基于动态联盟的多传感器协同探测与跟踪
2017-03-26许蕴山夏海宝邓有为张肖强
武 龙,许蕴山,夏海宝,邓有为,张肖强
基于动态联盟的多传感器协同探测与跟踪
武 龙,许蕴山,夏海宝,邓有为,张肖强
(空军工程大学航空航天工程学院,陕西 西安710038)
在空战场协同攻击中,常涉及到多传感器协同探测及跟踪,由于目标的出现与消失具有随机性,所以在协同中既要考虑已有目标的跟踪,更要重视新生目标的及时探测和捕获。为此,建立了新生目标的探测概率模型,并阐述了不同传感器联盟对新生目标的探测能力,依据后验克拉美-罗下界(Posterior Cramer-Rao Lower Bound,PCRLB)对已跟踪目标组建传感器联盟,利用二值粒子群优化(Binary Particle Swarm Optimization,BPSO)算法及PCRLB研究基于动态联盟的多传感器协同探测与跟踪方法。仿真表明,该方法跟踪精度较高,误差小且稳定。
协同跟踪;动态联盟;后验克拉美-罗下界;二值粒子群优化
0 引言
在多机协同攻击中,常需要考虑传感器对目标的协同探测及协同跟踪,由于传感器的多样性及量测信息的复杂性,目标的出现与消失变化多端,使得对传感器的高效利用面临严峻挑战。所以研究如何进行传感器对目标的科学分配,获得更优的协同探测与跟踪性能具有重要现实意义[1]。
文献[2]在无线传感器网络中基于多智能体理论和动态联盟方法建立了目标跟踪协同流程。文献[3]结合已有的任务分配机制,建立了一种改进的动态联盟协同任务分配机制,确立了盟主和盟员的选择方法。文献[4]为解决动态联盟在移动过程中的交接问题,提出了基于预测的修复机制,解决了目标航迹的机动性。文献[5]为解决多目标连续、高概率探测问题,建立了多传感器交叉提示多目标探测的动态联盟机制,但这些方法都没有考虑协同跟踪时新目标出现的情况。
本文考虑到协同跟踪时可能会出现新目标,建立了新生目标探测概率模型,分析了已跟踪目标的后验克拉美-罗下界,研究了基于动态联盟的多传感器协同探测与跟踪方法。
1 新生目标的探测概率模型
在多平台传感器的探测空域内,目标的呈现与消逝是无法预知的,与已跟踪目标相比,其对我机的威胁指数更大,重要性更强,因此需要及时分配传感器资源对新生目标进行侦查探测,已保证尽早对其截获。为了定量描述新生目标的探测概率,假设新目标均是从探测区域边界任意位置进入传感器探测范围,为方便研究,采用个在探测区域界线上等间距分布的粒子表示新生目标可能呈现的位置。当确定了目标进入探测区域的边界位置后,还需确定目标在探测区域内首次出现时距该位置的距离。假设新生目标进入探测空域界线的法向速度在[0,max]间服从均匀分布,则新目标首次呈现位置距进入点间距离的概率密度函数成式(1)表示的分布[6]:

式中:T为采样时间;表示粒子运动速度。传感器对粒子所代表的新生目标位置的探测概率p(,)可按式(2)计算:

式中:f表示虚警概率;(,)是传感器与粒子所代表的新生目标位置间的距离;0为传感器对0处目标的探测信噪比。则时刻新目标的探测概率表达式l为:

式中:表示探测空域内传感器总量;为采样时间;C∈{0,1},表示新生目标能够被传感器探测到,C=0表示其不能被传感器探测到;S表示是否采用传感器探测搜索新出现的目标,S=1代表选择该传感器搜索新生目标,反之亦然;S=[1t…S…S]代表一种传感器联盟,该联盟将完成新出现目标的探测及跟踪。根据式(3)计算的探测概率表示不同传感器组成的联盟对新生目标的探测能力。
2 已跟踪目标的后验克拉美-罗下界
PCRLB是衡量跟踪性能的一项指标,可通过计算传感器与目标的量测值及预估值而得到[12]。因为该指标与具体的目标航迹生成算法无关,所以能够避免跟踪滤波误差对传感器选择造成的影响[7]。所以利用PCRLB可得到不同传感器联盟跟踪目标所产生的信息增量,并据此选择合适的传感器加入联盟。
假定探测区域内某一目标运动的表达式为:
式中:表示传感器联盟中的第部传感器;z,m表示量测值;h为观测函数;v表示观测噪声;表示在探测区域内均匀分布的虚警量测值。


式中:{×}为(x,m,,m)的期望值;[×]代表矩阵转置。由上式可得--1为一半正定矩阵,称作Fisher信息阵[13],J-1即为PCRLB。
经线性化后计算得递推公式为:


3 动态联盟建模
盟员的优化组合是动态联盟组建过程中最重要的问题,合适的盟员能够通过各方取长补短提高动态联盟内各成员协同效果。盟员的选择需要综合考虑其特点、重要性等多方面因素,因此盟员的优化组合可以抽象为多目标函数的最优化问题,动态联盟的核心思想就是使目标函数取得最优值。本文采用二值粒子群优化算法[15]及PCRLB组建多传感器协同探测与跟踪动态联盟,二值即粒子速度取[0, 1],1表征将该粒子所代表的传感器纳入对目标的探测与跟踪动态联盟,0表示该粒子所表征的传感器未加入动态联盟。择取传感器的目的是调用尽可能少地量测资源获得更好的探测与跟踪效果,所以组建动态联盟要综合思量新出现目标的探测概率及已跟踪目标的跟踪精度,则动态联盟目标函数表达式为:

式中:tr[×]表征矩阵的迹;pl表征新出现目标的探测概率门限值;表征目标序号。利用二值粒子群优化算法组建动态联盟就是按照目标函数表达式,首先确保新生目标的探测概率大于门限值,同时从C中选择使已跟踪目标的PCRLB最小的传感器组合,C表示时刻传感器系统中能够跟踪目标的传感器集合[14]。
4 协同探测与跟踪步骤
假设当前传感器网络已经捕获探测空域内的所有目标,当新目标出现时,多传感器立即组建动态联盟,进行新目标的探测与已有目标的跟踪,步骤如下:
步骤1 判断目标是新生目标或已跟踪目标
判断目标是新呈现目标或已跟踪目标,若为新呈现目标,在新目标可能出现的区域内生成个探测粒子。
步骤2 组建新生目标传感器探测联盟
选择对新生目标的探测概率大于门限值的传感器加入新生目标探测联盟。
步骤3 组建已跟踪目标传感器跟踪联盟
在剩余传感器中按照PCRLB择取使已跟踪目标的跟踪精度尽可能高的传感器加入联盟。
步骤4 组建协同探测与跟踪动态联盟
按照动态联盟目标函数表达式综合考虑新生目标的及时捕获和已跟踪目标的精确跟踪组建协同探测与跟踪动态联盟;
步骤5 跟踪滤波与航迹生成
依据动态联盟观测目标运动,选择扩展卡尔曼滤波进行目标跟踪滤波,融合量测信息并生成航迹。
步骤6 判断是否需要更新动态联盟
若需要,返回步骤1,若否,更新时间=+1返回步骤5。
5 仿真验证与分析
为了验证文章研究内容的正确性及科学性,证明本文方法进行协同探测与跟踪时性能更优,因此在仿真时与文献[7]提出的防空雷达对多隐身目标的协同检测与跟踪算法进行对比。假设探测空域内有10个3种常用的传感器,观测噪声为零均值的高斯白噪声,3种类型传感器量测目标的距离误差依次为60m,320m和150m,角度差依次为(0.2°, 0.3°),(1.4°, 1.9°)和(2°, 3°),4个新生目标分别在0s,20s,30s,40s出现,目标1的初始运动参数为1=[1km, 1.5km,×sin(p/200)km/s,×tan(p/200)km/s],=0.5km/s为初始运动速度,=15°为初始角度,采样频率=1Hz。目标2、目标3和目标4均从探测区域边界随机进入传感器探测范围,初始运动速度分别在区间[0.2km/s, 0.3km/s],[0.3km/s, 0.4km/s],[0.4km/s, 0.5km/s]上服从均匀分布。目标探测虚警概率=2×10-5,粒子数取10,迭代运算进行20次。
图1是探测区域内3种类型传感器的位置部署及新生目标的运动轨迹,图2是扩展卡尔曼滤波对目标的跟踪结果,图3~图6是对目标的跟踪误差,由图可知,在新生目标出现时刻传感器对目标的位置估计误差均较大,这是因为仿真中采用两点法起始跟踪航迹,所以在目标出现时刻误差较大。通过比较两种方法对4个新生目标的位置误差,明显看到相比文献[7]的算法,本文提出的方法跟踪误差更小,精度更高。

图1 传感器分布位置及目标运动轨迹

图2 目标跟踪结果

图3 目标1跟踪误差(0s出现)
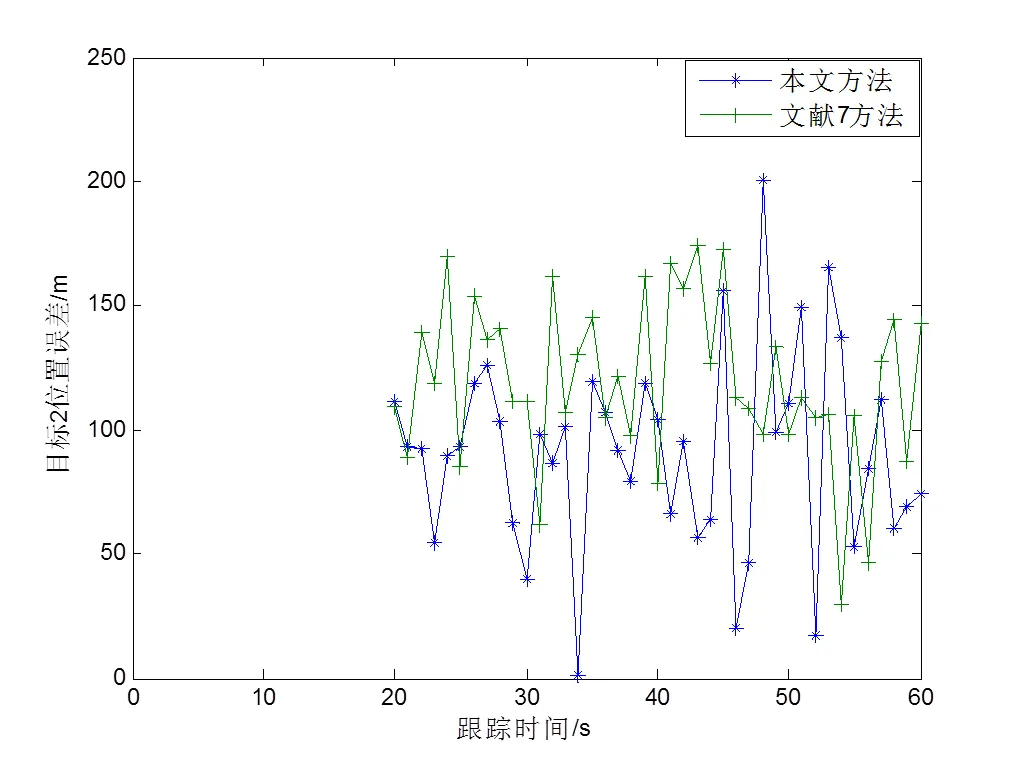
图4 目标2跟踪误差(20s出现)

图5 目标3跟踪误差(30s出现)

图6 目标4跟踪误差(40s出现)
图7~图10为协同探测与跟踪传感器动态联盟图,结合图3~图6,不难看到4个目标的位置估计误差起伏较小,比较稳定,这是因为选择了合适的传感器加入动态联盟对目标进行探测与跟踪,保证了良好的跟踪精度。

图7 目标1传感器联盟

图8 目标2传感器联盟
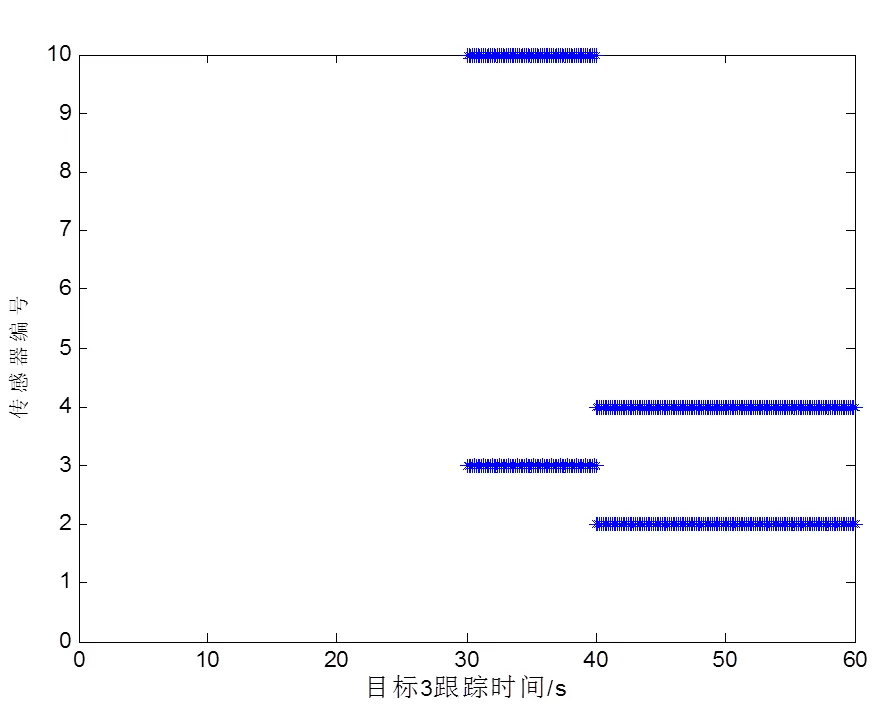
图9 目标3传感器联盟

图10 目标4传感器联盟
6 结束语
在空战场协同攻击中,目标的出现与消失是随机的,对此,文章建立了新生目标探测概率模型,分析了目标跟踪的后验克拉美-罗下界,并采用二值粒子群优化算法及PCRLB建立了基于动态联盟的多传感器协同探测与跟踪方法,仿真表明,该方法能够及时捕获目标,具有良好的跟踪精度,对协同空战有一定的指导意义。
[1] 罗开平, 姜维, 李一军. 传感器管理述评[J]. 电子学报, 2010, 38(8): 1901-1907.
LUO Kaiping, JIANG Wei, LI Yijun. Review of Sensor Management[J]., 2010, 38(8): 1901-1907.
[2] 庞华信. 无线传感器网络协同技术研究及在多目标跟踪中的应用[D]. 哈尔滨: 哈尔滨工业大学, 2008: 52-63.
PANG Huaxin. Research on Cooperation Method of Wireless Sensor Network and Application for Multi-target Tracking[D]. Haerbin: Haerbin Institute of Technology,2008: 52-63.
[3] YANG Chun, Kadar Ivan, Blasch Erik. Comparison of information Theoretic divergences for sensor management[C]//,, 2011, 8050: 1-9.
[4] Hintz K J, Mcvey E S. Multi-process constrained estimation[J]., 1991, 21(1): 434-442.
[5] 樊浩, 黄树彩, 高美凤, 等. 多传感器交叉提示多目标探测动态联盟技术研究[J]. 宇航学报, 2011, 32(11): 2382-2385.
FAN Hao, HUANG Shucai, GAO Rongfeng, et al. Research on Technique of Multi-target Detection Using Multi-sensor Cross-cueing Based on Dynamic Coalition[J]., 2011, 32(11): 2382-2385.
[6] Tharmarasa R., Kirubarajan T., Jiming P., etal. Optimization-based dynamic sensor management for distributed multi target tracking[J]., 2009, 39(5): 534-546.
[7] 刘钦. 多传感器组网协同跟踪方法研究[D]. 西安: 西安电子科技大学, 2013: 104-105.
LIU Qin. Study on Multi-sensor Collaborative Tracking in Sensor Networks[D]. Xi’an: Xidian University, 2013: 104-105.
[8] Ristic B, Arulampalam S, Gordon N.[M]. Boston: Artech House, 2004.
[9] ZHANG X. Decentralized sensor-coordination optimization for mobile multi-target tracking in wireless sensor networks[C]//.:, 2010: 1-5.
[10] 武龙, 许蕴山, 龙文彪. 一种多传感器协同探测的雷达跟踪系统[J]. 空军工程大学学报: 自然科学版, 2017, 18(1): 39-43.
WU Long, XU Yunshan, LONG Wenbiao. A Radar Tracking System Based on Cooperative Detection of Multi-sensor Resource[J].:, 2017, 18(1): 39-43.
[11] 陆福星, 李夜金, 赵云峰, 等. 天基红外动目标检测系统的仿真和评估[J]. 红外技术, 2017, 39(5): 452-454.
LU Fuxing, LI Yejin, ZHAO Yunfeng, et al. Simulation and Evaluation of Space-based Infrared Moving Target Detection System[J]., 2017, 39(5): 452-454.
[12] 邓立齐, 杨卫, 金晓会. 栅格化极坐标目标定位方法[J]. 红外技术, 2017, 39(3): 280-282.
DENG Liqi, YANG Wei, JIN Xiaohui. Rasterized Polar Coordinate Target Positioning Method[J]., 2017, 39(3): 280-282.
[13] 赵文哲, 秦世引. 视频运动目标检测方法的对比分析[J]. 科技导报, 2009, 27(10): 64-67.
ZHAO Wenzhe, QIN Shiyin. Comparative Study on Detection Methods for Video Motion Targets[J]., 2009, 27(10): 64-67.
[14] 李然, 王成, 苏国中, 等. 星载激光雷达的发展与应用[J]. 科技导报, 2007, 25(14): 59-62.
LI Ran, WANG Cheng, SU Guozhong, et al. Development and Applications of Spaceborne LiDAR[J]., 2007, 25(14): 59-62.
[15] Shirin K., Karim F., Amjad O.. Modified discrete binary PSO based sensor placement in WSN networks[C]//,, 2010: 200-204.
Multi-sensor Cooperative Detection and Tracking Based on Dynamic Coalition
WU Long,XU Yunshan,XIA Haibao,DENG Youwei,ZHANG Xiaoqiang
(,,710038,)
In cooperative attacks, multi-sensor cooperative detection and tracking is usually used. Because targets randomly appear or vanish, we should think about tracking new appearing targets and pay attention to detect or even capture new targets. Therefore, a probabilistic model for detecting new targets was established, stating the ability of different sensor coalitions to detect new targets. A sensor coalition for tracked targets was set up according to PCRLB, and the method of multi-sensor cooperative detection and tracking based on dynamic coalition using the BPSO algorithm and PCRLB was studied. The simulation result indicates that the method possesses higher tracking precision, less error, and more stability.
cooperative tracking,dynamic coalition,Posterior Cramer-Rao Lower Bound,Binary Particle Swarm Optimization
TP212.9
A
1001-8891(2017)11-0996-05
2017-06-16;
2017-10-14.
武龙(1993-),男,硕士研究生,研究方向为传感器管理。
许蕴山,教授,研究方向为雷达信号与信息处理,E-mail:yunshanxu@163.com
国家自然科学基金项目(61379104),航空科学基金项目(20155596024)。
