一种四点机电调平系统的虚腿补偿控制策略与机电联合仿真分析
2017-03-27舒亚海庄文许李珂翔
舒亚海,庄文许,李珂翔,杨 猛
(1. 海军驻江南造船(集团)有限责任公司军事代表室,上海 201913;2. 中国船舶重工集团公司第七二四研究所,南京 211153)
一种四点机电调平系统的虚腿补偿控制策略与机电联合仿真分析
舒亚海1,庄文许2,李珂翔2,杨 猛2
(1. 海军驻江南造船(集团)有限责任公司军事代表室,上海 201913;2. 中国船舶重工集团公司第七二四研究所,南京 211153)
针对雷达车四点机电调平系统的调平和“虚腿”问题,通过分析调平系统的几何特性和受力特性,给出了调平后各撑腿支撑力的优化解,提出了一种使用伺服电机绕组电流估算支撑力的方法。基于该优化解和绕组电流的关系设计了一种“虚腿”补偿控制策略,使得雷达车在调平过程中和调平后4个支腿始终保持合理的支撑力,从而避免产生“虚腿”,提高雷达车的安全性,并通过机电联合仿真验证了该控制策略的有效性。
雷达车;机电调平系统;虚腿;联合仿真
0 引 言
雷达车是车载机动雷达的重要组成部分,其调平系统是影响雷达系统工作性能和安全的关键因素。为保证雷达系统的工作性能,要求其具有较高的调平精度;为保障雷达系统的机动性和安全性,要求其具有较快的调平速度,并使各支撑腿受力均衡(即消除“虚腿”)。如果各支撑腿受力极不均匀或者产生“虚腿”,将破坏雷达车的稳定性,在外部扰动载荷作用下,可能发生车体振荡、倾覆、整体位移等诸多不利影响,将严重影响雷达车的安全性。特别是对于四点支撑调平系统,“虚腿”带来的危害更为明显。文献[1-2]针对液压调平系统,对支撑腿支撑力和平台水平姿态采用双闭环控制,获得了快速平稳的调平效果,且通过实时检测各支撑腿的支撑力来避免“虚腿”。这种方法对于没有力传感器的机电调平系统不适用。文献[3-4]所阐述的雷达天线车调平系统采用直流电机为执行元件,先读取电流值判断支腿是否触地,然后进行调平过程,靠调节支撑腿伸长满足的几何条件来保证无“虚腿”。这种方法具有一定的效果,但其能否使得支腿受力均匀尚没有验证。
一种常见的雷达车采用机电调平四点支撑方式,其支撑腿执行机构使用交流伺服电机驱动的电动推杆。本文的研究基于该类型雷达车,采用基于角度误差的调平控制方法[5],设计一种调平控制策略和控制流程,控制策略中引入电机电流进行“虚腿”的补偿控制,通过机电联合仿真手段验证该方法的调平性能。
1 问题描述
车载四点机电调平系统的俯视简图如图1所示。支腿按照矩形布置,编号如图所示。图中a,b分别为矩形沿y轴和x轴方向的边长,a0,b0为系统重心距离矩形边的距离。图中所示的坐标轴固定于平台之上,定义平台先绕x轴的转角为α,在该姿态下再绕y轴的转角为β。

图1 车载四腿调平系统简化示意图
初始时刻,雷达车停在倾斜的地面上,由其轮胎支撑。本文的任务是设计一种控制策略,将平台调节至水平状态,且使得4个支腿的支撑力分布均匀。
2 调平控制策略与虚腿补偿控制设计
2.1 支撑力测量
为了防止出现“虚腿”且使得调平后各支撑腿受力均匀,控制策略中必须包含支撑腿的支撑力。这里不使用力传感器直接测量支腿的支撑力,而是通过伺服电机绕组等效电流来估计支撑力大小。
丝杆螺母的受力图可以展开成平面问题(如图2所示),三角楔形表示螺纹,螺杆的推力等效于作用在螺纹面的力,表示成g,三角楔形向左移动(假设此时伺服电机正转),则螺杆上升,反之则下降。图2中,g为螺杆作用在螺纹面上的压力;gv为g在垂直于螺纹面上的压力分力;gh为g在平行于螺纹面上的压力分力;f为作用在三角楔形上的水平推力,用于在半径为r的力臂上产生螺杆扭矩;p为 螺杆螺距;r为 螺杆半径;θ为 螺纹螺旋角。
图2 螺纹面受力图
假设螺旋副接触面的摩擦系数为μ,三角楔形与基座的摩擦系数为0。容易证明当μ>tanθ时,令f=0,该机构能自锁,电动支腿具有自锁功能,因此这里默认μ>tanθ来说明两种情况下f与g的关系。
(1) 三角楔形匀速向左移动时(按照假设,此时螺杆上升,伺服电机正转),满足

(1)
(2) 三角楔形匀速向右移动时(按照假设,此时螺杆下降,伺服电机反转),满足

(2)
式中C为常量,为螺旋传动的静摩擦力。可见,电动支腿处于静止状态时不能从支腿电流来估计支撑力的大小。但是,当支腿运动时,如果C所占的份额较小以致可以忽略其影响时,推力f与g成正比,f与伺服电机绕组等效电流成正比[6],因此可以通过检测低速运行时的绕组电流来估计支撑力的大小。这里不加证明地使用式(1)估计。事实上,为了使载车平台在水平状态时不产“虚腿”且合理分布各支腿的支撑力,这里不需要计算支撑力大小,只要在低速运行时使各电机绕组电流达到理论值的一个给定邻域即可。
2.2 支撑力优化计算
按照图2所示,各支撑腿螺杆作用在螺纹面上的压力用gij(i=1,2;j=1,2)表示,作用在三角楔形上的水平推力用fij(i=1,2;j=1,2)表示,相应的伺服电机绕组电流用Iij(i=1,2;j=1,2)表示,当支撑腿将轮胎抬离地面并低速运行时满足式(1),进而有
(3)

(4)
联合式(3)和式(4)得
(5)
式(5)的超静定问题有4个变量3个方程,因此解不是唯一的,优化解满足变形协调方程,该方程为
(6)
式(5)~式(6)的解是存在且唯一的。

(7)
方程组式(7)的解是容易得到且唯一的。
2.3 调平控制流程
调平系统的调平分两个阶段:第一阶段是雷达车就位后,4条支撑腿伸长,使轮胎脱离地面;第二阶段是调平。调平控制流程如图3所示,描述如下:
(1) 通过伺服电机带动支撑腿以较高速度向下移动,当伺服电机电流骤然增大至给定阈值后,判定该条支撑腿触地,则停止相应伺服电机转动,当4个支撑腿均触地后,进行步骤2;
(2) 低速伸展4条支撑腿,将轮胎抬离地面,检测绕组电流并按照式(7)计算调平后各伺服电机的优化绕组电流值,进行步骤3;
(3) 根据状态反馈量(载车平台姿态、电机轴位置、速度和绕组电流)进行调平,至载车平台处于水平状态,且各支撑腿伺服电机绕组电流达到优化值的一个邻域内。

图3 调平控制流程
2.4 调平控制策略
本文的调平系统采用最高点不动法和角度误差调平控制相结合的控制策略进行双向调平;支腿的运动基于比例控制,引入支腿电流进行虚腿的补偿控制,最终保证载车平台处于水平状态,无虚腿(超静定问题的一组优化解),且满足系统的其他设计指标。
支腿伺服电机工作在速度环,用Vcmdij表示对应支腿伺服电机的速度指令,控制器设计为
3 机电联合仿真与结果分析
3.1 仿真模型说明
仿真采用Adams+Matlab/Simulink进行。首先,分别在Adams软件和Matlab软件中建立调平系统的机械系统模型和执行机构的数学模型;然后,分别在Adams软件和Matlab软件中建立机械系统和控制系统之间的传递变量;最后,在Matlab软件中编写调平控制策略并进行机电联合仿真。
在Adams中建立雷达车调平系统的机械模型(如图4所示),主要包括载车平台、地面和4组支撑腿子系统。在载车平台轮胎与地面、支撑腿与地面之间建立接触关系。支撑腿子系统采用交流伺服电机通过减速器带动支撑腿螺母转动,进而实现支撑腿伸展。当支撑腿接触地面后,平台姿态将根据模型的几何关系进行调整。
图4 雷达车调平系统在Adams中的机械模型
在Matlab/Simulink中建立交流伺服电机仿真模型[7]。将Adams中所建立的机械模型与Matlab/Simulink中建立的伺服电机模型在Matlab/Simulink中集成,建立机电联合仿真模型,其原理图如5所示。交流伺服电机数字模型与雷达车的Adams机械模型之间通过变量传递系统状态和控制指令,在S-函数中编写调平的控制策略。
图5 雷达车调平系统机电联合仿真原理图
3.2 结果与分析
如图4所示,初始时刻,地面处于水平状态,雷达车由车轮支撑置于地面并处于水平状态。首先使地面绕x轴旋转2°,绕y轴旋转1°,使得雷达车随着地面姿态发生变化,然后进行调平控制。
仿真结果如图6~图7所示。图6是雷达车绕x轴和y轴的倾角变化曲线。图7是雷达车4个支撑腿的受力曲线。0~2s的时间内雷达车绕x轴和y轴的姿态随地面发生变化,分别倾斜2°和1°;t=2s时开始调平,4个支撑腿同步伸展,支撑腿11首先接触地面并停止运动。这从图7中支撑腿11受力曲线在t=14s时的变化可以看出来。同时,图6中平台绕两个轴的倾角也发生微小变化。t=70s时所有支腿开始接触地面,然后开始调平。t=130s时完成调平,雷达车处于水平状态,且4个支撑腿的受力均较大,消除了“虚腿”。
图6 x轴(α)和y轴(β)倾角变化曲线
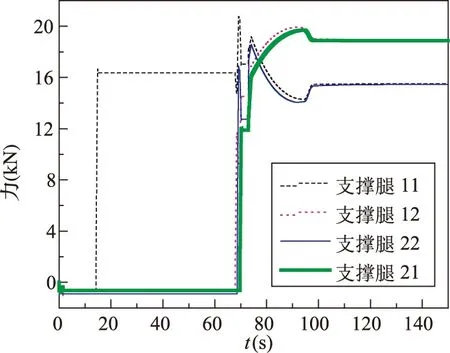
图7 支撑腿受力曲线
4 结束语
针对四点机电调平系统的“虚腿”现象,本文设计了一种基于伺服电机电流的“虚腿”补偿控制策略,并通过机电联合仿真验证了所设计控制策略的有效性。在分析四点机电调平系统的几何特性和受力特性的基础上,计算了调平后各撑腿支撑力的优化解,提出了一种通过伺服电机绕组电流估算支撑力的方法。最后设计了一种基于角度误差的双向调平控制策略,在其中引入了“虚腿”补偿电流反馈控制策略,并通过机电联合仿真验证了该控制策略的有效性。仿真结果显示,雷达车沿两个轴的倾角渐近收敛至0点,且4个支撑的受力分布较均匀,消除了“虚腿”。
[1] 万其.雷达载车双闭环调平系统设计[C]//中国电子学会电子机械工程分会2007年机械电子学学术会议论文集,2007.
[2] 凌轩.雷达天线车自动调平系统设计[J].液压与气动,2008(4):1-4.
[3] 卢朝双.高精度机电式车载雷达平台调平控制系统的研发[D].电子科技大学硕士学位论文,2007.
[4] 程玉清.雷达天线车全自动机电调平系统研究与设计[D].南京理工大学硕士学位论文,2007.
[5] 韩洋洋.冷发射装置结构动力学试验平台的调平系统设计与仿真研究[D].南京理工大学硕士学位论文,2007.
[6] 陈威.一类双电机同步驱动伺服系统的高性能控制策略研究[D].南京理工大学博士学位论文,2014.
[7] 庄文许.基于内模原理的某舰载火箭炮操瞄系统控制研究[D].南京理工大学博士学位论文,2013.
Weak leg compensation strategy and electromechanical jointsimulation for a four-leg electromechanical leveling system
SHU Ya-hai1, ZHUANG Wen-xu2, LI Ke-xiang2, YANG Meng2
(1.Military Representatives Office of the PLA in Jiangnan Shipbuilding (Group) Co.,Ltd.,Shanghai 201913;2. No.724 Research Institute of CSIC, Nanjing 211153)
In view of the leveling and "weak leg" problem of the four-leg electromagnetic leveling system of the radar vehicle, the optimal solution is given for the supporting force of each leg after the leveling through the analysis of the geometrical and mechanics characteristics of the leveling system, and a method of using the winding current of the servo motor to estimate the supporting force is proposed. A "weak leg" compensation control strategy is designed based on the relationship between the optimal solution and the winding current, making each leg bear proper force during and after the leveling, to avoid "weak leg" and improve the safety of the radar vehicle. The effectiveness of the control strategy designed is verified via the electromechanical joint simulation.
radar vehicle; electromechanical leveling system; weak leg; joint simulation.
2016-12-22;
2017-01-10
舒亚海(1976-),男,工程师,研究方向:信号与信息处理技术;庄文许(1985-),男,高级工程师,博士,研究方向:机电系统设计;李珂翔(1986-),男,高级工程师,硕士,研究方向:雷达结构设计;杨猛(1991-),男,助理工程师,硕士,研究方向:雷达结构设计。
TN959.71
A
1009-0401(2017)01-0055-05
