基于Simulink的电力测功机算法模型研究
2017-03-29邵方阁郭朋彦刘子川申方
邵方阁 郭朋彦,2 刘子川 申方
(1.华北水利水电大学机械学院,河南郑州 450045;2.华北水利水电大学车辆与新能源技术研究院,河南郑州 450045)
基于Simulink的电力测功机算法模型研究
邵方阁1郭朋彦1,2刘子川1申方1
(1.华北水利水电大学机械学院,河南郑州 450045;2.华北水利水电大学车辆与新能源技术研究院,河南郑州 450045)
根据交流电力测功机工作原理,搭建基于直接转矩控制技术的交流电力测功机数学模型;根据转矩和磁链需求,设计最优电压矢量开关控制表,输出电压矢量来控制IGBT模块的开关频率,从而控制三相交流电机的电磁转矩。在电动状态下,通过对三相交流电机调速来拖动负载到一定转速;在发电状态下,通过设置不同的工作模式进行各个工况点的测试。最终基于Simulink平台对算法模型在交流电力测功机动态加载特性的实现进行论证。
直接转矩技术;电压矢量开关;算法模型;动态加载
随着车辆工程及重型机械设备等自动化产业的日益发展,对测试设备的功能性、可操作性和稳定性的要求也越来越高。电力测功机不仅能够实现倒拖功能,还同时具备测试设备在低速和高速工况下的测量动态误差小、稳定性高等优点;在结构上,由转矩观测器模型可以观测出实时转矩,实现机械结构上的简化。与其他测功机相比,电力测功机在性能和维护方面都有较好的优势。将现代交流测功机技术应用于电机性能测试领域,可以充分发挥其优异的转速和转矩控制特性,以及动态响应快、结构灵活多样、高效节能、可靠性高等优点[1]。此外,交流电力测功机可以工作在电动和发电状态,可以利用直接转矩控制技术进行转速和转矩控制。直接转矩控制技术是继矢量控制技术之后发展起来的一种新型高性能的交流变频调速技术,其具有瞬态响应良好,受电机参数变化影响小等优点[2],克服了转子磁场定向控制时产生的鲁棒性差,转子磁链不易精确观测,矢量变换过于复杂等问题[3]。
1 三相交流电机电压电流检测
交流电力测功机的主要控制对象为三相异步交流电动机,也是本次控制算法的对象模型,本次设计搭建了基于dq0坐标系的三相交流电机动态物理模型[4],该模型以转子为中心建立动态坐标系,将模型简化为直流电机模型,有着较稳定的动态性能。建立算法模型时只需要检测其输出的电压、电流、转速。电压为逆变器模型中的IGBT开关电路输出的三相电压,电流为三相交流电机模型输出的三相电流,为了减少磁链及转矩的复杂程度,在本着不同坐标系下磁动势一致的原则下对其进行坐标变换,得到其在αβ静态坐标系下的电压和电流。
2 直接转矩技术方案
直接转矩控制技术就是直接控制三相交流电机的电磁转矩,根据检测到的三相交流电压和电流,利用观测器检测出此刻磁链和转矩的瞬时响应值,与设定的Te*和ψ*进行比较,根据差值的变化和输入磁链所在扇区即可根据map寻找最优电压矢量开关,电压矢量开关对逆变器的IGBT电路进行驱动,得到不同扇区下的开关响应,以此来控制定子磁链的旋转速度,从而直接控制其输出电磁转矩的大小[5]。为了减小系统脉动,利用PI转速-转矩控制进行系统空间矢量的补偿[4]。直接转矩控制原理如图1所示。
2.1 磁链观测器
磁链观测器采用u-i-n观测模型,该模型将u-i模型与i-n模型结合使用。
u-i模型是根据定子电阻来进行观测,如式(1)所示。在高速时,定子反电势较大,us值较大,而定子电阻上的压降相比很小,所以可以忽略,可以近似用式(2)来表示。在高速时,采用该模型可以较精确地进行观测。
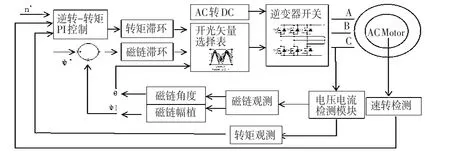
图1 直接转矩原理框图

当转速较低时,反电势较小,us值较小,定子压降此时较大,加上一些温度、耦合等误差,使得输出的值几乎为误差的积分。所以,此时的观测值非常不稳定,在低速时一般采用i-n模型来进行观测。
i-n模式下,定子磁链与定子电流由转速来决定,在低转速时,测量的精度误差小,可以很准确地估计磁链。但是,在高速时转速测量误差增加,此时应该采用u-i模型来进行观测[6]。
2.2 转矩观测器
三相交流电机的定子磁场在两相静止坐标系下的电磁转矩公式如下:
将磁链观测器观测的磁链分量代入转矩公式(3),即可得到转矩,此即为无转矩传感器的转矩观测。其中,对于磁链的估计是算法精度的核心,采用低高速协调估计是目前最广泛采用的方案。磁链观测器不仅仅影响圆形磁链的稳定性,还会影响转矩的输出。可见,磁链的精确估计对提高电力测功机整体稳定性和实时响应起着关键作用。
3 电压矢量控制
根据定子电流与转子磁链的推导关系可得:

将转矩公式里的定子电流用转子磁链来替代,推理可得:

在直接转矩控制中一般保持定子磁链的幅值不变,而转子磁链由负载决定。所以,只需改变磁通角θ,即可改变电磁转矩的大小。转子的转速一般由被测机决定,所以通过控制逆变器的开关频率来调节定子磁链的旋转速度,即可实现对磁通角的控制。
三相交流电机的驱动是根据逆变器开关的不断切换来产生旋转磁场,根据逆变器驱动电路可知其IGBT有8种开关状态,在星形接法和幅值恒定情况下,在电机的三相上,其输出电压的合成Park矢量式为:

将不同的开关状态代入即可得到对应的电压空间矢量。除了2个零矢量电压位于原点外,其余6个电压矢量的幅值均为2Udc/3,根据每路开关输出电压合成如图间隔60°角分布。当电压矢量选择模块接收到转矩和磁链差值时,经过比较输出1、0和-1信号,作为其判断转矩和磁链变化的标志,根据磁链观测器可以推导出此时的磁链矢量,从而得出其旋转角度,进而判断所在扇区,两者结合,按照给定最优电压矢量开关状态表即可得出此时的开关矢量。
4 仿真分析
实验选择三相交流电机的额定功率为37kW,频率50Hz,额定转速为1 450r/min,定子绕组阻值为0.082 33Ω,定子自感为0.724mH,转子绕组阻值为0.050 3Ω,转子自感为0.724mH,互感值为0.027 11H,转动惯量为0.37kg·m2。
当选择测功机模式为恒转速模式时,其输出的转速保持恒定,电力测功机通过调节踏板开度来调节转矩,测功机输出转矩随负载转矩变化。在转速恒定时进行加载试验时,模拟负载转矩线性上升,0.8s时选择发动机工况点为100N·m,1 600rpm,随着油门开度增大,负载转矩的增加,测功机输出的转矩也随之增加,从而保持恒速模式,在1.5s时将负载转矩随时间增加到设定值150N·m,加载过程完成,实现加载。测试其输出转矩、转速和磁链图像,结果见图2、3、4。

图2 转矩变化曲线
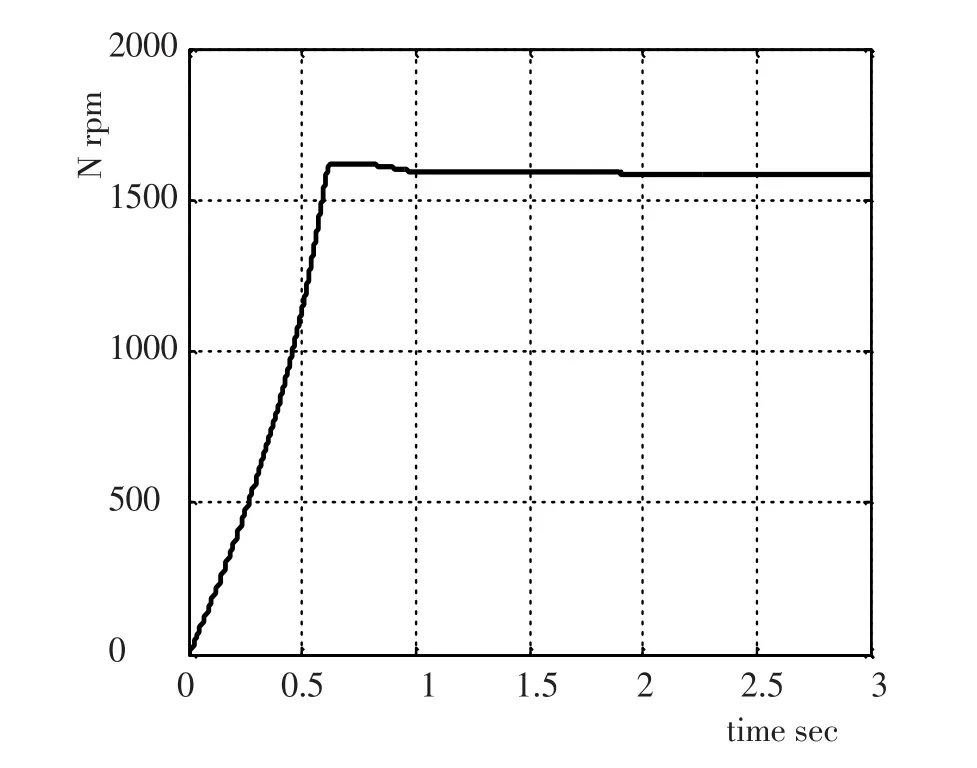
图3 转速变化曲线
由图4可知,测功机输出转矩随负载变化跟随性较好,圆形磁链稳定,证明该直接转矩算法可以稳定控制三相交流电机实现倒拖、加载等功能,其转矩输出的瞬态响应特性能力较好,转速变化±3rpm内,稳定的输出可以满足现在发动机测试的要求。
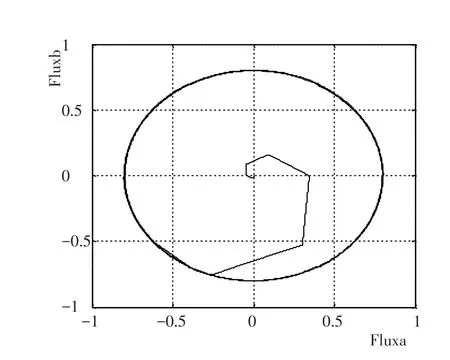
图4 磁链变化曲线
5 结论
本次仿真以三相交流电力测功机的恒转速控制工况为背景,首先进行了三相交流电机的对象模型分析,确定了直接转矩技术方案。根据对象模型输出的三相电压电流推导出其在两相静态坐标系下的电压和电流,再利用对象模型公式推导来建立其磁链和转矩观测器,根据磁链矢量确定其所在扇区,结合磁链滞环和转矩滞环得出最优开关电压矢量,在最优矢量下得到磁链和转矩的快速响应。本次建模将直接转矩算法和现在的三相交流电力测功机相结合,在仿真测试中论证了算法的科学性和可行性,对于电力交流测功机控制的实现具有一定的指导意义。
[1]李宗帅,董春,刘颜.国内外电力测功机发展现状[J].电机与控制应用,2007(5):1-4.
[2]黄智宇,鲜知良,李景俊,等.基于模型开发方法的电动汽车永磁同步电机矢量控制算法研究与应用[J].电机与控制应用,2014(6):45-50.
[3]范杰,王明渝,刘述喜.基于直接转矩控制的测功机动态负载研究[J].微特电机,2007(8):55-57.
[4]Ye Z,Li L,Garces L,et al.A new family of active antiis⁃landing schemes based on DQ implementation for grid-connected inverters[C]//IEEE Power Electronics Specialists Conference,2004(1):235-241.
[5]Buja GS,Kazmierkowski MP.Direct torque control of PWM inverter-fed AC motors-a survey[J].Industrial Electronics IEEE Transactions on,2004(4):744-757.
[6]Xu Z,Rahman MF.An adaptive sliding stator flux observ⁃er for a direct-torque-controlled IPM synchronous motor drive[J]. Industrial Electronics IEEE Transactions on,2007(5):2398-2406.
An Algorithm Model Study of Electric Dynamometer Based on Simulink
Shao Fangge1Guo Pengyan1,2Liu Zichuan1Shen Fang1
(1.Mechanics Institute,North China University of Water Resources and Electric Power,Zhengzhou Henan 450045;2.Institute of Vehicles and New Energy Technology,North China University of Water Resources and Electric Power,Zhengzhou Henan 450045)
According to the working principle of AC electric dynamometer,the mathematical model which based on direct torque control technology was built,the optimal voltage vector switching control table based on the torque and flux demand was designed,the switching frequency of the IGBT module was controlled by the output voltage vector, thereby the electromagnetic torque of the three-phase AC motor was controlled.In electric mode,by adjusting the three-phase AC motor speed to drag the load to certain speed;In the power generation state,by setting different oper⁃ating modes to test each operating point.Finally,based on the Simulink platform,the realization of the algorithm mod⁃el in the dynamic load characteristics of AC power dynamometer was demonstrated.
direct torque;voltage vector switching;algorithm model;dynamic load
TM933
:A
:1003-5168(2017)01-0057-03
2016-12-23
河南省教育厅科学技术研究重点项目资助计划(13A460693);华北水利水电大学大学生创新计划项目资助(HSCX2014112)。
邵方阁(1989-),男,硕士,研究方向:车辆、发动机测试。
