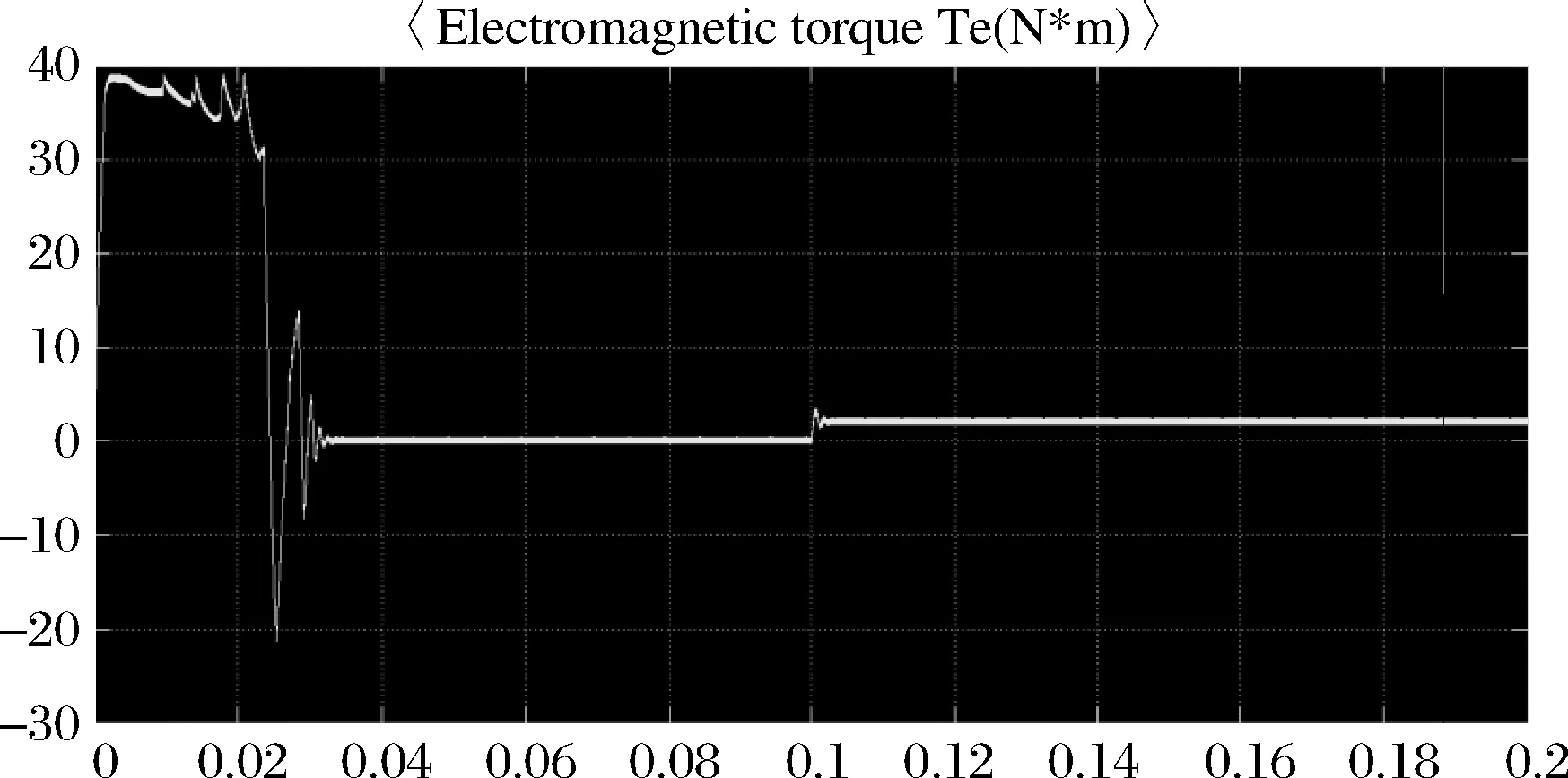
图9 转矩曲线
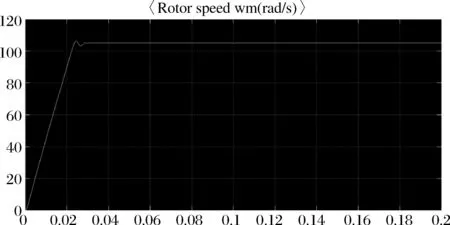
图10 给定转速为1000rad/min转速曲线
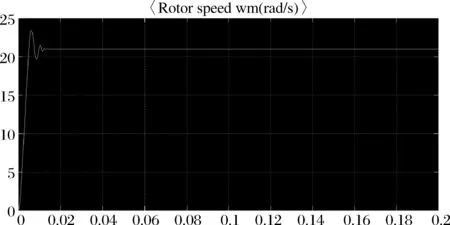
图11 给定转速为200rad/min转速曲线
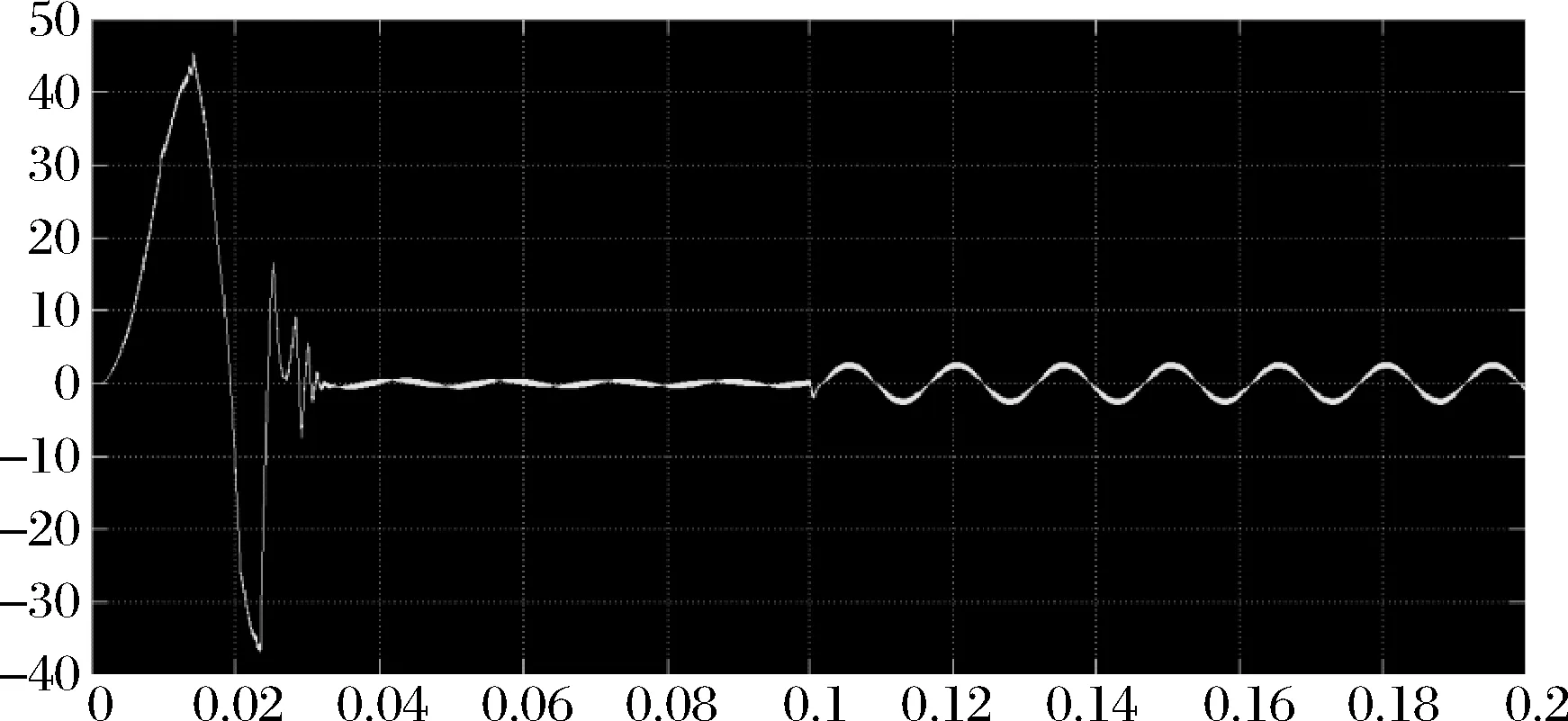
图12 单相定子电流波形
本实验的目的是观察电机各输出量随转矩指令值变化的动、静态响应。从仿真结果图9可以看出,在电机通电以后,转矩迅速达到最大转矩,然后在很短的时间内恢复到稳定值并且保持恒定。从仿真结果图10和图11可以看出,在给定1000rad/min的参考转速下,系统响应很快,并且能够迅速达到稳定状态,通过对比给定1000rad/min和200rad/min的仿真结果发现给定转速200rad/min达到稳定运行状态的响应时间更短。
通过仿真结果的曲线图来看,PMSM矢量控制系统的响应快速且平稳,电机转速和转矩超调量比较小,相电流较为理想,系统启动后保持转矩恒定。Simulink的响应曲线在达到稳定时与实际计算结果也比较符合,从而得到本次实验结论:永磁同步电机矢量控制系统具有较好的动态响应特性和速度控制特性,具有良好的控制效果。
6 结语
通过对永磁同步电机数学模型理论分析的基础上,利用矢量控制思想和SVPWM技术,在MATLAB/SIMULINK环境下建立了PMSM矢量控制系统的仿真模型。经过观察和比较仿真结果可以看出系统能够平稳运行,并且具有良好的静、动态特性,符合实际的永磁同步电机的运行特性,建立的PMSM矢量控制仿真模型也为实际伺服系统的设计和调试提供了理论基础和指导思路。
[1] 陈伯时,陈敏逊.交流调速系统[M].北京:机械工业出版社,1998:73-87. CHEN Boshi, Chen Mingxun. AC speed control system[M]. Beijing: Machinery Industry Press,1998:73-87.
[2] 洪熙闻,王钦若.永磁同步电机电压空间矢量控制仿真研究[J].上海大中型电机,2010(4):43-47. HONG Xiwen, WANG Qinruo. Simulation Study PMSM voltage space vector control[J]. Shanghai medium-sized motor,2010(4):43-47.
[3] 崔茂振,张昌凡,朱剑.永磁同步电机滑模调速控制及其实现[J].电子测量与仪器学报,2012,26(6):84-91. CUI Maozhen, ZHANG Changfan, ZHU Jian. Sliding speed control PMSM and its implementation[J]. Electronic Measurement and Instrument,2012,26(6):84-91.
[4] 何杰,王家军.基于SVPWM的永磁同步电动机系统建模与仿真[J].机电工程,2009,26(7):77-82. HE Jie, WANG Jiajun. Permanent Magnet Synchronous Motor System Modeling and Simulation of SVPWM[J] based. Electrical and Mechanical Engineering,2009,26(7):77-82.
[5] 秦忆.现代交流伺服系统[M].武汉:华中理工大学出版社,1994:53-77. QIN Yi. Modern AC servo system[M]. Wuhan: Huazhong University Press,1994:53-77.
[6] 陈荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004. CHEN Rong. Research on servo system of permanent magnet synchronous motor[D]. Nanjing: Nanjing University of Aeronautics & Astronautics,2004.
[7] 贺益康.交流电机调速系统计算机仿真[M].杭州:浙江大学出版社,1993:32-35. HE Yikang. Computer simulation of AC motor speed control system[M]. Hangzhou: Zhejiang University Press,1993:32-35.
[8] 李永东.交流电机数字控制系统[M].北京:机械工业出版社,2012:113-137. LI Yongdong. Digital control system of AC motor[M]. Beijing: Mechanical Industry Press,2012:113-137.
[9] Tokuo Ohnishi. Three phase PWM converter/inverter by means of instantaneous active and reactive power control, IEEE,2011:163-177.
[10] Maiti S, Chakraborty C, Sengupta S. Simulation studies on modelreference adaptive controller based speed estimation technique for thevector controlled permanent magnet synchronous motor drive[J]. Simulation Modelling Practice and Theory,2009,17(4):585-596.
Simulation of PMSM Vector Control System
LANG Baohua1KANG Biao1SUN Luyan2
(1. School of Electronic Information Engineering, Xi’an Technological University, Xi’an 710021)(2. Northwest Industrial Group Co., Ltd, Xi’an 710043)
Vector control of permanent magnet synchronous motor control system is very important in a controlled manner, by analyzing the mathematical model and the permanent magnet synchronous motor vector control theory, Matlab/Simulation is used to build a simulation model of PMSM vector control system, PMSM vector control system is simulated and experimentally analyzed, by comparison simulation and experimental results demonstrate the validity of the simulation model and correctness of the control algorithm, a theoretical bosis is provided for permanent magnet synchronous motor control system design and commissioning.
PMSM, vector control, Matlab/Simulink simulation
2016年9月9日,
2016年10月17日
陕西省教育厅基金项目(编号:2016GY-074)资助。
郎宝华,男,博士,副教授,研究方向:高精度交流电机控制、嵌入式系统等。康标,男,硕士研究生,研究方向:永磁同步电机调速系统。孙鲁艳,女,助理工程师,研究方向:系统工程和企业管理。
TP273
10.3969/j.issn.1672-9722.2017.03.011
