优化的BP神经网络在水轮机调节系统中的应用研究
2017-03-21许永强杨沛源杨超杰刘万康
谭 联,许永强,杨沛源,杨超杰,刘万康
(华北水利水电大学电力学院,郑州 450000)
0 引 言
自PID控制器被提出以来,由于其结构简单、易于操作、参数易于调整和控制精度可靠等优点,使得工程中各种先进控制过程或优化均是以PID控制回路为基础。然而实际生产过程中被控对象多为结构复杂、参数时变的非线性动态系统,譬如,在水力发电行业中,水轮机调节系统就是一典型的具有变参数、非线性等特性的非最小相位系统,目前该调速器所采用的控制规律仍然是PID控制规律,但在实际生产运行中常规PID控制往往出现参数不易实时调整、自适应能力差、控制效果不佳等问题。
伴随着水电在电力系统中比重的不断增加,电网对水轮机调节系统的控制品质的要求也越来越高。所以,寻求更好的控制策略应用于该系统以获得更好的动态过渡过程,获得更安全、更优质的电能即是本文的研究重点。目前,水轮机组控制策略多侧重于智能化控制方式的研究,但这些智能方式仍然存在着各种各样的问题:模糊PID控制效果相较于常规PID控制虽有了明显改善,但在较小偏差范围内控制品质仍不能令人满意[1];BP神经网络PID控制除具有常规PID控制的基本特点,又拥有神经网络自身固有的自适应、自学习的特性及任意非线性逼近的能力,使其能够很好地实现在线参数调整,但由于BP神经网络自身的缺陷,使其还存在着诸如收敛速度慢、易陷入局部极小等问题[2]。
主成份分析是研究在原始样本数据(多变量)中如何通过少数几个主成份来揭示原变量间的内部结构的方法,它的应用可以使神经网络的输入单元减少,进而使得网络结构得到简化,以此达到缩短网络收敛时间、提高网络的精度和稳定性的目的。
本文主要研究采用主成份分析对BP神经网络进行优化[3,4],设计新的水轮机调节PID控制系统,并在MATLAB中完成M语言的编写,进行实例仿真、分析。
1 基于主成份-BP神经网络的水轮发电机组调节系统
1.1 主成份分析
1.1.1 主成份分析概念
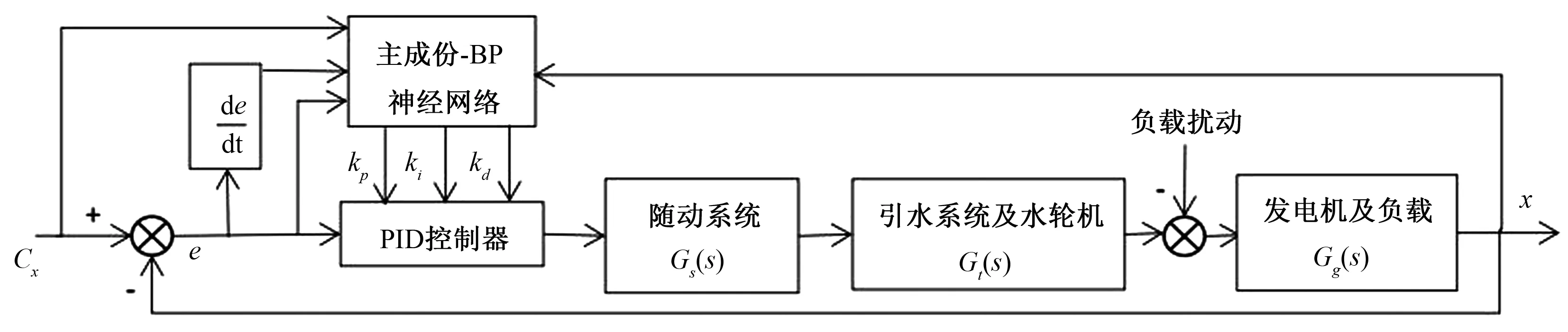
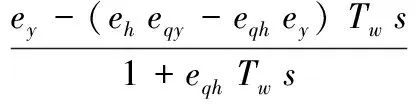
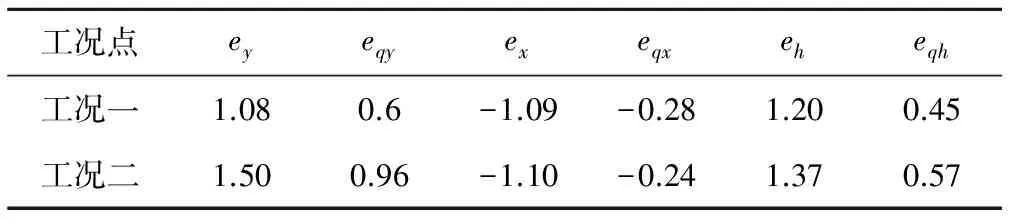
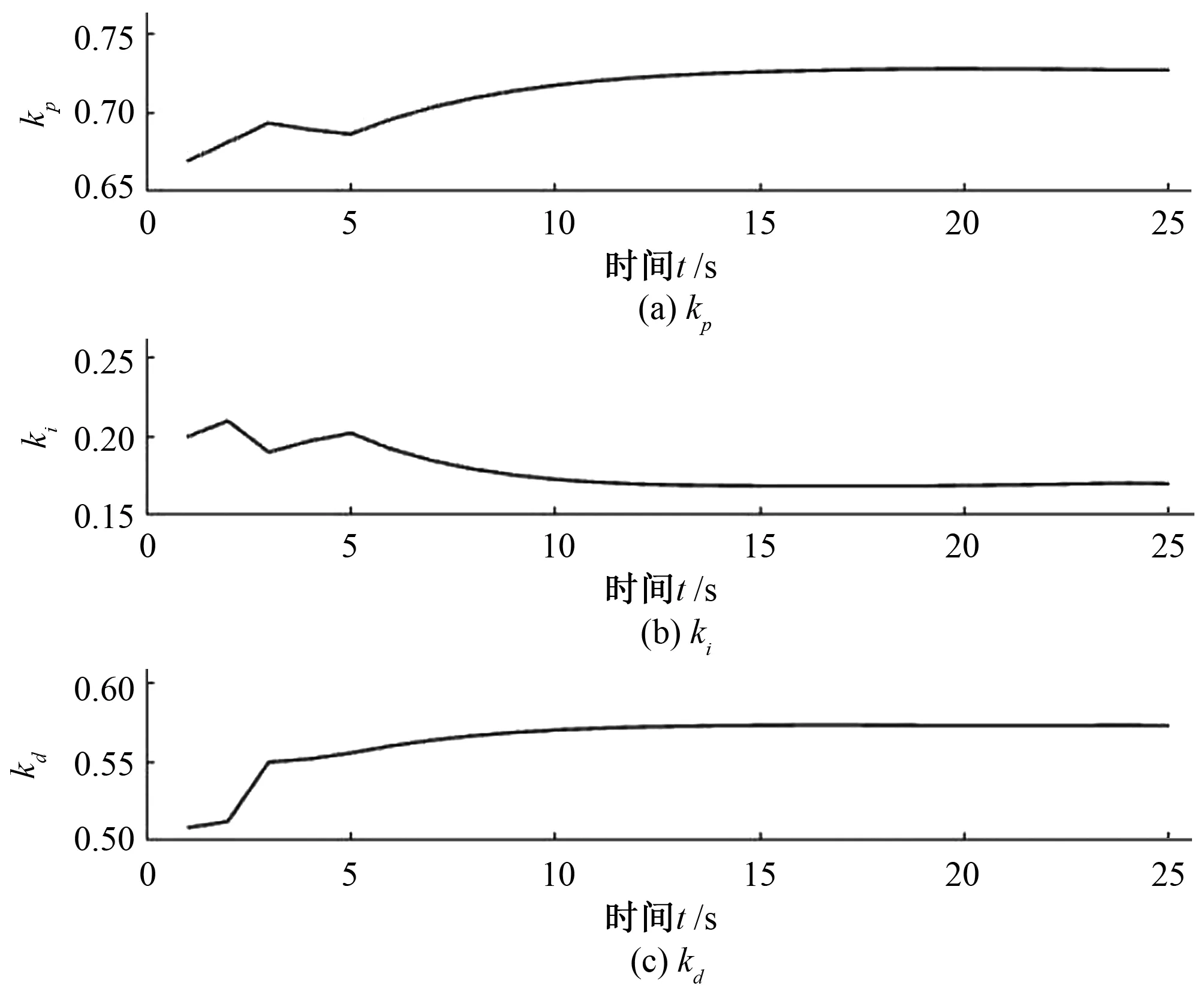
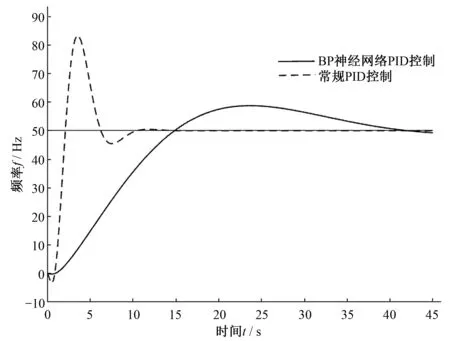
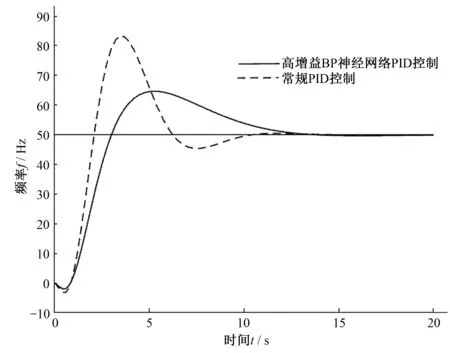
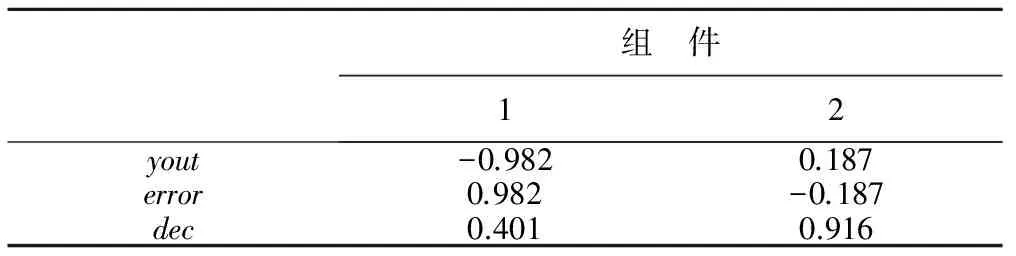
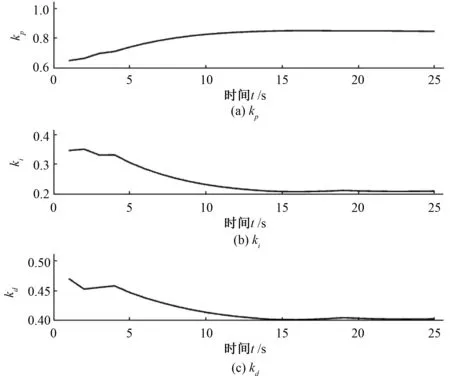
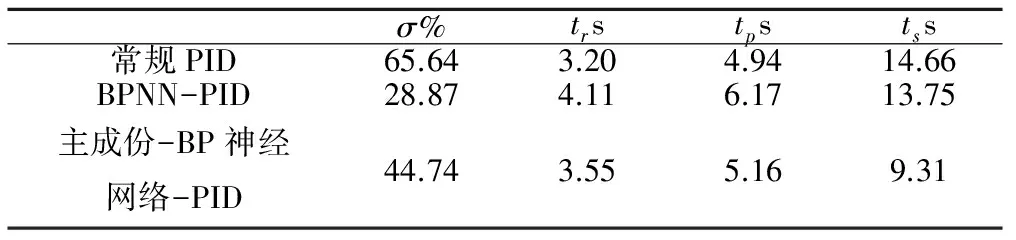
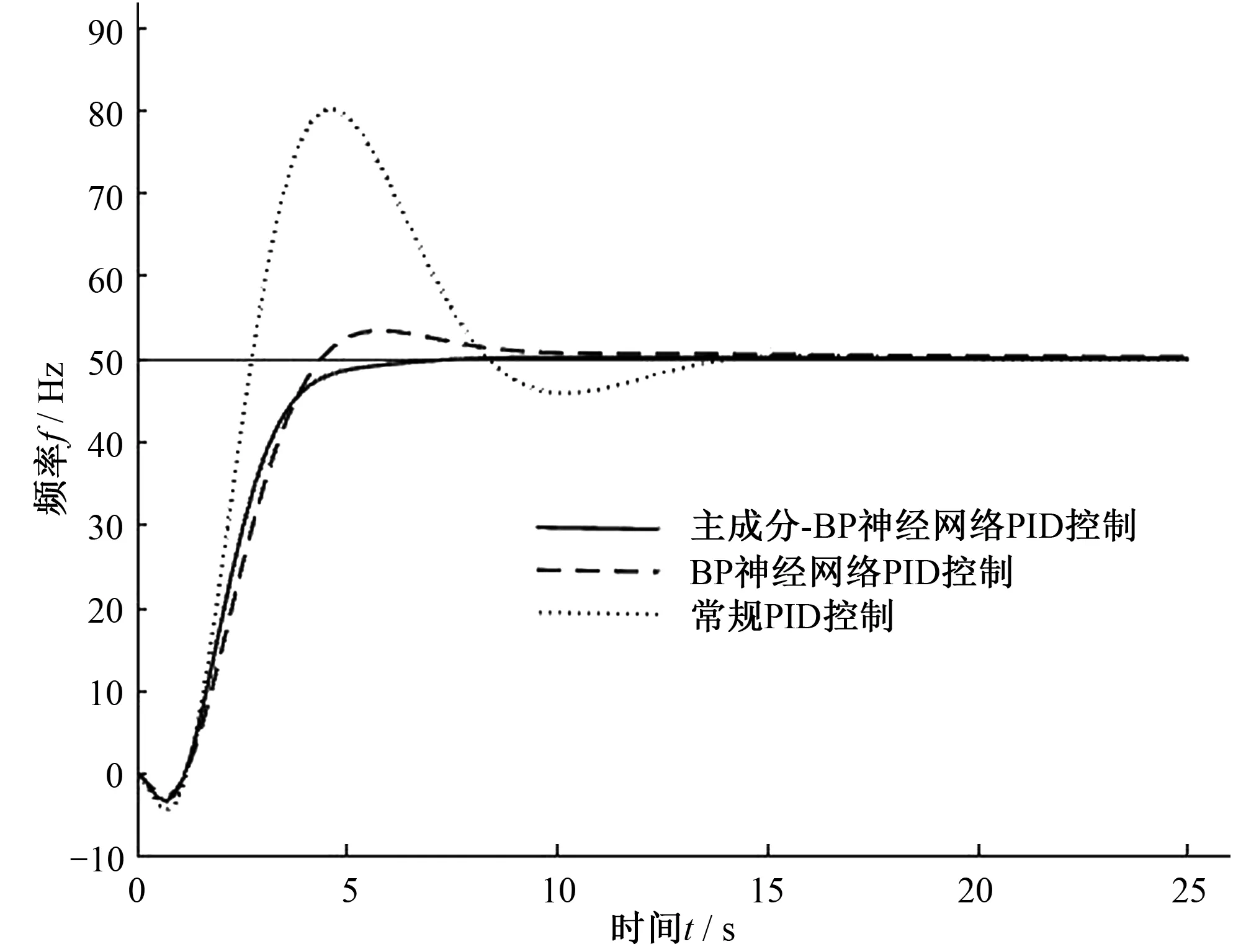
主成份分析是多元统计分析中对样本数据进行降维的最为常用的一种方法。其主要任务是利用数学算法将原来样本数据库中具有一定相关性的指标变量X1,X2,…,Xp(假如为p个变量),去除变量间多重共线性(相关性)重新组合成一组较少个数的综合指标F1、F2、…、Fm(m 1.1.2 主成份分析计算步骤 假设原始数据有n个样本,每个样本有p个变量,构成一个n×p阶的矩阵。 (1) 计算样本相关系数矩阵。 (2) 矩阵中相关系数为: (3) 求出矩阵R的特征值λi和相应的正交化单位向量ai,前m个特征值λ就是前m个主成份对应的方差,ai便是主成份各个变量前的系数。即: Fi=a′iX (4) 选择主成份:根据方差累积贡献率G(m)的大小来确定最终选取的主成份个数。 (5) 当G(m)≥85%时,就可以认为新样本能够反映原来样本的信息了,相应的取前m个主成分,即:F1、F2、…、Fm。 1.2.1 BP神经网络PID控制结构 BP神经网络PID控制(BPNN-PID)结构包括两个部分[2]: (1)常规PID控制:直接对被控对象进行控制。仿真试验中,其控制规律增量式为: (6) 式中:kp为比例系数;ki为积分时间常数;kd为微分时间常数;u(k)为k采样时刻控制器输出;rin(k)为k采样时刻期望系统输出值;yout(k)为k采样时刻系统实际输出值;e(k)为rin(k)与yout(k)所形成的偏差。 (2)BP神经网络(BPNN):凭借神经网络任意非线性逼近的能力,在误差允许范围内,根据给定期望输出量、实际输出量及二者所形成的偏差,逐层调整网络系数以完成控制系统最优PID参数的整定。网络输出分别为参数kp,ki,kd。 1.2.2 主成份-BP神经网络PID算法 (1)本文中BPNN确定为3层,常规BPNN-PID(网络结构为4-5-3)输入量为: X=[rin(k),yout(k),e(k),dec(k)]T (7) 式中:dec(k)为k采样时刻系统偏差变化率。 在MATLAB中完成该方法程序的编写并进行仿真试验[5,6],整定出该方法下最优的kp,ki,kd参数组合,在学习、自适应过程中得到的矩阵X即为主成份分析的数学样本。 (2)对矩阵X进行主成份分析,选取若干主成份与rin(k)组成新的样本矩阵Xm+1: Xm+1=[rin(k),F1,F2,…,Fm]T (8) 将其作为网络输入量搭建新的BP神经网络并进行仿真试验,整定出该方法下控制系数的最佳组合,算法及步骤与常规BPNN-PID控制相同。 将上节中主成份-BP神经网络-PID控制器应用于某水电厂混流式水轮发电机组,构成的控制系统如图1所示[2,7],图1中各部分传递函数为公式(9)~式(11)所示。 图1 基于主成份-BP神经网络的水轮发电机组调节系统结构图Fig.1 Based on the principal component-BP neural network control system of hydroelectric generating set structure (9) (10) Gg(s)=1/(Tas+en) (11) 式中:Ty为接力器反应时间常数;Tw为水流惯性时间常数;Ta为机组惯性时间常数;ey、eh、eqy、eqh、en均为系统传递系数。 该机组调节系统的初始设计参数为:Ta=8.5 s,Tw=1.774 s,Tb=0.26Ta=2.21 s,en=1.0,Ty=0.3 s,选工况一(额定工况)和工况二(非额定工况)进行仿真计算。两工况的水轮机传递系数如表1所示。 表1 两工况点的水轮机传递系数Tab.1 Two point of the water turbine transfer coefficient 分别采用常规PID、BP神经网络PID及主成份-BP神经网络PID对上述两个工况点的被控系统进行仿真分析、比较,常规PID参数值由Ziegler-Nichols方法整定[1]。 由Ziegler-Nichols整定方法得到该工况点下常规PID参数分别为:kp=11.02,ki=4.61,kd=6.59。 2.1.1 基于BP神经网络的PID控制仿真[5] 设定η=0.2,α=0.01,网络输入为X=[rin(k),yout(k),e(k),dec(k)]T。 首先选取了一组随机数作为权值、阈值: wi=[0.190 4,0.616 4,-0.042 2,0.099 6; 0.247 3,-0.224 1,-0.159 3,0.215 8; 0.607 7,-0.032 7,0.334 2,-0.236 5; -0.715 8,0.084 6,0.016 4,-0.066 8; 0.056 4,-0.097 0,-0.090 4,-0.130 9] wo=[0.227 5,-0.264 3,0.123 2,-0.424 9,-0.038 9; -0.418 4,-0.054 3,-0.404 1,0.392 0,0.125 5; 0.348 2,0.229 7,0.142 7,0.332 5,0.422 9] 仿真结果如图2所示:采用PID控制,取kp=0.717 9,ki=0.179,kd=0.563 2。在simulink仿真给定频率设定为50 Hz,给定频率阶跃跟踪曲线如图3所示。 图2 参数自适应曲线Fig.2 The parameter adaptive curve 图3 频率给定阶跃跟踪曲线Fig.3 The frequency of a given step tracking curve 由图3可以看出,相较于常规PID该控制系统具有严重的迟滞现象。所以采用高增益的PID控制器进行补偿[8],加大比例系数kp=7.179,ki=1.79,kd=5.632进行仿真,能得到如图4所示的跟踪结果。 图4 采用高增益PID控制时的阶跃跟踪曲线Fig.4 Step tracking curve with high gain PID control 由图4可以看出,采用高增益的PID控制器进行补偿时,跟踪效果较前面有了很大改善,调节时间由常规PID控制系统的14.66 s降低到了13.75 s(稳态误差允许范围设定为|ess|≤0.2,下同),超调量也有了很大程度的降低。 2.1.2 主成份-BP神经网络PID控制仿真 将2.1.1节BPNN-PID控制系统中实际输出值yout(k)、误差e(k)及误差变化率dec(k)作为优化BP神经网络的学习样本,进行主成份分析(表2)(统计软件SPSS 22.0中实现,数据略)。 表2 主成份贡献率Tab.2 Principal component contribution rate 注:提取方法为主成份分析。 由表2可知得到3个主成份,根据选定的累积贡献率,选取主成份F1、F2(包含了样本数据93%的信息),并由表3中系数矩阵写出相应主成份表达式。 表3 主成份系数矩阵Tab.3 Principal component coefficient matrix F1=-0.982yout(k)+0.982e(k)+0.401dec(k) (12) F2=0.187yout(k)-0.187e(k)+0.916dec(k) (13) 网络输入此时变为X3=[rin(k),F1,F2]T,网络结构为3-5-3,选取初始连接权、阈值: wi=[0.574 3,-0.125 3,-0.012 6; 0.296 5,-0.153 6,0.434 4; -0.446 6,0.167 2,0.121 2; -0.453 4,0.035 5,0.457 2; -0.537 7,0.310 9,-0.235 8] wo=[0.153 8,0.172 8,-0.298 2,-0.177 8,-0.515 6; -0.233 2,-0.454 3,0.145 5,0.258 2,0.079 9; 0.149 5,-0.267 5,0.322 1,0.153 0,-0.135 5] 仿真结果如图5所示。采用PID控制:kp=0.832,ki=0.224,kd=0.409在Simulink中仿真,同样给定频率设定为50 Hz,给定频率跟踪曲线如图6所示。从图6中可以看出,相较于常规PID该控制系统同样出现了严重的迟滞现象,所以采用高增益的PID控制器进行补偿,加大比例系数kp=8.32,ki=2.24,kd=4.09进行仿真。 图5 优化后参数自适应曲线Fig.5 Parameter adaptive curve after optimization 将BP神经网络PID控制系统优化前后仿真曲线放在同一张仿真图里进行比较,如图6所示(图中主成份-BP神经网络及BP神经网络PID参数均为高增益比例参数,图7亦同)。通过系统仿真对比可以看出(表4):系统采用主成份-BP神经网络-PID控制方式后,调节系统的控制性能相较于BPNN-PID控制除了超调量略大,其他动态性能均得到了明显的改善,且在9.31 s左右就能达到稳定状态。 图6 BP-PID优化前后仿真结果对比图Fig.6 Comparison of simulation results before and after BP-PID optimization σ/%tr/stp/sts/s常规PID65.643.204.9414.66BPNN-PID28.874.116.1713.75主成份-BP神经网络-PID44.743.555.169.31 注:σ、tr、tp、ts分别为超调量、上升时间、峰值时间、调节时间(下同)。 该工况仿真方法同工况一,各整定方案下PID参数如表5所示。 表5 工况二各整定方案PID参数Tab.5 The PID parameters of each setting scheme on second working condition 工况二(非额定工况)下各控制方案PID控制仿真图: 从图7和表6不难看出,在工况二主成份优化后的BP神经网络PID控制系统也获得了较好的控制效果。 图7 工况二各控制方案仿真曲线Fig.7 Simulation curves of each control scheme of the second working condition σ/%tr/stp/sts/s常规PID60.372.784.5913.12BP-PID6.474.375.849.83主成份-BP神经网络-PID06.836.836.83 从上面的结果来看,采用主成份优化的BP神经网络PID控制器对被控系统的控制效果明显好于常规PID控制、BPNN-PID控制,调节时间(或超调量)明显缩短(或降低),波动程度明显改善。 综上所述,我们将主成份优化后的BP神经网络PID控制进行了水轮机调节实例仿真试验,取得了较好的结果。该方法有效地弥补了BP神经网络算法收敛速度慢的影响,改善了控制系统跟踪性能,具有一定的实际意义。 □ [1] 袁海锋.PID控制器参数整定与自整定方法的研究[D]. 南京:南京工业大学,2007. [2] 侯树文, 王琳琳, 卢家涛,等. BP网络模糊PID控制在水轮机调速器中的应用[J]. 人民长江, 2008,39(2):79-80. [3] 许永强,刘万康.基于主成分-BP神经网络的我国农村居民用电量的预测研究[J].电力学报,2016,(2):162-166. [4] 李旭军.基于PCA方法的地理系统分析[J].赤峰学院学报(自然科学版),2011,(12):41-43. [5] 何继爱, 达正花. BP神经网络PID控制器仿真实现[J]. 兰州文理学院学报(自然科学版), 2005,19(2):31-34. [6] 陈铁华,李树刚.基于神经网络的水轮机调节系统非线性仿真[J].水电能源科学,2012,30(10):120-123,215. [7] 程远楚,张江滨.水轮机自动调节[M]. 北京:中国水利水电出版社,2010. [8] 卢礼华,郭永丰,大刀川博之,等.高增益PID控制器实现纳米定位[J].光学精密工程,2007,(1):63-68.1.2 主成份-BP神经网络-PID控制器
1.3 水轮机调速系统的组成及数学模型
2 算例仿真
2.1 工况一实例仿真


2.2 工况二实例仿真


3 结 语