一种新颖的强海杂波背景下弱小目标鲁棒检测算法
2017-03-26袁耀东许红艳
袁耀东,许红艳,陶 琳
一种新颖的强海杂波背景下弱小目标鲁棒检测算法
袁耀东1,许红艳1,陶 琳2,3
(1. 郑州澍青医学高等专科学校 信息管理中心,河南 郑州 450008;2. 河南工业职业技术学院 电子信息工程系,河南 南阳 473000;3. 郑州大学 信息工程学院,河南 郑州 450002)
红外弱小目标的自动检测是光电火控系统、红外导引头等武器装备中的关键技术之一。本文针对复杂海杂波背景下低信噪比目标检测问题,结合SURF特征描述符,提出了一种基于自动聚类分割的弱小目标检测算法。该方法首先利用SURF算法计算出红外图像中的兴趣点,并将多帧的兴趣点投影到一帧中形成累积图。由于目标在红外序列中的连续性,目标点会在累积图中进行聚集;然后使用改进的快速聚类分割算法自适应的检测出疑似目标;最后根据目标类具有的大小约束与线性约束先验信息,从海杂波中区分出所需的弱小目标。大量仿真实验及实物验证表明,相比于其他现有算法,本文提出方法在处理具有较低信噪比/杂波比的视频下的弱小目标时可以获得较好的检测性能,同时该方法的实时性强,可在多项式时间复杂度下得到最优检测目标,适合工程应用。
红外弱小目标;海杂波;SURF特征描;累积图;聚类分割算法;目标检测
0 引言
随着红外成像技术的不断发展,红外热像仪已经广泛应用在红外遥感、目标探测、光电火控、精确制导等民用和军事领域中,具有隐蔽性、全天候、抗干扰等优点[1-5]。然而当红外热像仪距离目标较远时,获取的目标一般只有几个像素,图像的信噪比较低。相对于背景及噪声,目标信号的灰度较弱,还可能被噪声淹没。因此红外弱小目标检测技术是红外搜索与跟踪、红外告警、红外制导等防御、进攻等武器系统中的一项核心技术,其主要任务就是如何从复杂背景中检测并区分出微弱目标。
当前主流的弱小目标检测算法大致上可以分为检测前跟踪(Track Before Detection,TBD)算法和跟踪前检测(Detection Before Track,DBT)算法。TBD算法的基本思想是先根据目标像素强度检测出目标,然后通过目标在相邻帧之间时空相关性获取目标的运动轨迹,其典型算法包括形态学滤波[2],Top-Hat算子[3],小波变换[4]等算法。这类算法通常具有很强的实时性,非常适合具有高信噪比或高对比度下的红外目标检测系统中,但在信噪比较低的情况下,其虚警率较高,严重影响目标的识别。DBT算法则是采用一些目标跟踪的方法来提高目标检测的准确性,通过对序列图像同时进行跟踪判断,同时增强目标的信噪比,逐步剔除噪声影响,其经典算法包括序贯假设检验[5]、MSHT[6],三维匹配滤波[7]等。由于此类算法利用了多帧图像信息,会增加算法的时间复杂度与空间复杂度。特别是这类算法在构建初始轨迹时依赖于目标的动态先验知识,这直接影响算法在真实场景下的应用[8]。
近年来,小目标检测跟踪领域提出了非常多新颖可靠的算法。文献[9]中,作者引入稀疏与低秩的概念,将原始的图像视为由稀疏矩阵与低秩矩阵的构成,因此传统的目标检测算法就转变为低秩矩阵恢复问题。文献[10-11]假设目标具有较高的局部对比度,提出了一种基于分层学习的核方法。文献[12]提出了一种基于带通滤波器的目标显著性提取方法。文献[13]中,作者提出一种计算像素各邻域累计差异值获取测量图,以便检测出弱小目标。文献[14]则是利用目标与背景之间主曲率来检测弱小目标。最近,许多研究人员提出利用图像自相似性建立基于字典学习的稀疏模型,提出利用海量红外目标数据库构建一个空时过完备的字典,通过目标与背景在字典下的稀疏系数之间的差异,检测出所需的目标[15-16]。文献[17]则是提出一种协同稀疏重构模型,通过在线学习的方式来消除杂波与噪声的干扰。然而,虽然基于稀疏与低秩等先验信息的信号处理算法有着较强的弱小目标检测能力,此类算法在字典训练学习,优化求解的过程是非常耗时的,直接限制了该类算法在武器平台上的使用[18]。
通过以上分析可以看出,无论是传统的形态学算法,还是基于现代信号处理的智能算法,大多数红外弱小目标检测算法都是构建复杂背景下目标与背景之间的差异信息以实现鲁棒高效的检测算法。为了提高弱小目标检测算法的复杂环境适应性的能力,本文提出了以自动聚类算法为基础,并结合SURF算子的弱小目标检测算法。SURF是一种具有尺度,旋转不变的检测算法,对均匀缩放、光照变化等干扰影响也具有良好性能,能够从复杂背景条件下提取出疑似候选目标的鲁棒特征。本文提出的方法在复杂的海天背景下的弱小目标检测跟踪方面具有鲁棒稳定的性能,同时该方法可在多项式时间复杂度下得到最优检测目标,适合工程应用。
1 本文所提算法
本文以“XX对海弱小目标光电探测”预研课题为背景,对海杂波背景下红外弱小目标检测问题进行研究。针对复杂海杂波背景下低信噪比目标检测问题,结合SURF特征描述符,提出了一种基于自动聚类分割的弱小目标检测算法。本文算法包括如下3部分:①基于SURF算子的兴趣点的提取;②基于改进的聚类算法的累积图分割;③基于大小与线性约束下的目标鉴别。接下来,本文将对算法流程进行详细描述。
1.1 基于SURF算子的兴趣点提取
一般来说,红外图像(,)的数学模型由3部分组成,分别是背景图B(,),噪声图N(,)和目标图T(,),因此红外图像可以表示如下:
(,)=T(,)+B(,)+N(,) (1)
从实际红外图像可以看出背景图占整个检测图中绝大部分,存在大量的低频信息,而目标与噪声则是一些孤立的点目标,位于高频区域。然而,随着成像环境的变化,目标的大小和强度会发生剧烈变化,灰度、对比度等特征信息将不能用于弱小目标的检测,因此有必要采用一种更加健壮的特征。SURF是一种具有尺度旋转不变性的局部特征检测器和描述符,可以用于目标检测识别[18]。特别是,该检测算子对均匀缩放、光照变化等干扰因素也具有良好性能,能够从复杂背景条件下提取出疑似候选目标的鲁棒特征。因此,由于SURF对噪声和目标的鲁棒性,首先被用来提取单帧红外图像中的兴趣点,其具体计算过程可参考文献[18]。
1.2 累计图的构建
利用上一节介绍的SURF算子提取的图像兴趣点可能位于云的边缘,天际线、孤立噪声和候选目标上。由于目标的轨迹在一定的时间上具有一定的空间聚集性和时间相关性,受此规律先验的激发,本文提出将多帧目标的聚集特性作为疑似目标检测策略。为了实现目标轨迹点的累计,本文将多帧上的疑似目标投影到2D图像平面上。若暂不考虑灰度尺度情况下,这一过程可以用如下公式进行直观地描述:

式中:Ex是经过2.1节处理后的特征点图;是最大处理的帧长度。可以看出,(,)是特征点投影后的累积图,大量的仿真实验表明基于特征点的累计图具有明显的聚集效应。
弱小目标的检测的难点在与如何分辨噪声与点目标,实际红外图像可以看出,噪声点服从高斯分布,很难连续多帧位于同一位置附近,而点目标附近则聚集大量的特征点,因此采用聚类分割的方式可以找出疑似目标区域,同时排除虚假点目标。
1.3 基于改进的聚类分割算法的图像分割
由于目标轨迹在时空上具有局部聚集性,因此本文利用自动聚类算法将累积的原始数据集聚集成不同的类。显而易见,这些类包含了目标区域与非目标区域。在2014年,Rodriguez等人提出了一种快速的聚类算法,能够实时地计算出密集峰。因此,本文利用此方法快速搜索密集峰,并识别出聚类中心,该方法仅仅需要距离矩阵作为输入参数[19]。同时,该算法的假设条件是,聚类中心周围都是密度比其低的点,同时这些点与较高局部密度的区域之间有相对大的距离。

式中:如果<0,则()=1,否则()=0,同时c是自定义的截断距离,其值的选取参考文献[19]。
表示兴趣点与高密度点之间的最小距离,其表达式如下:

可以看出,所有比点密度高的所有点的最近距离表示,因此聚类中心是值非常大的点。在聚类中心被确定下来以后,每一个剩余点分配给与其较高密度的最近邻域相同的类。该聚类算法可以得到非球形的聚类结果,可以很好地描述数据分布。
图1描述快速聚类过程的示意图,其中图1(a)是累积图中所有特征点在二维空间的分布,图1(b)是以为横坐标,以为纵坐标获取的决策图(Decision Tree)。可以看到,1和10两个点的和都比较大,作为类簇的中心点;26、27、28三个点的也比较大,但是较小,所以是异常噪声点。可以看出,上述算法可以较快且鲁棒的方式获取聚类中心,同时抑制一些异常干扰点。然而,对于本文的应用而言,该算法存在的主要缺点是所采用的聚类算法会产生过分割或欠分割。这意味着多个目标轨迹会被分割到一类里面,或一个完整的轨迹被分割成多个类,这会对后续目标的选择带来影响。为了提高算法的适应性,提高累计图中特征点的聚类精度,本文提出了如下的改进措施:
1)为了应对累积兴趣点图的过分割现象,并确保一个目标跟踪路径散点被完全包含到一个类集,本文提出采用一个用于调节的参数,这意味着在数据集中该参数是点的邻域平均数,这可以帮助选择出合适的c。参数的值越大,聚类中心越多。显然,它影响分割粒度。根据工程的实际应用情况,本文提出:当参数等于轨迹点数的一半时,假设参数等于c时,那么可以获取完整的轨迹,同时具有最高的杂波抑制比(CSR)和目标提取率(TER)。CSR意味着杂波相对于聚类的比值,和TER则表示总目标提取的百分比。
2)为了解决欠分割的问题,确保一个类仅仅包含一个目标的轨迹,本文提出了一个参数,其表达形式如下:
相对于原始聚类方法,该改进措施有助于选择聚类中心。为了保证目标轨迹之间的“独立性”,本文选择的参数具有在聚类过程最高的正确分割率和杂波抑制比。
本文通过引入两个参数,解决了累积目标点聚类分割中存在的两种问题,并且提高了算法的适应性,支持聚类的自动实现。
1.4 基于大小与线性约束下的目标鉴别
自动聚类完成后,可以看出累积的图像已经被分割成两类:目标和杂波。本节中,将采用以下两种约束来完成目标的识别:
1)由目标轨迹形成的类的大小与长度有一定的相关性,但是杂波具有高斯随机性,不存在这样的特点。大量的仿真测试发现,该策略的大小的下限定义为序列长度的75%时,可以准确地检测出目标。
2)由于海杂波在空间上的分布是随机的,而目标的分布将满足一些线性分布特征,因此真实的目标点具备线性约束特性。
2 实验及其结果分析
本文采用空对海的红外探测器实物仿真时获取的4个低信噪比的红外图像序列检验本算法对弱小目标的检测性能。每个序列包含1000帧红外图像,图像大小为320×240,目标大小范围从2×1到12×12不等。实验方法都是使用MATLAB语言编程实现,并在CPU为i5处理器:主频2.86GHZ,内存4G,操作系统:WINDOWS 7,仿真平台Matlab 7.20平台上运行。
在本节中,为了客观公正地对本文提出的算法的可靠性与鲁棒性进行评判,选取了4种算法作为对比:Max-median[20],Top-hat算法[21],Sparse[16]和IPI[9]。Max-median算法是工程应用中使用较多的传统算法,可靠性高;Top-hat算法是利用形态学操作来去除图像中的随机噪声,以提高目标的信噪比;Sparse和IPI算法是最近几年发展出的最新算法,具有较高的检测精度,但时间复杂度较大。为了便于显示处理结果,实验部分调整红外图像的亮度。在图2左侧一列为红外原始图像,其目标在原始图像中用红色矩形标记。大量的仿真定性对比试验结果可以看出,传统的Max-median算法在背景较为复杂时,不能完全检测出弱小目标,同时由于噪声的干扰,检测结果会显示出虚警;Top-Hat算法则是利用形态学滤波方法,提升目标的信噪比,实际处理结果可以看出,该算法不仅提高了弱小目标的对比度,同时也放大了噪声信号,提高了虚警率。基于现代信号处理的Sparse[16]和IPI[9]算法在重构图像过程比较耗时,同时由于目标本身信噪比较低,在进行稀疏重构时会出现过拟合,不能完全由字典基原子进行稀疏表示,所以实验结果也可以看出,该类算法的漏检较多,同时也会出现一定的误检;本文提出的算法是在SURF兴趣点累积的基础上进行聚类分割,利用时空相关性对非目标类进行排除,达到完全红外弱小目标的实时检测。

图2 对比试验结果
为了定量评估本文提出的算法性能,选择了4段具有海天背景的典型红外视频进行处理的实验结果如表1,表2所示,其中表1展示了本文提出算法各处理模块的定量指标,尤其是经大小与线性约束后虚警率明显降低;表2展示了各算法的目标检测率与虚警率,其结果是序列中所有帧检测的平均值。从表1中的结果可以看出本文所提算法的有效性,除了第3个序列由于太阳闪烁干扰引起虚警以外,其他的序列情况都能得到满意的检测结果和杂波抑制率。从比较结果发现本文方法的检测结果具有优越的性能,并且保持了比其他方法更低的虚警率。由于传统弱小目标检测方法过于依赖目标的灰度强度或局部对比度,若信噪比降低,其检测概率将下降。由于云层干扰以及海面鱼鳞波的影响,各对比算法在杂波上会产生较大的误检。相比之下,IPI具有稳定的检测性能,但对于靠近海天线或部分被云遮挡的目标,将发生漏检,与本文方法相比,误报率更高。
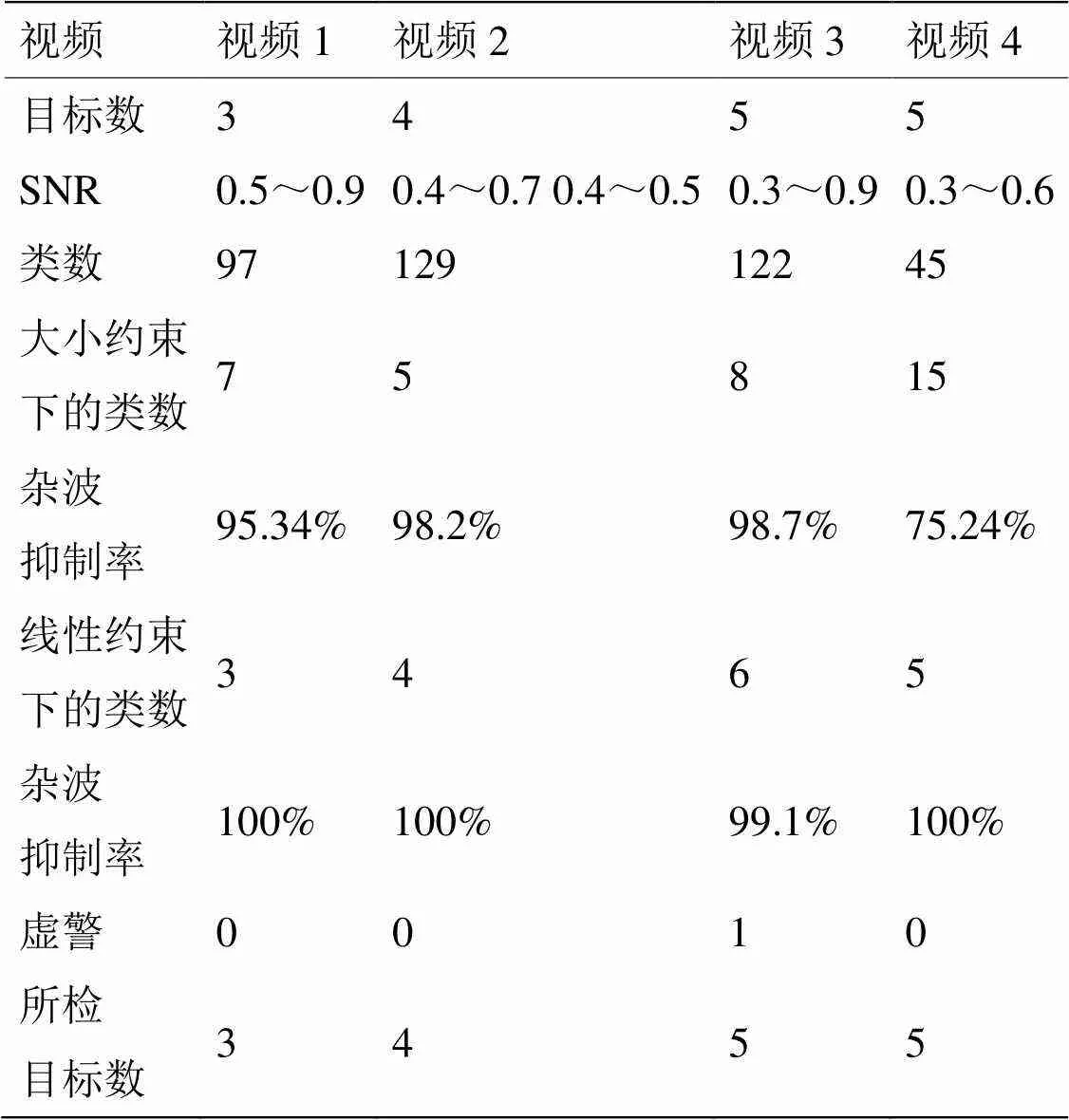
表1 本文算法检测性能
相比于Max-median[20]、Top-Hat[21]、Sparse[16]和IPI[9]检测算法,本文提出的检测算法在检测弱小目标方面有着较好的检测性能。Top-Hat检测算法在检测对比度强的目标方面具有明显的优势,但该算法也会对图像中的鱼鳞波,边缘等信息显著性加强,提高识别的难度,如图2(b)所示。Max-median算法采用非线性平滑技术,将每一像素点灰度值调整为邻域窗口中沿多方向的中值中的最大值。因此,该类算法可以很好地抑制噪声点,增强目标的对比度,但该类算法不能检测大小为2×1,3×2等最小的可跟踪目标,图2(c)及表1的实验对比效果也显示该算法存在漏检。Sparse算法则是利用将红外图像分块进行重构,利用红外弱小目标在字典下稀疏性对目标进行检测,实验结果表明该算法具有非常鲁棒的实验效果,因为样本块的大小设置为7×7,非常适合高亮小目标的特征表;同时,低对比度目标也会因信号太弱,而在优化过程中误认为是噪声而漏检。IPI算法则是在稀疏的基础上引入低秩正则[22],该算法不仅可以检测出微弱信号,还能抑制噪声,仿真结果如图2(f)所示。实验结果表明,该类算法是现有检测类算法中指标最好的算法,但该类算法的复杂度较高,不太适合工程应用。本文提出的算法如图2(f)所示,可以看出该类算法能在特征点的累计图上实现聚类,进而找到疑似目标,然后在大小与线性的约束下实现对小目标的鉴别。
3 结论
本文在自动聚类框架基础上提出了一个新颖的算法来检测复杂海杂波背景下的弱小目标。本文不再采用传统的数据关联策略检测疑似目标,而是把目标检测直接转换成从累积图像中提取其轨迹。不需要任何动态信息和初始跟踪点等先验信息,该方法非常简单和快速。此外,为了实现完整的自动目标跟踪,本文算法提出增加了一个新颖的参数将原始的快速聚类算法改进为自动聚类。不依赖于弱小目标的灰度或对比度,本文的方法在处理具有较低信噪比/杂波比的视频中的弱小目标时也能或得较好的检测性能。同时该方法的实时性强,可在多项式时间复杂度下得到最优检测目标,适合工程应用。
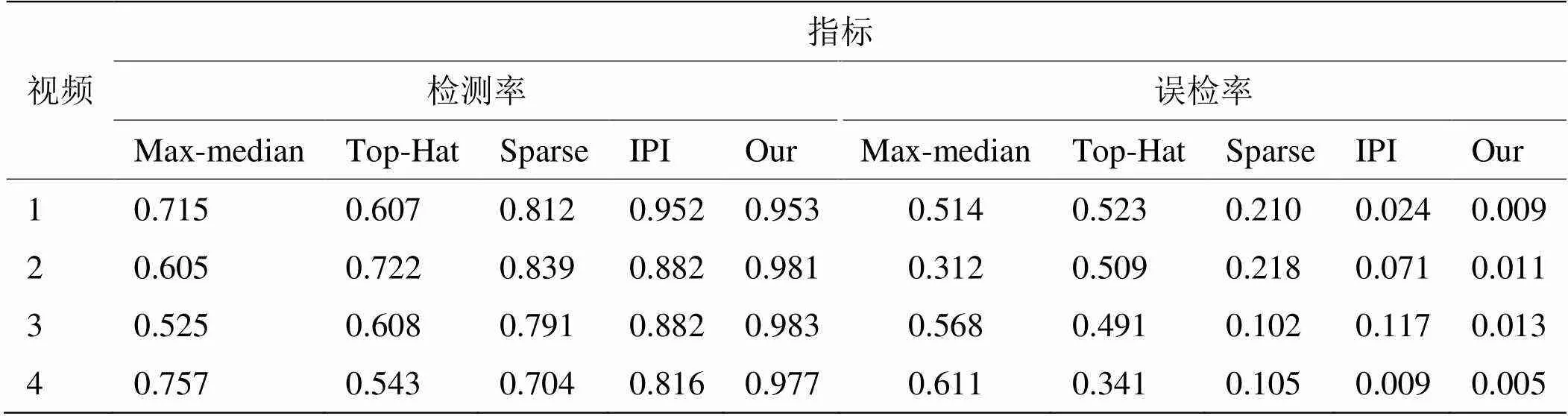
表2 检测指标对比
[1] 刘运龙, 薛雨丽, 袁素真, 等. 基于局部均值的红外小目标检测算法[J]. 红外与激光工程, 2013, 42(3): 814-822
LIU Yunlong, XUE Yuli, YUAN Suzhen, et al. A infrared small object detection algorithm based on local average[J]., 2013, 42 (3): 814-822.
[2] V. tom, T. Peili, M. Leung, et al. Morphology-based algorithm for point target detection in infrared backgrounds[C]//, 1993, 1954: 25-32.
[3] 过润秋, 张颖, 林晓春, 等. 基于形态滤波的红外小目标检测方法[J]. 激光与红外, 2015, 35(2): 451-453.
GUO Ruiqiu, ZHANG Ying, LIN Xiaochun, et al. A small object detection method based on morphological filtering[J]., 2015, 35 (2): 451-453.
[4] J. N. Chiang, Y. H. Zhang, T. T. Lu, et al. Composite wavelet filter for enhanced automated target recognition[C]//, 2012, 8398: 83980E-83980E-10.
[5] 孙翠娟, 杨卫平, 沈振康, 等. 一种基于匹配滤波的红外小目标检测系统[J]. 激光与红外, 2006, 36(2): 147-150.
SUN Cuijuan, YANG Weiping, SHEN Zhenkang, et al. A small object detection system based on matched filter[J]., 2006, 36 (2): 147-150.
[6] S. D. Blostein, T. S. Huang. Detection small moving objects in image sequences using sequential hypothesis testing[J]., 1991, 39(7): 1611-1629.
[7] 卢晓鹏. 视频序列中目标跟踪技术研究[D]. 中国科学院研究生院(电子学研究所), 2007.
LU Xiaopeng. Study on Object Tracking in Video Sequences[D]. Graduate School of the Chinese Academy of Sciences , 2007.
[8] 程建, 周越, 蔡念, 等. 基于粒子滤波的红外目标跟踪[J]. 红外与毫米波学报, 2016, 24(2): 22-28.
CHENG Jian, ZHOU Yue, CAI Nian, et al. Infrared object tracking based on particle filter[J]., 2016, 24 (2): 22-28.
[9] GAO C, MENG D, YANG Y. Infrared patch-image model for small target detection in a single image[J]., 2013, 22(12): 4996-5000.
[10] LI H, WEI Y, LI L, et al. Similarity learning for object recognition based on derived kernel[J]., 2012, 83: 110-120.
[11] ZHAO J, FENG H, XU Z, et al. Real-time automatic small target detection using saliency extraction and morphology theory[J]., 2013, 47: 268-277.
[12] C. L. Philip Chen, H. Li, Y. Wei. A local contrast method for small infrared target detection[J]., 2014, 52(1): 574-581.
[13] 范一飞, 罗丰, 李明, 等. 海杂波AR谱多重分形特性及微弱目标检测方法[J]. 电子与信息学报, 2016, 38(2): 455-463.
FAN Yifei, LUO Feng, LI Ming, et al. Multi-fractal characteristics of sea clutter AR spectrum and detection method of weak target[J]., 2016, 38 (2): 455-463.
[14] 陈小龙, 刘宁波, 宋杰, 等. 海杂波FRFT域分形特征判别及动目标检测方法[J]. 电子与信息学报, 2011, 33(4): 823-830.
CHEN Xiaoong, LIU Ningbo, SONG Jie, et al. Fractal characteristics and dynamic object detection in FRFT domain for sea clutter[J]., 2011, 33(4): 823-830.
[15] 奚刚, 肖春生. 基于时频分布的海杂波环境下目标检测[J]. 船舶电子工程, 2012, 32(8): 77-79.
XI Gang, XIAO Chunsheng. Object detection in sea clutter environment based on time-frequency distribution[J]., 2012, 32(8): 77-79.
[16] Z. Li, Q. Hou, H. Fu, et al. Infrared small moving target detection algorithm based on joint spatio-temporal sparse recovery[J]., 2015, 69: 44-52.
[17] ZHANG C, LIU H, LIAO S, et al. Small target detection in infrared video sequence using robust dictionary learning[J]., 2015, 68: 1-9.
[18] 高山, 毕笃彦, 魏娜. 基于UPF的小目标检测前跟踪算法[J]. 计算机应用, 2009, 29(8): 2060-2064.
GAO Shan, BI Duyan, WEI Na. Analysis of small object detection algorithm based on UPF [J]., 2009, 29 (8): 2060-2064.
[19] A. Rodriguez, A. Laio. Clustering by fast search and find of density peaks[J]., 2014, 344: 1492-1496.
[20] Venkateswarlu R. Max-mean and max-median filters for detection of small targets[C]//, 1999, 3809: 74-83.
[21] 叶斌, 彭嘉雄. 基于软形态学的top-hat算子改进算法[J]. 中国图象图形学报, 2002, 7(7): 638-642.
YE Bin, PENG Jiaxiong. Improved top-hat operator based on soft morphology[J] ., 2002, 7 (7): 638-642.
[22] TANG Z, WANG S, HUO J, et al. Bayesian Framework with Non-local and Low-rank Constraint for Image Reconstruction[C]//, 2017: 012008.
A Novel Infrared Small-dim Object Detection under Complex Sea-clutter Background
YUAN Yaodong1,XU Hongyan1,TAO Lin2,3
(1.,,450008,; 2.,,473000,; 3.,,450002,)
Infrared small-dim object detection under a complex background is one of the key technologies in the photoelectric fire-control system and infrared seeker. As for the problem of low-SNR target detection in a complex sea-clutter background, combining the SURF feature descriptor, a small-dim object detection algorithm based on automatic clustering segmentation is proposed. Firstly, the SURF algorithm is used to calculate the points of interest in the infrared image, and these points are projected ontoa frame to form a cumulative image. The object points are aggregated in the cumulative imagedue to the motion continuity of the object in the infrared frames. Then the improved fast-clustering algorithm is adopted to detect the suspect target adaptively. Finally, according to the prior information onthe size constraint and linear constraint of the object cluster, the small-dim object is distinguished from the sea-clutter. A large number of simulation experiments and fly-by-flight verification show that compared with other existing algorithms, theproposed algorithm can obtain better detection performance when dealing with small-dim objects with low SNR, and it can detect the optimal detection target in the polynomial time complexity, which is suitable for engineering applications.
infrared small-dim object,sea-clutter,SURF feature description,cumulative image,clustering algorithm,object detection
TP391.41
A
1001-8891(2017)11-1054-06
2017-04-04;
2017-05-12.
袁耀东(1984-),男,硕士,讲师,主要从事光机结构设计,图像处理,计算机网络与云计算方向的研究,医学影像处理。
国家自然科学基金项目(61379079);河南省国际科技合作基金项目(144300510007);河南省高等学校重点科研项目计划(15B520008)。
