复杂自动化控制系统故障诊断方法研究与改进
2017-03-27明先承周红阳梅晓军
明先承,周红阳,梅晓军
(湖北三江航天红阳机电有限公司,湖北 孝感 432000)
复杂自动化控制系统故障诊断方法研究与改进
明先承,周红阳,梅晓军
(湖北三江航天红阳机电有限公司,湖北 孝感 432000)
近年来,自动化在工业生产、航空航天等不同领域得到了广泛运用,自动化控制系统随之孕育而生;自动化发展不断推进,长期生产使用中,传统自动化控制系统故障诊断方法出现多数据环境下故障诊断率低、多因素分析算法跟进力不足等问题;针对问题出现原因根源,提出复杂自动化控制系统故障诊断方法改进设计;采用数据罩筛引擎(GEP),对复杂自动化控制系统数据进行收集、整理、分析、模型创建;通过运行单元动态判断模块(DNGF)与多因素基准库(VSFVR)配合,完成对传统复杂自动化控制系统复杂环境下故障诊断方法的改进;通过仿真实验证明,复杂自动化控制系统故障诊断方法的改进,各项测试参数优于传统方法。
自动化;控制系统;模型创建;故障诊断
0 引言
近年来,科技产能工业化程度不断推进,促使自动化控制技术在各个领域广泛应用。从民营企业的工业生产,到国家高新技术开发,都离不开自动化控制技术。作为将人为意识转化为指令信号下达的自动化技术执行窗口系统[1],在长期的使用生产过程中发现,复杂自动化控制系统多部分协同工作存在故障诊断不明确[2]。缺乏针对故障数据收集、整理、分析的整体化模块。同时,在大规模生产过程中,造成复杂自动化控制系统故障的因素众多,传统方法未能及时针对故障发生因素的产生进行合理判断、动态分析[3]。传统自动化控制系统故障诊断方法中没有一套完整的故障对比库,造成无法在故障发生的第一时间做出科学合理的对比判断,未能最大化利用故障因素数据资源[4]。
针对上述传统复杂自动化控制系统故障诊断方法存在的一系列问题与不足,提出复杂自动化控制系统故障诊断方法改进的设计。将传统复杂自动化控制系统故障诊断方法存在的问题分为三部分进行完善设计,分别采用数据罩筛引擎(GEP)设计,对复杂自动化控制系统日常运行数据与故障产生环境下数据进行收集、整理、分析完成对故障数据前期的模型创建。通过运行单元动态判断模块(DNGF)设计,实时动态对比生产过程中的设备运行数据,完成数据模型对比带入。多因素基准库(VSFVR)的设计,有效解决传统复杂自动化控制系统无法充分利用故障数据的弊端。多因素基准库(VSFVR)可完成故障数据收集、故障数据应对、故障数据匹配三大功能,为运行单元动态判断模块(DNGF)准确判断提供强有力支持。
通过上述三大模块的设计采用,有效完成对传统自动化控制系统故障诊断方法的改进。形成了一套完整的复杂自动化控制系统故障诊断系统。通过仿真实验测试证明,提出的复杂自动化控制系统故障诊断方法改进设计,具有诊断准确率高、故障判断准确、可提供对应解决方案等优点。
1 复杂自动化控制系统故障诊断方法研究与改进
1.1 传统复杂自动化控制系统故障诊断方法研究
传统的复杂自动化控制系统故障诊断方法主要分为以下几种:
(1)参数估计法;
(2)状态估计法;
(3)基于信号处理的方法;
(4)基于小波变换的故障诊断方法;
(5)基于信息校核的故障诊断方法;
上述几种常用的传统自动化控制系统故障诊断方法都不同程度的存在一些问题。参数估计法与状态估计法在传统自动化控制系统故障诊断方法中存在故障识别判断准确率低的问题。因传统故障诊断方法中没有对比标准数据设立,一切数据结果皆是按照移动条件数据设定估计得出,缺乏故障数据分析准确性[5]。
基于信号处理的方法是传统故障诊断方法中故障判断较为准确的方法之一,但存在信号噪点干扰因素,限制了信号准确率。
基于小波变换与信息校核的故障诊断方法,完善了上述方法的准确率不足的问题与限制因素干扰问题的出现。但经常时间运行发现,基于小波变换与信息校核的故障诊断方法存在统一数据转换变流标签异常,时间与内核构造变换算法逻辑关系出现数据扭转膨化,导致自动化控制系统故障分析数据准确率失衡、数据收集链条断裂等严重问题。
故此,文章结合传统自动化控制系统故障诊断方法的优点,针对性进行方法改进设计,提出复杂自动化控制系统故障诊断方法改进设计。
1.2 复杂自动化控制系统故障诊断方法改进设计
1.2.1 数据罩筛引擎(GEP)
针对上述传统自动化控制系统故障诊断方法存在的问题,提出的改进方法中采用数据罩筛引擎(GEP)设计,用来解决故障数据收集整理上的一系列问题。数据罩筛引擎(GEP)设计针对自动化控制系统运行过程中指令数据收发回馈的检测、采集,利用偏心数据组合算法对复杂自动化控制系统运行数据进行分析,过滤,创建动态偏心数据模型。偏心数据组合算法吸收传统参数估计法与状态估计法两种常用估计法具有的数据状态数据处理有点,充分吸收处理系统运行过程中全部数据[6]。同时,创建罩筛数据模型,为后期的实际运行故障产生因素分析提供数据支持。数据罩筛引擎(GEP)设计采用的偏心数据组合算法关系式如下所示。
(1)
当故障数据结构i处于失衡边界值时,关系式动态调整为:
(2)

(3)
为了更好展现算法的涵盖性与处理性,数据罩筛引擎(GEP)采用简易语言进行执行引擎搭建,搭建执行代码如下所示。
include
int main( void )
{
printf( "分析! " );
return 0;
}
}
int KPLL(float a ,float b)
{数据搭建=1
return a/b;
上述为数据罩筛引擎(GEP)底层元和代码,为数据罩筛引擎(GEP)的最高创建代码。设计中为了完善引擎的数据模型创建数据点把握准度,将把握核心故障基准代码写入了数据罩筛引擎(GEP)二层底核心框架,代码如下:
include
using namespace std;
void read(int x,int *sp) //读入数组
{
for (x--;x>=0;x--)
cin>>sp[x];
}
void swap(int &a, int &b)
{
int t;
t = a;
a = b;
b = t;
数据罩筛引擎(GEP)工作流程原理如图1所示。
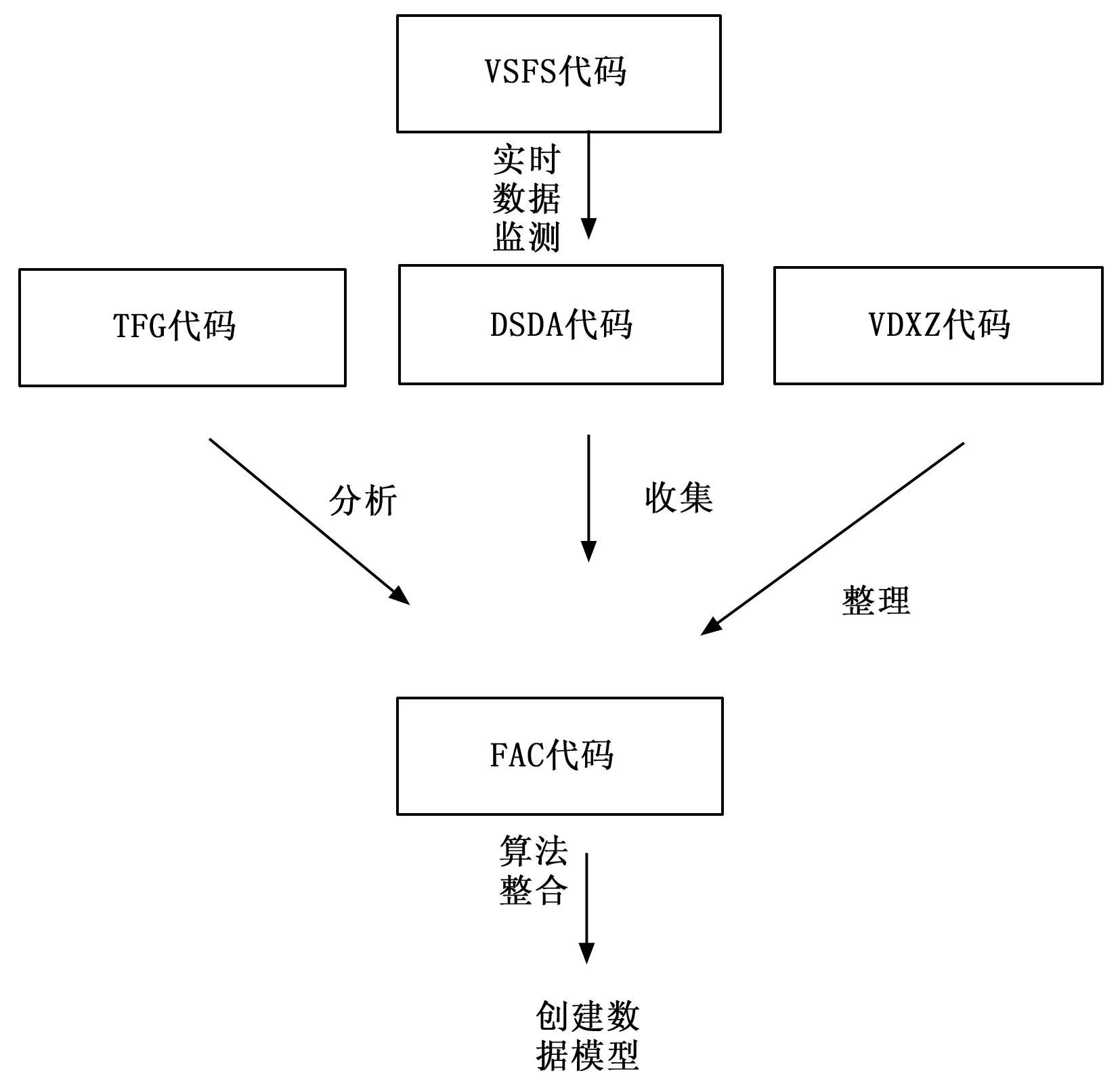
图1 数据罩筛引擎(GEP)工作流程原理
1.2.2 运行单元动态判断模块(DNGF)设计
运行单元动态判断模块(DNGF)是改进方法设计中起着承上启下作用的关键型改进设计。运行单元动态判断模块(DNGF)执行故障数据波动分析、判断职能。运行单元动态判断模块(DNGF)采用动态数据交互形式,可自行调整交互通道数量,复杂自动化控制系统各项运行数据经过运行单元动态判断模块(DNGF)分析、判断,动态校准数据模型。运行单元动态判断模块(DNGF)将数据模型动态分成ζ区域;每一区域分成ν∧个特征校准数据点;ζ∈nν∧,n为区域数量。当ζ内某一域出现数据异常,ν∧内特征校准数据点会生成回馈信号,运行单元动态判断模块(DNGF)会捕捉到回馈信号,迅速做出分析,判断自动化控制系统故障产生成因数据所在点,并给出相对解决方案。
运行单元动态判断模块(DNGF)设计吸收传统故障诊断方法中信号处理方法与小波变换诊断方法的算法优点,针对二者信号处理上的不足,进行算法逻辑优化,形成新的信号点处理判断算法—TZBD算法。算法关系式如下所示。
(4)

A,B,C,a,b,c本别为不同数据反馈信号量。
运行单元动态判断模块(DNGF)执行代码为三段式设计,首段为数据罩筛引擎(GEP)对接代码,负责数据模型资源调取对比。代码如下所示。
uploaded_file=_FILES['myfile']['tmp_name'];
move_to_file=_SERVER['DNGF']."/FileUpload/file/up/"._FILES['myfile']['name'];
//echo uploaded_file."--".move_to_file;
if (move_uploaded_file(uploaded_file,iconv("utf-8","gb2312",move_to_file))){
echo _FILES['myfile']['name']."GEP";
}else {
}
{结果反馈=1
}
尾段为动态判断调整代码,负责算法最终校准比对,做出准确结果数据输出,代码如下所示。
for(i=0;i scanf("%d",p+i); sort(a,n); printf("排序后的结果为"); for(i=0;i printf("%5d",a[i]); fflush(stdin); getchar(); return 0; } void sort(int a[],int n) { int i,j,k,min,index; for(i=0;i { 1.2.3 多因素基准库(VSFVR)设计 复杂自动化控制系统故障诊断方法改进的设计中增加针对故障发生数据收集储存的模块—多因素基准库(VSFVR),通过对复杂自动化控制系统故障产生状态数据的收集,分析,整理,归纳,储存完成故障数据最大化利用。 多因素基准库(VSFVR)采用交错空间设计,有下至上分为三层空间,下层数据静储空间;中层大数据方案载入空间;上层故障特征提取空间。3个空间相互独立,通过交错层内交互通道进行数据交换、提取。与上下两层不同,中层大数据方案载入空间设有一条独立高速大数据交互通道,保证实时、快速获取故障相应解决方案,提高故障诊断准确率。多因素基准库(VSFVR)工作原理如图2所示。 图2 多因素基准库(VSFVR)工作原理 多因素基准库(VSFVR)采用执行算法代码固化ISP方式,有效提高代码完整性,保证故障数据储存、交互过程中的逻辑稳定性。具体代码如下所示。 include include include include include define N 21 void gotoxy(int x,int y)//位置函数 { COORD pos; pos.X=2*x; void init(int apple[2])//初始化函数(初始化层数、故障特征) { int i,j;//初始化交互数据 int wall[N+2][N+2n]={{0}}; for(i=1;i<=N;i++) 至此,复杂自动化控制系统故障诊断方法改进设计全部完成。 针对复杂自动化控制系统故障诊断方法改进设计进行仿真实验测试。测试环境配置为:CPU i5 6200 主频3.4Hz,内存 4G,windows 10专业版操作系统。采用对比方式,分别采用传统故障诊断方法与提出改进后的故障诊断方法,对故障诊断处理速度、故障诊断准确度、故障预见判断准确率、故障数据收集率、故障相应解决方案数据资源提供率、多故障齐发诊断准确率、故障诊断运行资源开销状况、长时间连续运行稳定性等测试项目进行测试,并对结果数据进行分析,得出结论。解决了多数据环境下故障诊断率低、多因素分析算法跟进力不足等问题。具体测试参数如表1所示。 通过上述表1的测试数据可以证明,提出的复杂自动化控制系统故障诊断方法改进设计具有以下优点。 表1 仿真实验测试对比参数 1)故障诊断速度快、准确率高。 2)具有故障预见判断功能、预见判断准确率高。 3)能够有效利用故障数据资源,自创大数据解决方案设计。 4)整体性能稳定,运行资源开销小。 上述优点充分证明提出的复杂自动化控制系统故障诊断方法改进设计能够满足现今复杂自动化控制系统故障诊领域运用要求。 针对传统复杂自动化控制系统故障诊断方法存在的问题进行了分析,并对问题存在根源提出了复杂自动化控制系统故障诊断方法改进设计。通过仿真实验测试证明,提出的复杂自动化控制系统故障诊断方法改进设计各项测试数据都优于传统复杂自动化控制系统故障诊断方法,满足设计改进要求。为复杂自动化控制系统故障诊断领域未来发展提供新的思路。 [1] 庞志华.基于自动化控制的机械设备故障诊断系统设计[J].信息系统工程,2015,3(2):138-140. [2] 胡明国.自动控制中一种故障检测与报警的方法[J].山东工业技术,2016,9(10):206-208. [3] 申鸿烨.基于监测点与自动化测试的接收系统故障诊断[J].控制工程,2016,23(3):223-253. [4] 牟 放.浅析故障诊断技术在计量自动化系统中的应用[J].数字技术与应用,2014,2(9):216-210. [5] 李 娟.大型自动化控制系统故障报警技术应用研究[J].建筑工程技术与设计,2015,6(8):22-29. [6] 赵 鹏, 蔡忠春, 李晓明,等. 某型飞机发动机故障诊断专家系统设计[J]. 计算机测量与控制, 2014, 22(12):3850-3852. Complex Automation Control System Fault Diagnosis Methods Research and Improvement Ming Xianchen,Zhou Hongyang,Mei Xiaojun (Hubei Sanjiang Aerospace Hongyang Electromechanical Co.,Ltd.,Xiaogan 432000,China) In recent years,the automation in the industrial production,aerospace and other fields has been widely applied,automation control system emerges with the inoculation.Production automation development steadily,long-term use of traditional automatic control system fault diagnosis method in fault diagnosis rate is low,multiple data environment more follow up problems such as insufficient factor analysis algorithm.In view of the problem root reason,complex automation control system fault diagnosis method is put forward to improve design.Using data cover screen engine(GEP)for complex automation control system of data collection,sorting,analysis,model creation.By running the unit dynamic judgment module(DNGF)cooperate with multi-factor benchmark library(VSFVR),complete the traditional complex automation control system fault diagnosis method under complicated environment improvement.Through the simulation experiments show that complex automation control system fault diagnosis methods of improvement,the test parameters is better than the traditional method. automation;control system;model creation;fault diagnosis 2016-10-31; 2016-11-24。 明先承(1979-),男,湖北孝感人,硕士研究生,高级工程师,主要从事自动控制方向的研究。 1671-4598(2017)03-0036-04 10.16526/j.cnki.11-4762/tp.2017.03.011 TP273 A
2 实验与结论

3 结束语