基于卡尔曼滤波的轨道小车速度估算方法
2017-03-30李雄
李雄
(昆明船舶设备研究试验中心,昆明650051)
基于卡尔曼滤波的轨道小车速度估算方法
李雄
(昆明船舶设备研究试验中心,昆明650051)
针对在轨道上运行的小车由于车轮打滑和锁死所引起的速度测量误差,在分析基于卡尔曼滤波算法的车轮速度信息和车身加速度信息融合处理方法的结构及算法基础上,提出了一种基于模糊卡尔曼滤波算法的轨道小车速度估算方法。运用模糊控制思想,根据测量值和估算值之间的差值,在线调节观测噪声的方差值,优化卡尔曼滤波器参数,达到轨道小车速度的精确测量。这种通过车轮测速装置测量出车轮的旋转速度和加速度计测量车身的加速度并采用卡尔曼滤波算法测速方法,是对轨道上运动小车的一种新型测速方法。轨道上的运动小车测速系统需要克服车轮跳动、丢码及惯性测量等引起的误差。
轨道小车;信号融合处理;模糊控制;卡尔曼滤波;算法;测量
1 引言
目前轨道运动体速度的测量方法主要有车轮速度传感器、多普勒测速雷达、电磁计程仪等。其中,速度传感器适用于轨道运动体高速运动时的速度测量,雷达则在轨道运动体低速和车轮发生空转或打滑时测量更加精确,它们均能在适用的环境下达到较好的测量效果。因某项目试验需要,要求对轨道小车的速度及加速度进行高精度测量,由于环境的特殊性,上述几种测速方法均存在不同的局限性,难以达到测量要求[1]。文章充分了考虑项目的试验环境特性,提出以下测速方法,如图1所示。
系统配备了一套车轮测速装置和一套加速度计,通过车轮测速装置测量出车轮的旋转速度,加速度计测量车身的加速度,两种信号经过处理器融合处理,最终得到轨道小车的速度值。
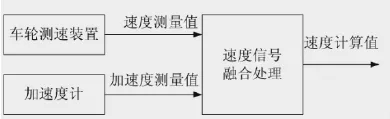
图1 测速原理图
系统很好的克服了车轮跳动、丢码及惯性测量等引起的误差,达到了良好的测量效果。
2 测量原理
2.1 车轮测速装置及加速度计
车轮测速装置通过测量车轮旋转的频率进而计算出小车运动的速度,结构简单、易于实现,但受环境影响较大,当车身颠簸或车轮打滑时,测量精度较低。加速度计通过测量小车车身的加速度,通过积分计算得出速度值,但在安装时需要有较好的水平度,且在长时间工作时会导致测量误差积累,影响测量精度[2]。
2.2 算法结构
通过单一的测量方式并不能达到良好的测量效果,文章提出一种将测量所得的速度值和加速度值通过卡尔曼滤波算法进行信息融合,通过调节不同工况条件下,测量所得的速度值和加速度值在卡尔曼滤波器所占权重,达到速度值的精确测量。
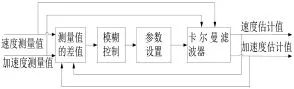
图2 基于模糊控制的卡尔曼滤波器结构
3 模糊卡尔曼滤波器的算法设计
3.1 卡尔曼滤波器推导及设计
小车车轮在行进过程中的打滑和车轮挤压形变均会对计算的准确性产生影响,速度的真实值和计算值的相互关系为速度的测量值由速度的计算值和测量噪声组成,即其中为速度的测量噪声。同理,可得加速度的测量值其中为加速度的测量噪声[3]。
在此假设速度和加速度的测量噪声为平均值为零的高斯白噪声(线性随机微分系统,过程和测量都是高斯白噪声)。
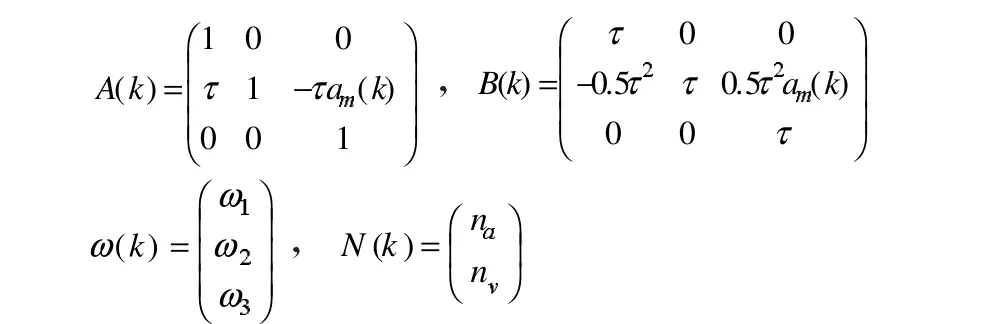
根据上述关系,可得卡尔曼滤波的离散化方程为:

其中:

根据卡尔曼滤波的递推算法可得:状态的一步预测方程(基于系统的上一个状态):

协方差的一步预测:

滤波增益方程:

滤波估计方程:

滤波协方差更新方程:

3.2 实际情况下的速度估计
3.2.1 加速度测量误差
小车加速度计由于安装不水平或在导轨上行驶时车身颠簸而产生测量误差,但由于在滤波算法中加速度值主要在速度测量出现大的偏差时起修正作用,且其本身测量误差值并不大,故将加速度计的测量值近似等同于真实值处理[5-6]。
3.2.2 速度测量误差
当小车处于加速运动或车轮与导轨结合不良时均会产出车轮打滑和锁死的现象,速度的测量值因此会有较大波动,需要利用合理的算法去除相关影响[7]。
3.3 基于模糊控制的卡尔曼滤波参数整定
轨道小车在正常行驶时,固定参数的卡尔曼滤波器能够很好的滤去测量误差,估计小车的速度,但当小车车轮打滑或测速传感器因环境干扰而有所偏差时,固定参数的卡尔曼滤波器则不能很好的反应小车的真实速度。此时,就需要根据工况不同,通过改变测量噪声协方差R的值改变速度值和加速度值的权重,进而调整小车的速度估计值[8]。
其中,对应的协方差越大,则说明该测量值越不可靠,在卡尔曼滤波算法中所占的权重越小,反之亦然。
4 结束语
针对轨道上的运动小车提出了一种新型测速方法,基于卡尔曼滤波算法将测得的速度和加速度信息融合起来。根据不同工况,运用模糊控制思想,根据测量值和估算值之间的差值,在线调节观测噪声的方差值,优化卡尔曼滤波器参数,达到轨道小车速度的精确测量。
[1]邓自立.信息融合滤波理论及其应用[M].哈尔滨:哈尔滨工业大学出版社,2007. Deng ZhiLi.Information fusion filtering theory and application [M].Harbin:Publishing House of Harbin Institute of Technology,2007.
[2]秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998 Qin Yongyuan,Zhang Hongyue,Wang Shuhua.Kalman and the principle of integrated navigation [M].Xi'an:Northwestern Polytechnical University press,1998.
[3]孙枫.组合导航系统[M].哈尔滨:哈尔滨工程大学出版社,1996. Sun Feng.Integrated navigation system[M].Harbin:Harbin Engineering University press,1996.
[4]刘通.基于模糊卡尔曼滤波的车速估计方法研究及硬件实现[D].吉林:吉林大学,2011. Liu Tong.Research and hardware realization of vehicle speed estimation based on fuzzy Calman filter[D].Jilin:Jilin University,2011.
[5]催平远,黄晓瑞.基于联合卡尔曼滤波的多传感器信息融合算法及其应用 [J].电机与控制学报,2001,5(3): 204-207. Cui PingYuan,Huang XiaoRui.Multi sensor information fusion algorithm based on joint Calman filter and application [J].Journal of motor and control,2001,5(3):204-207.
[6]严建鹏,陈小强,候涛.基于改进联合卡尔曼滤波算法的列车测速信息融合 [J].铁道科学与工程学报,2012,9(2): 89-93. Yan Jianpeng,Chen Xiaoqiang,Hou Tao.Train speed information fusion based on improved combined Kalman filtering algorithm [J].Journal of Railway Science and engineering, 2012,9(2):89-93.
[7]付梦印,邓志红,张续伟.Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2010. Fu Mengyin,Deng Zhihong,Zhang Xuwei.Kalman filtering theory and application in navigation system[M].Beijing:Science Press,2010.
[8]KERR TH.Decentralized filtering and redundancy management for multisenor navigatio[J].IEEE Trans on Aerospace and Electronic Systems.1987,23(1):83-119.
[9]SPEYER JI.Computation and transmission requirements For a decentralized linear-quadratic-Gaussian control problem [J].IEEE Trans on Automatic Control,1979,24(2):266-269.
Estimation Algorithm of Rail Vehicle Speed Operation Based on Fuzzy-Kalman Filter
Li Xiong
(Kunming Ship-borne Equipment Research and Test Center,Kunming 650051,China)
In view of measurement error caused by wheel slippage or locking on the vehicle operation on the rail,the structure and the algorithm of fusion processing method of wheel speed information and acceleration information,based on kalman filter algorithm,are discussed,and an estimating method of speed based on kalman filter algorithm is presented accordingly.According to the difference between measured value and estimated value,the fuzzy control theory is used to perform on-line adjustment for the observation noise variance value and optimize the kalman filter parameters for speed precise measurement of rail vehicle.A new speed measurement method,combining with the wheel speed measurement device for the wheel rotation speed,the accelerometer for the vehicle acceleration and the Kalman filter algorithm,is performed for track moving car.The moving vehicle speed measurement system on rail is required to overcome the errors caused by the wheel beat,the lost code and the inertia measurement.
Vehicle;Information fusion;Fuzzy control;Kalman filter;Algorithm;Measurement
10.3969/j.issn.1002-2279.2017.01.014
TP273
A
1002-2279-(2017)01-0057-03
李雄(1979-),男,云南省宣威市人,工程师,学士,主研方向:水下航行体综合保障设备研制与开发。
2016-08-4
