基于三模冗余的运载火箭增压控制设备设计
2017-03-27祁锦媛
刘 倩,李 亮,李 雷,祁锦媛,胡 斌
(上海宇航系统工程研究所,上海 201109)
基于三模冗余的运载火箭增压控制设备设计
刘 倩,李 亮,李 雷,祁锦媛,胡 斌
(上海宇航系统工程研究所,上海 201109)
目前某型号运载火箭增压输送系统采用机械式控制方式,该方式调试难度较高、误差较大;为此提出了一种基于三模冗余的数字式增压控制设备方案;该增压控制设备采用3个完全相同的处理单元进行压力数据采集及处理,在每个处理单元中,由数字式压力传感器进行贮箱压力测量并传送给单片机;通过单片机进行软件滤波和数据分析判读处理,输出控制信号;采用高可靠硬件表决单元对单片机输出的控制信号进行三取二表决,输出最终的电磁阀控制结果;试验表明,该增压控制设备易于调试和测试,测量精度在1%以内;该增压控制设备已完成样机研制,具有较高的通用性及可靠性。
三模冗余;增压控制;数字式传感器;容错技术
0 引言
航天事业的发展关系到国家命运和在世界上的发言权,目前,美国和欧洲等航天强国致力于研发大直径、大运载能力、高可靠性、无污染、易操作的新型运载火箭。为顺应这一趋势,中国相继研发一系列新型运载火箭,以提高我国运载火箭的运载能力。其中,无污染、高性能的液氧/煤油发动机和氢氧发动机是我国新型运载火箭系列的基本动力。2015年9月20日,由我所抓总研制的长征六号运载火箭“一箭二十星”首飞成功,开启了新一代运载火箭的新纪元,实现了我国在无毒无污染液氧煤油发动机领域的关键技术突破。
增压系统是液体运载火箭的重要分系统之一,用于提供火箭推进剂贮箱气枕压力,从而满足发动机起动及飞行过程中所需的推进剂入口正常的工作压力,并满足火箭推进剂贮箱薄壁结构承载所需要的内压要求,保证贮箱结构有足够的强度和刚度。在工作过程中,增压气体进入推进器贮箱,膨胀后占据推进剂排出后的空间,对液体推进剂产生工作压力[1]。
目前,某新型运载火箭助推模块采用液氧/煤油发动机,为常温氦气闭式增压方式,增压气体由高压气瓶经主副路增压器进入贮箱增压[2]。箱压反馈方式为压力信号器+继电器,其中,压力信号器通过测压管与贮箱气枕连接,根据贮箱压力进行动作,当贮箱压力高于压力信号器设定上限值时,压力信号器触点断开,控制器断开电磁阀供电,电磁阀关闭;贮箱压力低于压力信号器设定下限时,压力信号器触点闭合,控制器接通电磁阀供电,电磁阀打开。压力信号器为机械结构,通过调整弹簧旋入量来调整压力基准值,调试难度较大,不同批次产品之间的参数误差也较大;在进行振动试验时,压力信号器易出现超差现象;对于同一压力信号器,其控制压力点固定,当压力控制带发生变化时,需要配套新的压力信号器,通用性较差。
为适应当前运载火箭密集发射的形势,需要研制一种新型增压控制设备,以提高测压精度、降低调试难度、缩短研制周期,进而达到批量生产,提高产品以及系统可靠性的目标。
1 系统设计
新型增压控制设备通过压力传感器进行箱压测量,系统方案示意图见图1。三路压力传感器分别对贮箱压力进行实时测量,增压控制设备接收实时压力数值并进行处理,输出主路和副路电磁阀控制信号。

图1 增压系统压力传感器控制方案示意图
增压控制设备采用三模冗余设计,这是一种常用的硬件冗余技术,3个模块同时工作,执行相同的功能,利用表决器进行判断并产生最终输出结果。该技术可以将故障有效的屏蔽起来,3个模块中只要不同时出现两个相同的错误,就能保证系统正确输出。由于3个模块是相互独立的,有两个模块同时出现故障的概率非常低,因此可以大大提高系统的可靠性。
该种控制方式取消机械式压力门限判断方法,采用压力传感器监测贮箱压力,并通过RS485数字总线输出,可以提高压力测量精度;由增压控制设备进行增压控制,仅需要修改软件,就可以灵活设置和调整贮箱压力控制带,提高产品的通用性;通过在软件中存入压力校准信息,配合数字式测试设备,便可以完成整个系统的调试,极大的降低调试难度。
2 硬件设计
增压控制设备原理框图如图2所示,增压控制设备由3个完全相同且相互隔离的处理单元以及两个表决单元组成。

图2 增压控制设备原理框图
增压控制设备中设置3个完全相同的处理单元接收压力数值。对于每个处理单元来说,压力采集模块通过RS485总线实时采集压力传感器的输出,根据传感器输出与贮箱压力的转换关系获知当前的贮箱压力值,并将该值与设定条件进行比较,得出当前的控制结果。每个处理单元对应一个贮箱压力传感器输入,可分别输出主路和副路两路控制信号。3个处理单元组成三模冗余,其输出的控制信号经主路和副路表决单元进行三取二表决输出,从而完成电磁阀的驱动工作。
2.1 压力传感器选型
贮箱压力作为增压输送系统的一项重要指标,其测量的准确性对贮箱压力的正确控制具有重要作用。考虑到测量精度和实际使用的环境要求,选用的数字式压力传感器量程为0~0.6 MPa,工作温度范围为-40~60℃,全温区误差不大于1%F.S。该传感器由敏感组件和变换器两部分组成,可将测量到的压力数据编帧后通过RS485异步串行通讯接口输出。
使用数字式压力传感器进行贮箱压力测量,具有稳定性好、准确度高、抗干扰能力强的优点。由于采用标准RS485接口,不需要进行信号转换,可直接与后续压力采集模块进行总线通讯,从而简化硬件电路设计,降低产品体积和功耗,提高设计可靠性。
2.2 压力采集模块设计
压力采集模块中选用8位微控制器AT89C51进行逻辑控制,单片机及其外围电路的连接示意见图3。AT89C51最高工作频率为30 MHz,具有一路全双工的串行口,外接RS485接口芯片SNJ55LBC176后可以与数字式压力传感器进行通信。单片机接收到压力数据进行处理后,输出主路和副路控制信号。为增强驱动能力,输出信号经达林顿阵列SG2003进行输出。
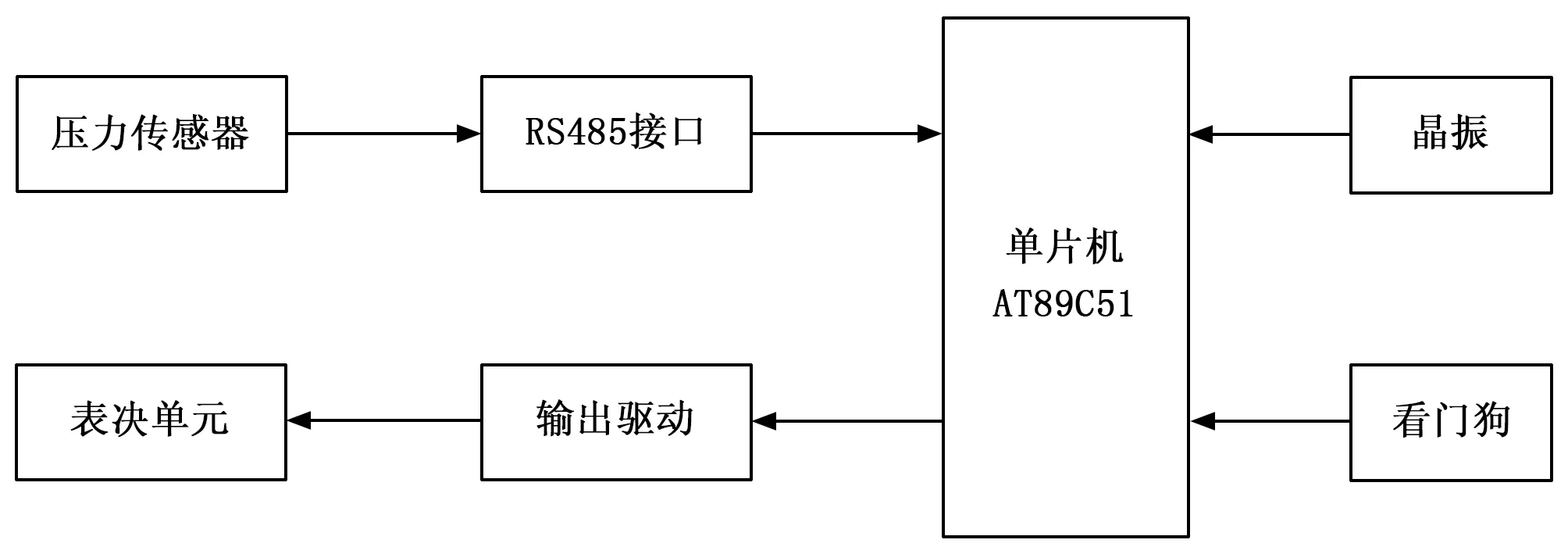
图3 增压控制设备原理框图
为防止软件跑飞、死循环,在硬件上设置看门狗电路,选用芯片MAX813L,当CPU不能在1.6 s内给出喂狗信号时,MAX813L输出时长为200 ms的复位信号至CPU。该芯片还可以对电源信号进行监控,当电源电压不满足门限要求时,对单片机进行复位。
2.3 表决单元设计
对三模冗余系统而言,表决单元的可靠度是至关重要的。表决电路的实现需要简单可靠,以免由于其可靠性影响到整个系统的可靠性。本设计采用继电器触点来实现表决,继电器为无源器件,可以避免受到电源、环境等不利影响[3]。另外,由于表决单元需对电磁阀进行驱动,电磁阀工作电流较大,通过选用合适的继电器可以直接驱动电磁阀,省去驱动电路设计,简化硬件资源。
增压控制设备中包含两个表决单元,分别对主路和副路电磁阀进行通断控制。表决单元原理见图4。每个表决单元包括6个继电器,继电器线圈正端接电源,负端接CPU输出的控制信号,继电器触点之间进行串并联以实现三取二表决。通过使用该表决结构,单个处理单元或单个继电器发生故障时,都不会造成表决失效。
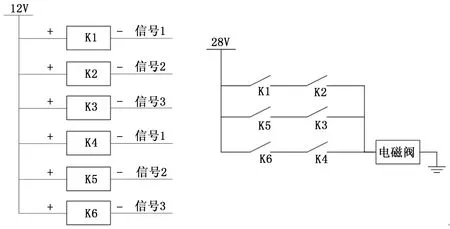
图4 表决单元原理图
2.4 电源模块设计
每个处理单元配置一个独立的电源模块,用于产生控制单元所需的5 V电压、压力传感器所需的±15 V电压以及表决单元中继电器所需的+12 V电压。为达到更高的安全性,保持模块间的独立性,利用3个隔离电源模块保证3个处理单元相互隔离。
3 软件设计
增压控制设备中的软件主要实现以下功能:接收压力传感器数据,当接收到的压力值PC小于压力值下限时,打开电磁阀;当接收到的压力数据大于压力值上限时,断开电磁阀;当压力值在上限和下限之间时,电磁阀保持上一开关状态。软件流程图见图5。程序开始时,单片机先进行各功能模块初始化,此时电磁阀被置为初始状态。然后单片机开始接收传感器数据,并根据接收到的数据进行贮箱状态判断及电磁阀控制信号输出。
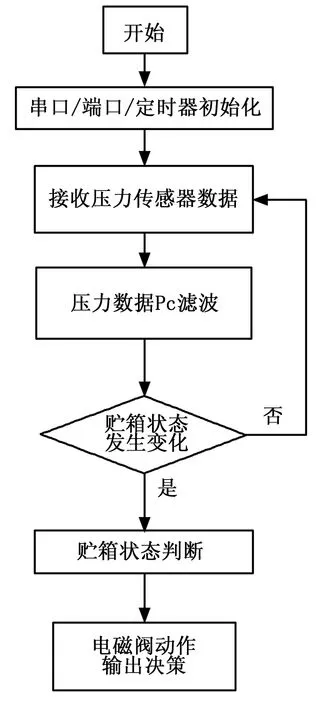
图5 软件流程图
3.1 压力数据接收设计
压力数据接收的可靠性和准确性对贮箱压力控制至关重要,设计时主要采取两个措施:一是在串口数据接收时时采取滑窗判断方式,从而可靠识别数据帧,防止出现丢帧现象。另外,传感器进行数据采集和传输时,可能受到周边环境的干扰,造成数据误差。因传感器输出的信号为数字信号,在设计时采取数字滤波来抑制干扰。根据压力数据采集的特点,采用中位值、平均值复合滤波算法,具体算法如下:单片机连续接收N次传感器数据,去掉最大值和最小值,然后求剩余N-2个数据的平均值。采用该种滤波算法可以同时滤除尖峰脉冲和持续时间较长的干扰信号[4],适用于进行压力数据采集。
3.2 贮箱状态判断设计
在进行贮箱状态判断时,设主路电磁阀压力值上下限分别为P4、P3,副路电磁阀压力值上下限分别为P2、P1,这样可以将整个压力数据带分为5个区间,每个区间对应一个状态。每当单片机接收到一个新的压力值PC,判断其处于哪一个区间,是否与前一状态发生变化。当压力状态发生变化时,进行输出状态变换;否则保持原状态不动。使用状态机进行编程,使程序简单易读,适用于进行贮箱压力的实时控制。
3.3 同步分析
三模冗余系统中的3个处理单元是相互独立的,能否保持其同步运行将直接影响整个系统的功能和操作的准确性。这种不同步一方面是因为输入信号的差异,3个传感器安装位置不同,所测压力值也具有一定的差异;另一方面是因为3个处理单元各自有独立的时钟。
对于传感器的安装差异,通过对增压系统中传感器具体安装位置的压力值进行试验测量,将各传感器测量差值存入软件,由软件进行校准。
对于时钟不同步,本设计采用松散时钟耦合方式,不额外添加时钟同步电路及信息交换电路,从而降低3个系统之间的耦合度,并降低系统的共模误差[5]。在这种模式下,通过调整传感器每个采样周期的采样个数,使得3个处理单元之间的不同步性对电磁阀的正确控制无影响。
具体分析如下:本系统中电磁阀的开关控制间隔最短为1 s,单片机每接收10次传感器数据(即20×10=200 ms)进行一次状态更新。假设处理单元1最先接收完10个数据,输出控制信号至表决单元,此时表决单元维持原状态;200 ms内,控制单元2也完成接收,输出控制信号;因为表决单元为三取二逻辑,此时表决单元可正确进行状态更新。可见,3个处理单元的最大时钟不同步为200 ms,小于电磁阀的开关控制间隔要求,该系统的时钟不同步性不会影响电磁阀的正确控制。
4 试验结果与分析
为验证增压控制设备的功能性能,设计生产了原理样机,并进行了单机测试及振动试验。试验时在上位机上采用Labview软件,接收压力传感器采集的实时压力数据,对电磁阀通断状态进行监测及显示,并按照实际使用环境要求进行振动试验,测试数据见表1。

表1 电磁阀开关门限测试数据
测试结果表明,该增压控制设备可以准确控制电磁阀开关状态,压力上下限控制精度在1%以内。该设备顺利通过振动试验,不会出现原有机械式测量方式在振动环境下超差的现象,具有较高的环境适应性。
5 结论
基于三模冗余的增压控制设备使用数字式压力传感器测量贮箱压力,可以通过软件设计来灵活设置和调整贮箱压力控制带,提高了压力测量精度,且一种产品可以满足不同类型贮箱压力控制的需求,解决了机械式压力信号器调试困难、难以产品化等缺点,同时可以提高压力测量精度。通过冗余设计,可以保证在一个处理单元发生故障的前提下仍能正确进行控制,提高了增压控制设备的可靠性,具有一定的先进性和推广价值。
[1] 范瑞祥,田玉蓉,黄 兵.新一代运载火箭增压技术研究[J].火箭推进,2012(8):9-10.
[2] 姚 娜,李会萍,程光平,等.新一代运载火箭推进剂贮箱的冗余氦气增压系统[J].上海航天,2014(2):42.
[3] 赵 舫,王国华.容错技术在微机变压器保护中的应用[J].浙江电力,1995(4):9.
[4] 向红军,雷 彬.基于单片机系统的数字滤波方法的研究[J].电测与仪表,2005(9):55.
[5] 潘 雷.三取二平台的时钟同步算法[J].铁道通信信号,2011.12:72-73.
Design of Tank Pressure Controller of Launch Vehicle Based on Triple Modular Redundancy
Liu Qian,Li Liang,Li Lei,Qi Jinyuan,Hu Bin
(Shanghai Institute of Aerospace System Engineering, Shanghai 201109, China)
The current launch vehicle pressurization system adopts mechanical control method, which is difficult for debugging and measurement error controlling. Therefore an electronic controller is proposed based on triple modular redundancy. There are three processing units for pressure data acquisition and processing. In each unit, tank pressure is measured by a digital sensor, and then transmitted to microcontroller. The data collected is handled by digital filters and intelligent interpretation to control the hardware voter. The control of electromagnetic is obtained by the two-out-of-three strategy. Through testing, the controller has good performance in debugging and testing, and the pressure accuracy is within 1%. The controller completed the prototype, and has high universality and reliability.
triple modular redundancy; pressurization control; digital sensor; fault-tolerant technique
2016-09-14;
2016-11-02。
刘 倩(1984-),女,河北沧州人,硕士,主要从事运载火箭电子设备设计方向的研究。
1671-4598(2017)03-0067-03DOI:10.16526/j.cnki.11-4762/tp
V
A