空间目标红外特征提取与识别技术
2017-03-26李瑞东孙协昌
李瑞东,孙协昌,李 勐
空间目标红外特征提取与识别技术
李瑞东,孙协昌,李 勐
(北京卫星信息工程研究所,北京 100086)
针对空间目标红外识别中典型的类内变化大、类间变化小等问题,提出了一种用支持向量机(Support Vector Machine,SVM)分类器结合局部二值模式(Local Binary Pattern,LBP)直方图特征和灰度直方图特征的空间目标红外特征提取与识别方法。以国内某卫星和国外某卫星为研究对象,提取它们红外图像的LBP直方图特征以及灰度直方图特征;使用红外仿真软件生成两个目标在不同姿态、不同分辨率下的样本图,并分成两部分,分别作为SVM分类器的训练集和测试集。实验结果表明,LBP直方图特征和灰度直方图特征均能够以较高的准确率对空间目标进行识别,且其识别效能与目标红外图像的分辨率以及SVM核函数有关。
红外识别;特征提取;空间目标
0 引言
自从1957年发射第一颗人造地球卫星以来,人类在航天领域的活动也逐渐频繁起来,随之而来的则是不断增加的在轨航天器以及空间碎片,造成空间环境日益恶化。恶劣的空间环境不仅对在轨航天器构成直接威胁[1],甚至对地面上人类的活动也形成了潜在的威胁。据不完全统计,目前在环绕地球的轨道上总共有超过6000吨的人造空间物体,其中能够工作的航天器仅占7%,其余的均为空间碎片,且碎片的数量仍然逐年增加。
为了保障卫星等航天器的安全,急需开展空间目标监视识别技术研究。当前已有许多国家取得较好的成效,美国、俄罗斯、英国、法国、德国和日本等国家都已经具有探测空间目标的能力,特别是美国己经建立了较完善的空间目标监视识别系统。
红外探测经过几十年的发展,已经成为一种非常重要的光学探测手段。热辐射是红外辐射的来源主要,其本质是物体内部分子和原子的运动所产生的,而且温度越高,这种微观运动越剧烈,所产生的红外辐射也越强,因此红外探测对于目标与背景之间的温差具有较高的敏感性[2];其次,物体的红外辐射能量不完全来自于环境的入射能量,其散发出的能量也不局限于反射能量,因此无论在白天还是夜间都可以进行目标红外探测[3],可全天时工作;与有源的电磁探测手段相比[4],红外探测手段本身还具有隐蔽性的特点。因此,从目标的红外特征入手,研究空间目标红外特征提取识别技术,对空间目标监视识别系统的构建具有重要意义。
1 空间目标红外特征提取
目标特征提取是目标识别的前提和保障,其基本任务是从大量的观测数据中提取最有效的特征,为空间目标识别、特性编目、参考图制备和交会分析提供信息基础。
1.1 用于目标检测的描述子估计
目前计算机视觉领域发展了一些用于目标检测的、性能优良的特征描述子,比如Haar特征、LBP特征、SIFT描述子等。
1)Haar特征
Haar特征是一种简单而有效的特征,相对比较简单,计算速度较快,对于有固定结构的目标检测有非常好的效果。Haar特征模板由白色和黑色两种矩形组成,其特征值为白色矩形在图像子窗口对应区域的灰度值之和减去黑色矩形在图像子窗口对应区域的灰度值之和,反映了图像局部的灰度变化情况。图像的结构位置以及轮廓线或关键点都可以通过这种对简单矩形特征的计算进行提取。
常用的Haar特征包括4类特征,分别为边缘特征、线型特征、中心特征和对角特征。由于矩形模板可以在图像中任意位置、任意尺度计算,因此可以认为Haar特征主要由3个因素决定,分别是矩形模板类别、起始位置和矩形大小。也正是由于Haar特征这种非常灵活的特性,因而可以在图像中提取大量的Haar特征。此外,还可以通过积分图实现Haar特征的快速计算。
2)LBP算子


LBP特征不仅能描述一些局部微小特征,包括亮点、暗点、稳定区域及纹理细节等,而且能反映出这些特征的分布情况。另外,LBP具有任意单调变换不变性和图像旋转不变性。
3)SIFT特征
SIFT算法由D.G.Lowe 1999年提出[7],并在2004年完善总结。SIFT算法是一种基于计算机视觉的算法,主要用来对影像中的局部性特征进行侦测与描述,并在空间尺度中寻找极值点,同时将其位置、尺度和旋转不变量提取出来。
SIFT算法[8]信息量丰富,适用于对大量特征进行快速、准确的匹配;在目标物体很少的条件下,该算法也能够产生大量的SIFT特征向量;不仅如此,SIFT算法经过优化之后可能达到实时运算的效果,且能够与多种其它形式的特征向量联合使用,其拓展性也十分良好。
从理论上说,SIFT特征是一种相似不变量,即对图像尺度变化和旋转是不变量。SIFT特征对图像的视点变化、仿射变换、噪声和光照变化具有了较强的适应性,定位精度比较高。
1.2 特征选择和提取
针对空间目标红外特征提取识别问题,以国内某卫星(以下简称国内卫星)和国外某卫星(以下简称国外卫星)为研究对象,并对其进行特征提取和识别。初始考虑如下3种特征提取方案:
1)提取红外图像的Harris角点,对每个角点生成描述符,然后利用词袋(BOW)模型进行编码形成每幅图像的描述子;
2)提取红外图像的LBP直方图特征;
3)提取红外图像的灰度直方图特征。
经过实验采用后两种特征。对于方案1),实验发现在图像分辨率较高的情况下,确实能够提取到很多角点,但是当图像分辨率降低到[20 20]以下之后,角点检测算法基本失效,在图像上检测到的角点个数非常少、甚至检测不到,因此后续无法利用BOW模型对图像进行编码,图1给出了一组角点检测失败的例子。
对于方案2),鉴于最小的图像分辨率为[10 10],在提取LBP直方图特征时设定cell大小为[5 5],并最终对整幅图像所有cell上的LBP直方图取平均值,然后做L1归一化,作为该图像的LBP直方图特征。图2和图3给出了国内卫星和国外卫星部分图像及其LBP直方图特征。从图中可以看出,卫星在不同的姿态下其LBP直方图特征也不相同;而且LBP特征直方图的bin数量较多,图像局部特征差异提取较为充分,更有利于微小差异的检测。
对于方案3),直接提取灰度直方图特征,直方图的bin数设为16,然后做L1归一化。图4和图5给出了国内卫星和国外卫星部分红外图像及其灰度直方图特征。相比于LBP直方图特征,灰度直方图bin的数量大大减少,但是直方图特征之间的差异也更为明显,对于目标整体之间的差异检测非常有效。

图1 在分辨率为[50 50]下角点检测失败的图像对

图2 国外卫星红外图像及其LBP直方图特征
Fig.2 Infrared images and LBP histogram characteristics of the foreign satellite

图3 国内卫星红外图像及其LBP直方图特征

图4 国外卫星红外图像及其灰度直方图特征

图5 国内卫星红外图像及其灰度直方图特征
2 空间目标红外识别
目标识别的基本原理[9]是利用检测手段获取被识别对象的各种特征参数,并在此基础上建立参考样本,然后将被识别对象与参考样本进行比较辨认。因此,参考样本的准确性和唯一性对于目标的准确识别具有重大影响。
对于空间目标红外识别而言,难点主要在于观测获取的目标图像无约束姿态变化和分辨率低。同一目标在不同姿态下得到的观测图像往往差异很大,而不同卫星在某些姿态下的观测图像又很相似,即目标红外识别是典型的类内变化大,类间变化小的目标识别问题。
2.1 样本生成
利用红外仿真软件分别生成国内卫星和国外卫星在不同姿态、不同分辨率下的图像作为训练样本和测试样本。针对每个目标,分别生成[10 10], [20 20], [30 30], …, [100 100]等10种分辨率下的全姿态空间样本图像,在特定的分辨率下,分别在,,三个轴上每隔45°采样一个样本,总共生成8×8×8=512幅图像,并针对每种分辨率按照统一的方法分别训练分类器,从而给出分辨率对识别结果的影响。图6为两个目标在不同像素大小下的样本示例。

图6 不同分辨率下国外卫星和国内卫星样本示例图
2.2 分类器训练
目前常用的分类器有欧氏距离最近邻法和最近中心邻法,方法简单直观且计算量小,但是对于复杂目标的分类能力有限[10];神经网络分类器具有自适应性、自组织和自学习等优点,但是其收敛速度慢,且对样本依赖性较强;而SVM分类器在解决小样本和高维模式识别问题上表现优异[11],且分类速度较快。对于空间目标这种难以长时间持续跟踪获得大量样本的识别问题而言,SVM分类器将具有更好的适应性。
SVM分类器通过训练学习得到样例的输入输出对应关系[12],然后根据新输入样本预测输出结果。其基本思想可以概括为[13]通过内积函数定义的非线性变化将输入空间变换到一个高维空间,然后在这个新空间中求解最优分类面。
1)SVM基本原理
SVM是一个两类分类器,对于给定标记好的训练样本,SVM输出一个最优化的分隔超平面,最优化度量可以定义为超平面距离所有训练样本的最小距离,或称为间隔(margin),最优分割超平面能够最大化训练数据的间隔。
下式定义经典超平面表达式:
|+T|=1 (2)
式中:称为权重向量;称为偏置;式中表示离超平面最近的点。点到超平面(,)的距离为:

对于经典超平面,表达式中的分子为1,因此支持向量到经典超平面的距离为:

间隔(margin)表示为,取值是最近距离的两倍:

最大化转化为附加限制条件下最小化函数,限制条件为超平面将所有训练样本x正确分类:

即

式中:y表示样本的类别标记。上式可以通过拉格朗日乘数法得到最优超平面的权重向量和偏置。
2)软间隔SVM分类器
上述SVM学习方法是针对线性可分问题的,并不适用于线性不可分训练数据,因为此时上述不等式约束并不能都成立。因此,需要修改间隔最大化,使其成为软间隔最大化。假设给定一个特征空间上的训练数据集:
={(1,1), (2,2), …, (x,y)} (8)
式中:x为第个特征向量,y为x的类标记。由于训练数据集是线性不可分的,说明训练数据中存在一些特异点,将这些特异点除去后,其余样本组成的集合将仍然是线性可分的。为此可以对每个样本点(x,y)引进一个松弛变量≥0,使函数间隔加上松弛变量大于等于1。约束条件变为:



即
y(Tx+)≥1-,≥0,=1, 2, …,(12)
3)核函数与SVM分类器
针对线性问题,线性SVM是有效办法;而针对非线性问题,则需要将原空间的数据映射到新空间,在新空间里使用线性分类学习方法。此时,涉及度量样本间相似性的径向基函数(RBF):

式中:、为两个样本;为经验系数。
2.3 识别过程与结果
识别过程如下:
1)在每种分辨率条件下,国内卫星和国外卫星的红外图像被随机划分为两份,其中512幅图像(国内卫星和国外卫星各256幅)作为训练样本,剩余512幅作为测试样本。
2)对训练样本分别进行LBP直方图特征和灰度直方图特征的提取。
3)利用提取的两类特征对线性核SVM分类器和RBF核SVM分类器进行训练,分别确定其最优超平面的权重向量和偏置。
4)将训练好的两种SVM分类器对测试样本进行分类识别,并统计两种SVM分类器分别用LBP直方图特征和灰度直方图特征进行目标识别的准确率、目标样本的召回率以及虚警率。
假设测试样本中共有个国外卫星样本,个国内卫星样本,经过分类之后,共有P个国外卫星样本被正确识别,N的国外卫星样本被错误识别,有:
=P+N(14)
共有N个国内卫星样本被正确识别,P个国内卫星样本被错误识别,有:
=N+P(15)
识别准确率定义为:
Acc=(P+N)/(+) (16)
召回率定义为:
Rec=P/(P+N) (17)
虚警率定义为:
FalA=P/(P+P) (18)
5)将上述过程通过随机划分样本的方式对每种分辨率下的红外图像进行100次实验,统计不同核函数的SVM分类器和不同特征的识别结果。
图7为使用线性核SVM和LBP直方图特征,针对不同分辨率图像,在训练集和测试集上的识别准确率、召回率和虚警率曲线,表1给出相应的性能指标数据。

图7 线性核SVM+LBP直方图特征的识别结果曲线

表1 线性核SVM+LBP直方图特征的识别结果
图8为使用RBF核SVM和LBP直方图特征,针对不同分辨率图像,在训练集和测试集上的识别准确率、召回率和虚警率曲线,表2给出相应的性能指标数据。

图8 RBF核SVM+LBP直方图特征的识别结果曲线

表2 RBF核SVM+LBP直方图特征的识别结果
图9为使用线性核SVM和灰度直方图特征,针对不同分辨率图像,在训练集和测试集上的识别准确率、召回率和虚警率曲线,表3给出相应的性能指标数据。
图10为使用RBF核SVM和灰度直方图特征,针对不同分辨率图像,在训练集和测试集上的识别准确率、召回率和虚警率曲线,表4给出相应的性能指标数据。

图9 线性核SVM+灰度直方图特征的识别结果曲线
识别过程中,不同方案的时间复杂度其区别主要体现在两个方面,一是提取特征的复杂度,二是SVM分类器核函数的复杂度。本次实验选取了目标红外图像的LBP直方图特征和灰度直方图特征,由于LBP直方图特征需要先提取目标的LBP特征,然后提取其直方图特征,对于×大小的图像,其时间复杂度为(92),而灰度直方图特征的时间复杂度为(2),因此相比于灰度直方图特征,LBP直方图特征的时间复杂度更高;其次,在核函数的选择上,由于RBF核函数涉及到非线性运算,因此其时间复杂度也要高于线性核函数。

表3 线性核SVM+灰度直方图特征的识别结果
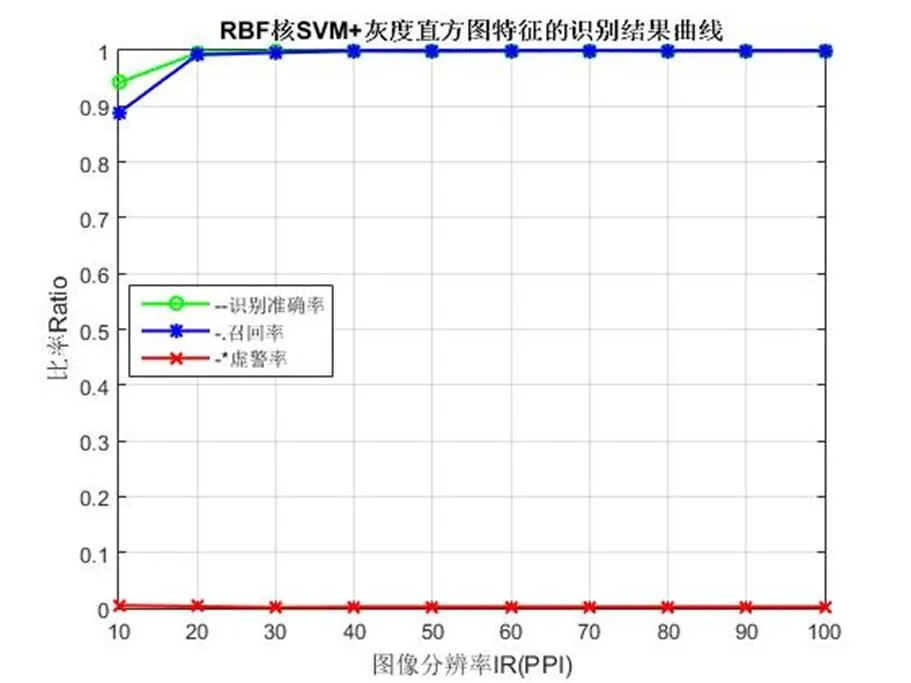
图10 RBF核SVM+灰度直方图特征的识别结果曲线

表4 RBF核SVM+灰度直方图特征的识别结果
3 结论
通过上述实验结果可知:
1)LBP直方图特征和灰度直方图特征均具有目标识别的能力。从图7和图9中可以看出,在使用线性核SVM分类器的条件下,LBP直方图特征在红外图像分辨率达到[10 10]的时候,识别率已经大于85%;灰度直方图特征在分辨率为[30 30]的时候也已经大于85%的识别率;而从图8和图10中可以看出,在使用RBF核SVM分类器的条件下,在红外图像分辨率为[10 10]的时候,LBP直方图特征和灰度直方图特征均达到90%以上;
2)无论是LBP直方图特征还是灰度直方图特征,使用RBF核SVM分类器的识别效能要优于线性核SVM分类器。空间目标识别并非线性可分问题,通过RBF核函数将非线性问题映射到线性空间,再进行分类识别,结果大大提高了识别概率,也说明了SVM分类器处理线性不可分问题时的良好性能,当然其时间复杂度也更高;此外,随着红外图像分辨率的增加,识别率整体呈上升趋势。这是由于随着分辨率的增加,红外图像包含的信息越多,与直观预期相符合;
3)在使用线性核SVM分类器的时候,分辨率较低时,LBP直方图特征的识别率要优于灰度直方图特征;而分辨率较高的时候,灰度直方图特征优于LBP直方图特征。
[1] 王艺. 基于激光技术空间碎片的主动移除[D]. 南昌: 南昌航空大学, 2015.
WANG Yi. Active Space Debris Removal Based on Laser Technology [D]. Nanchang: Nanchang Hangkong University, 2015.
[2] 苏刚. 云背景空中目标红外仿真研究[D]. 武汉: 华中科技大学, 2014.
SU Gang. The Study on the Infrared Simulation of Aerial Target under Cloud Background [D]. Wuhan: Huazhong University of Science and Technology, 2014.
[3] 季圆圆. 典型地物红外特征仿真关键技术研究[D]. 大连: 大连海事大学, 2014.
JI YuanYuan. Study on Key Techniques of Simulation for Infrared Characteristics of Typical Ground Objects [D]. Dalian: Dalian Maritime University, 2014.
[4] 马伟. 卫星热辐射特性及其空间辐照环境效应研究[D]. 南京: 南京理工大学, 2011.
MA Wei. Research on Thermal Radiation Characteristics and Effects of Space Exposure [D]. Nanjing: Nanjing University of Science and Technology, 2011.
[5] 曹凯. 基于特征描述子的人脸识别方法研究[D]. 西安: 西安电子科技大学, 2014.
CAO Kai. A Study of Feature Descriptors For Face Recognition [D]. Xian: Xidian University, 2014.
[6] Y. Rodriguez, S. Marcel. Face Authentication Using Adapted Local Binary Pattern Histograms[C]//,, 2006, 3954(4): 321-332.
[7] D. G. Lowe. Distinctive image features from scale invariant key points[J]., 2004, 60(2): 91-110.
[8] 刘朵. 基于特征描述子的目标跟踪研究[D]. 西安: 西安电子科技大学, 2013.
LIU Duo. Research on Feature Descriptor-based Object Tracking [D]. Xi’an: Xidian University, 2013.
[9] 王彦. 基于图像的空间目标识别关键技术研究[D]. 西安: 西安电子科技大学, 2010.
WANG Yan. Key Technology of Space Object Identification Based on Image[D]. Xi’an: Xidian University, 2010.
[10] 谭敏洁. 基于压缩感知的雷达一维距离像目标识别[D]. 成都: 电子科技大学, 2015.
TAN MinJie. High Range Resolution Profile Target Recognition Based on Compressed Sensing[D]. Chengdu: University of Electronic Science and Technology of China, 2015.
[11] 李瑞帅. 基于Adaboost和SVM的快速行人检测方法研究[D]. 桂林: 桂林电子科技大学, 2014.
LI RuiShuai. Research on Fast Pedestrian Detection Method Based on Adaboost and SVM[D]. Guilin: Guilin University of Electronic Technology, 2014.
[12] 寿娜. 基于图像的行人检测系统研究[D]. 浙江: 浙江工业大学, 2013.
SHOU Na. The Research of Pedestrian Detection System For Images [D]. Zhejiang: Zhejiang University of Technology, 2013.
[13] 张迪飞, 张金锁, 姚克明,等. 基于SVM分类的红外舰船目标识别[J].红外与激光工程, 2016, 45(1): 167-172.
ZHANG DiFei, ZHANG JinSuo, YAO KeMing, et al. Infrared Ship-Target Recognition Based on SVM Classification[J]., 2016, 45(1): 167-172.
Infrared Feature Extraction and Recognition Technology of Space Target
LI Ruidong,SUN Xiechang,LI Meng
(,100086,)
Dissimilarity is usually large among the same space target but small among different ones for infrared recognition. Aiming at these problems, a method of space-target infrared feature extraction and recognition with the use of SVM classifier combining with LBP histogram feature and gray histogram feature is proposed. A domestic satellite and a foreign satellite are taken as the objects of study. LBP histogram feature and gray histogram feature of their infrared images are extracted. Sample images under different attitudes and resolutions are generated by the simulation software, and they are divided into two parts, one for SVM classifier training set and the other for test set. The test results indicate that not only can both LBP histogram feature and gray histogram feature recognize the space targets with a high accuracy, but also their recognition performances relate to the resolution of infrared images and the kernel functions of SVM.
infrared recognition,feature extraction,space target
TN219
A
1001-8891(2017)05-0427-09
2017-01-04;
2017-04-18。
李瑞东(1992-),男,湖北武穴人,硕士研究生,主要从事空间遥感信息处理方向的工作。
国家863计划课题(2014AA7032031E);火箭军装备预研项目。
