智能小车控制系统设计
2017-03-27
摘 要 笔者以单片机MSP430F5438作为小车控制的核心,用直流电机当做驱动力,设计出一款智能小车同时运用脉宽调制的办法达到对车速的精确控制。结果显示,该智能小车能够达到两车防撞前后行驶、单车绕圈行驶以及两车在规定区域超车等功能要求,同时其性能比较稳定,抗干扰的能力较强。
【关键词】光电传感器 电机驱动 电子指南针 超声波传感器 智能小车
1 智能小车的硬件设计
1.1 硬件结构
小车的硬件结构运用MSP430F5438作控制器,以控制其无人驾驶系统,同时对小车内部AD所采得的数据予以处理,发出转弯、直走及超车等指令,以实现特定功能。设计小车的硬件运用RPR220光电传感器去测试拐弯或超车标志,运用超声波传感器去控制小车之间的距离,同时运用GY—26电子指南针对小车予以导航及定位。
1.2 电机驱动
运用L298N芯片做电机的驱动芯片,其中L298N为高电压、大电流的全桥驱动芯片,每个这种芯片能够控制2台直流电机,同时可控制其使能端。用这种芯片做电机驱动,其稳定性非常好,且性能非十分好,同时L298N结合单片机能够达到对小车速度的准确控制。借助接口发出PWM波,进而控制电机的转速,达到对速度的控制。
1.3 光电传感器
5通道灰度值传感器模块用RPR220的光电传感器作为探测器,一共可分成5路、 2行5列。借助对每一传感器数据进行检测,能够完成对十字路线、直线以及丁字路线的检测与跟踪。
1.4 超声波
超声波的发射以及接收都是独立式进行,本小车运用超声波发射器(型号为TCT40—16BT)以及超声波接收器(型号为TCT40—16BR),其能够向外发射大约40kHz的脉冲信号,输出端的电阻既能够增强反向器(型号为MC14069UB)的驱动性能,还能够提升超声器的阻尼作用,减少自由振荡的时长。
1.5 电子指南针
GY—26为低成本的平面数字罗盘,其输入的电压很低,功耗较小并且体积小。它的工作原理为借助磁传感器内的2垂直轴对地球磁场的感应磁分量,算出方位角度,该罗盘用RS—232及IIC协议和其它设备进行通信,起到重新标定的作用,可在任一位置获取精确的方位角,其波特率为9600bp秒,其输出方式分为连续和询问输出2种。
2 智能小车的软件设计
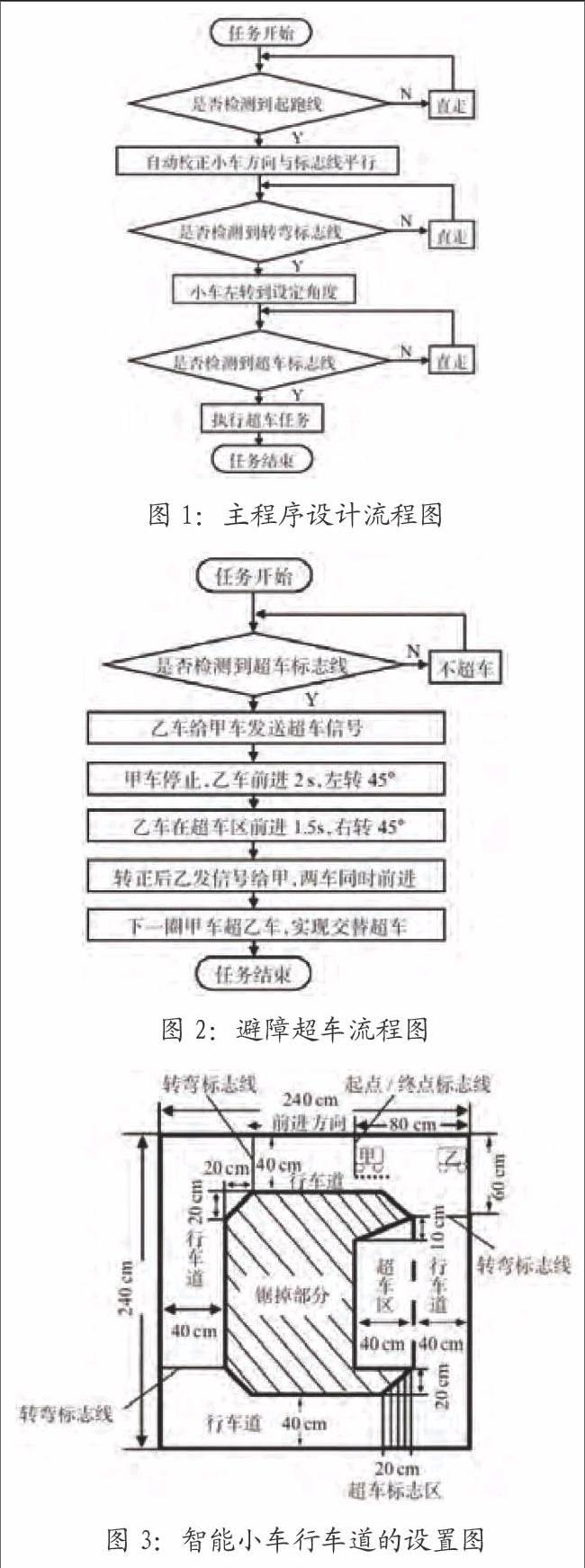
2.1 小车主程序
该小车功能的完成由指令进行控制,这些指令既能够通过传感器发出去,还能够通过下位机面板的按键予以控制,其主程序的设计流程见图1。
2.2 行车线路识别
当小车识别到转弯标志线之后,会一直沿着行车道向前直行,同时通过指南针对方向进行校正,而使其行驶方向和标志线之间呈直角。2个红外收发管置于灰度传感器的2侧,主要是用来检测行车道的边界,从而避免小车在行驶的时候超过边界。
2.3 避障超车
灰度传感器用来测行车道的边线,小车在行驶的时候通过超声波传感器来检测前方有没有障碍物,目的是避免两车相撞,避障超车的流程图见图2。2个车在行进1圈以后,在第2圈的时候要实现超车。智能小车利用车头的红外传感器来确定自己所在的位置,在第2圈检测为黑线数14的时候,说明小车已进入超车区。行进的时候借助超声波系统以控制2个车的距离,防止二者相撞。
3 系统测试
3.1 功能测试
第1组:A车与B车分别由起点开始,在行车道各自行驶1圈,在检测到第1个转弯之后,2个小车能够顺利的转动90°角。
第2组:A和B二小车按照图3中所示的二车分别的起跑线同时启动,B车经过超车标志线以后在超车区内完成超车的操作,并于A车到达终点线之前抵达,行驶所用的时间是12.6秒。
第3组:A和B二车继续行进第2圈,A车经过超车线以后要完成超车动作,并在B车到达终点以前到达。二车继续行进第3及第4圈,同时交互领跑。然后再设定A车的起始点,完成二车的交替领跑,行驶的时长一共为50秒。
3.2 测试结果
A车与B车各自从起点开始,在车道各自行驶1圈。当二车从起点同时启动,B车在超车区完成超车。二车行驶第2圈,之后A车超B车,完成交替领跑。二车继续行进第3与第4圈,继续交替领跑,行驶时长一共12秒。然后重设A车的起始点,完成二车4圈交替领跑。小车仅于超车区超车,超车之后可以返回行车道。
4 结论
结果可以看出,无人驾驶智能小车能够完成两车在规定区域完成超车、单车绕圈行驶、两车防撞前后行驶等,同时其性能十分稳定、抗干扰性比较强,未来将在无人驾驶系统中被应用。
参考文献
[1]梁明亮,孙逸洁.嵌入式智能小车的设计与实现[J].制造业自动化,2012,34(22):87-89,94.
[2]赵津,朱三超.基于Arduino单片机的智能避障小车设计[J].自动化与仪表,2013,28(05):1-4.
作者单位
1.东北林业大学机电工程学院 黑龙江省哈尔濱市 150040
2.山西大学计算机与信息技术学院 山西省太原市 030006
