智能化喷灌控制系统的设计与研究
2017-03-21邹一琴胥安东
张 兵,邹一琴,韩 霞,胥安东
(1.江苏大学流体机械工程技术研究中心,江苏 镇江 212013;2. 常州工学院电气与光电工程学院,江苏 常州 213002)
我国人均水资源总量不足世界平均水平的1/3,而且我国是发展中国家,随着工业用水、生活用水的增加,农业用水节水非常重要。因此提高水的利用率和水的生产效率,减少水的浪费,应用节水灌溉新技术、新方法来达到农业节水,从而达到扩大灌溉面积,提高粮食总产量的目的。智能化的农业生产符合我国可持续发展之路。农作物各个阶段的生长与土壤的湿度、实时的光照强度、大气温度等气候因素有很大的关系,在这些因素中土壤湿度是重要因素且具有易探测和调节的特性,土壤湿度具有诸多的特点。如果使用传统的控制方式,系统很容易出现很大的超调,严重情况下造成系统的不稳定,最终导致无法节水,并且当超调量超过一定值时,还会对农作物的生长造成影响。因此本次使用Mamdani控制模型来应对传统控制方法产生的问题。
1 系统硬件的设计
本次系统硬件部分分为基站的硬件设计和节点的设计。基站和节点的单片机选择STC89C52RC芯片,通信模块选择有线通讯RS-485。基站和节点系统硬件见图1、图2。
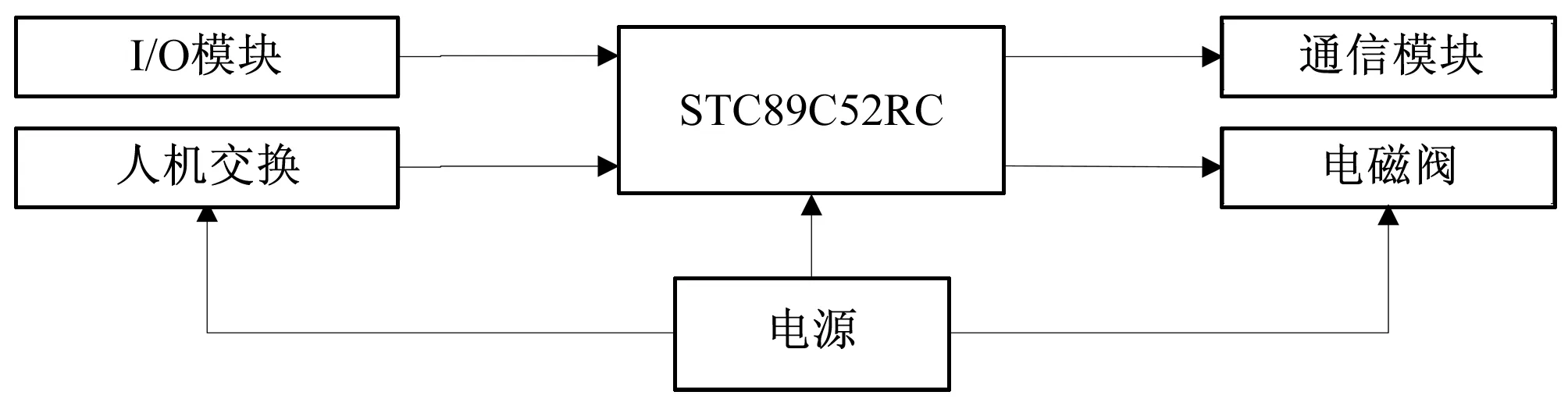
图1 基站系统硬件框图
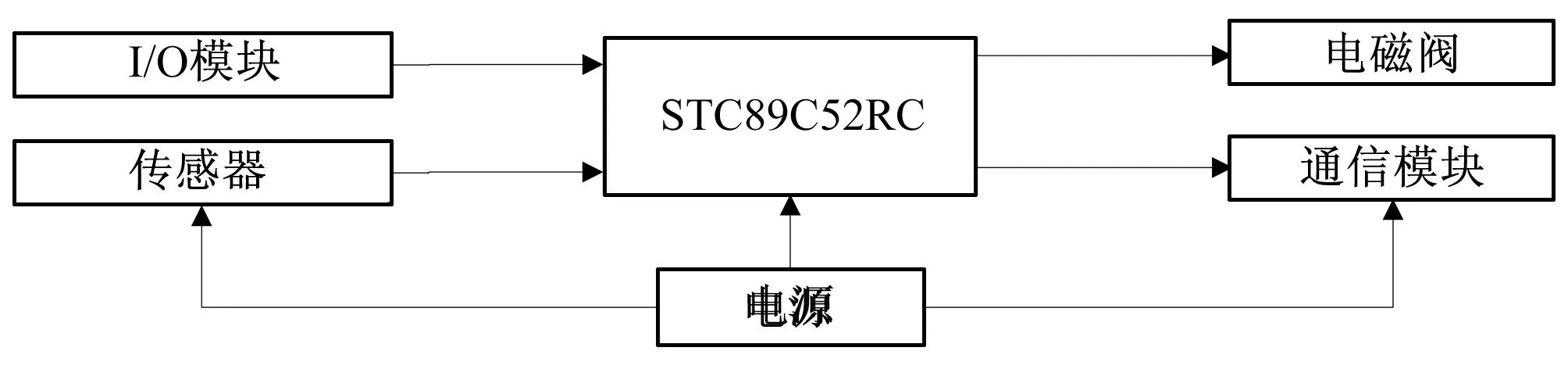
图2 节点系统硬件框图
基站的硬件结构主要由以下几个部分组成。
(1)单片机模块。使整个微控制器STC89C52RC正常工作的模块,主要包括晶振电路(使用12 MHz的晶振)、复位电路(带手动复位的高电平复位)。
(2)通信模块。主要用于与各节点进行数据和指令交换,主要通过发送相关的指令并随后接受来自节点的数据,本次主要使用RS-485通信协议。
(3)I/O模块。用于控制通信模块。
(4)人机界面。主要包括液晶显示屏(12864液晶)以及相关的按键电路(电路包括3个按钮,分别为生长周期增、减以及确认按钮),目的是用于用户的参数设定以及数据的实时监控。
(5)电磁阀。接受来自单片机的控制指令,控制电磁阀门的开关从而达理想的灌溉效果。
(6)电源。主要用于提供5 V电压。
图2为各节点的硬件框图,除了人机界面,基站拥有的硬件它也拥有,而且还多了一个用于采集土壤湿度的传感器模块。
1.1 继电器及电磁阀
电磁阀模块主要通过单片机的信号来控制电磁阀门的开与关,低电平时继电器吸合。二极管D1用于当继电器断开状态时提供放电线路避免继电器线圈上出现很大反向电压,电压过高可能导致三极管的损坏。具体电路设计见图3。
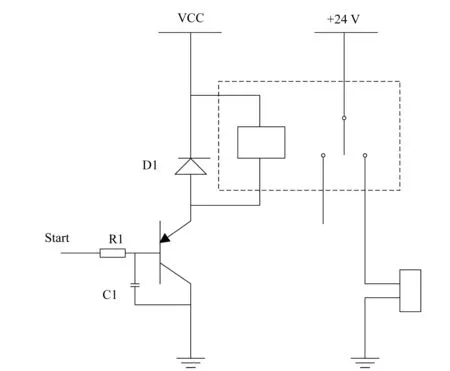
图3 继电器连接图
1.2 传感器模块
农作物主要从土壤中获得所需水分,节水灌溉中土壤的水分是最为重要的数据。节点部分通过传感器收集到实时的土壤含水量的数据并且通过通信模块发给基站,基站通过对节点发送过来的实时土壤含数量进行分析,跟最佳的土壤含水量进行比较,从而得出土壤湿度的差值以及土壤湿度的变化率,并且将这2个数据模糊化从而作为控制器的输入,经过模糊推理后将输出反模糊化从而控制电磁阀门的开关,确保在满足农作物的生长水分的前提下,节约用水。因此具有高精度的土壤墒情传感器非常重要。
目前经常使用的土壤湿度传感器有FDR型以及TDR型,比较流行的是FDR型。本次设计使用颐信科技的TH-FDR2000型土壤水分传感器。
由于单片机本次选用的不自带AD转化模块,且土壤水分传感器传输过来的是单片机无法识别的模拟信号,因此需要外接一个AD模块,考虑到精度以及转化时间选用ADC0804芯片。
2 冬小麦需水分析
冬小麦在不同的生育阶段对于水分的需求是不同的,实时适量的灌溉不仅能够节约大量的农业用水,而且也能提高小麦的产量以及品质。根据冬小麦在不同的生育期的水分胁迫指标,把冬小麦的生育期划分为苗期、返青期、拔节、抽穗和灌浆期。通过查阅相关资料得到冬小麦各生育阶段高效的灌溉指标。冬小麦各生育阶段适宜的土壤含水量及根系湿润层深度见表1。
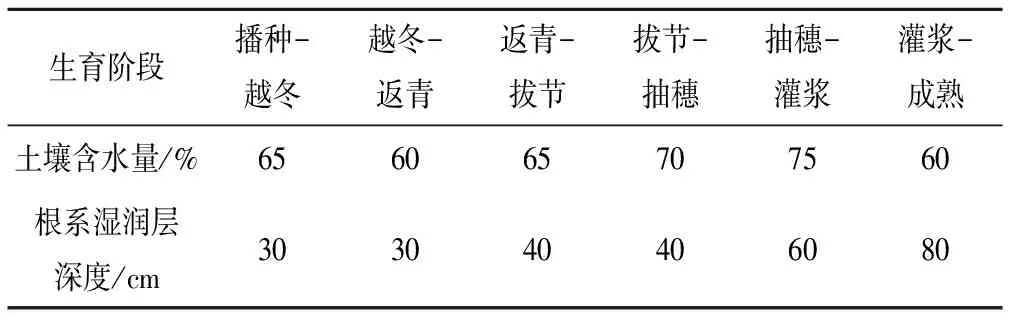
表1 冬小麦各生育阶段适宜的土壤含水量及根系湿润层深度
3 模糊控制器设计
3.1 模糊控制器结构
模糊控制器结构见图4。从图4中可以知道系统有2个输入参数,其一为土壤湿度差值E,另一个为土壤湿度变化率EC。只有1个输出参数,即灌溉时间T。土壤湿度差值以及土壤湿度变化率的定义如下:
E=当前土壤湿度-当前生长阶段最佳的土壤湿度
EC=本次采集的土壤湿度-上次采集到的土壤湿度

图4 模糊控制器结构
将冬小麦各生长阶段的最佳土壤湿度考虑进去,设土壤湿度偏差论域为[-15%,15%]。在这个范围内包含了土壤干燥、土壤湿度适合以及土壤过湿。考虑到根系湿润层厚度,将能够测量土壤湿度的传感器放入土壤55 cm处。由于土壤湿度具有极大的惯性,通过实验可知土壤湿度在灌水后需要40 min才能变化,因此每隔40 min进行一次数据采样。通过之前实验可知土壤的湿度变化在20%以内,因此土壤湿度变化率的论域设定为[-20%,20%]。通过实验可知土壤湿度达到上限需要40 min,因此T的论域为[0,40]。
3.2 确定语言变量
采用的语言变量有7个,既可以满足系统要求也可以使控制效果良好。输入、输出变量见表2。
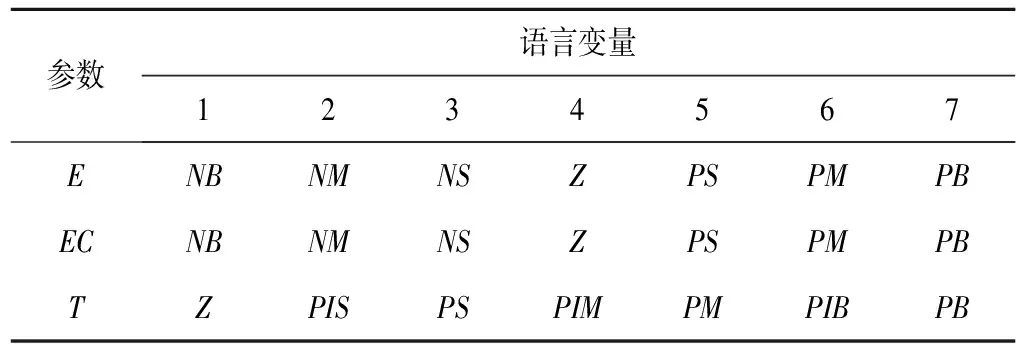
表2 语言变量
土壤湿度差值的语言变量划分成7个:负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB),其中Z表示土壤处于最佳的湿度;NS、NM、NB表示土壤的湿度递减;PS、PM、PB表示土壤湿度递增。土壤湿度变化率的语言变量同样划分成7个:负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)、正大(PB),其中Z表示土壤的湿度没有变化。NS、NM、NB表示土壤的湿度递减速度逐步增加;PS、PM、PB表示土壤湿度递增速度逐步增加。灌溉时间的语言变量也是划分成7个:零(Z)、倾向于时间短(PIS)、时间短(PS)、倾向于时间中等(PIM)、时间中等(PM)、倾向于时间长(PIB)、时间长(PB),Z表示电磁阀不开启;PIS、PS、PIM、PM、PIB、PB表示电磁阀开启时间逐步增加。
模糊逻辑控制器由3个核心部分组成:D/F(模糊化)模块、近似推理、F/D清晰化模块。为了使它们能跟输入、输出的清晰量相匹配,在模糊化模块之前设有“量化因子”模块,在清晰化模块之后设有“比例因子”模块。
(1)量化因子:
E=6/15=0.4
EC=6/20=0.3
(2)比例因子:
T=40×60/6=400
为了简化模糊变量的赋值以及相应的模糊规则相应表的制作,将变量的论域改变成表3形式。

表3 输入、输出变量的模糊集合论域
3.3 确定语言值的隶属函数
模糊语言值实际上是一个模糊子集,而语言值最终是通过隶属度函数来描述的,即模糊化。语言值的隶属度函数又称为语言值的语义规则,它可以以连续函数的形式出现,也可以以离散的量化等级形式出现,应该说他们都有各自的特色,例如连读的隶属函数描述比较准确,而离散的量化等级描述比较简洁、明确。在控制系统中常见的几种隶属度函数有三角形函数和高斯型。隶属函数选用三角形函数来描述,具体见图5、图6、图7。
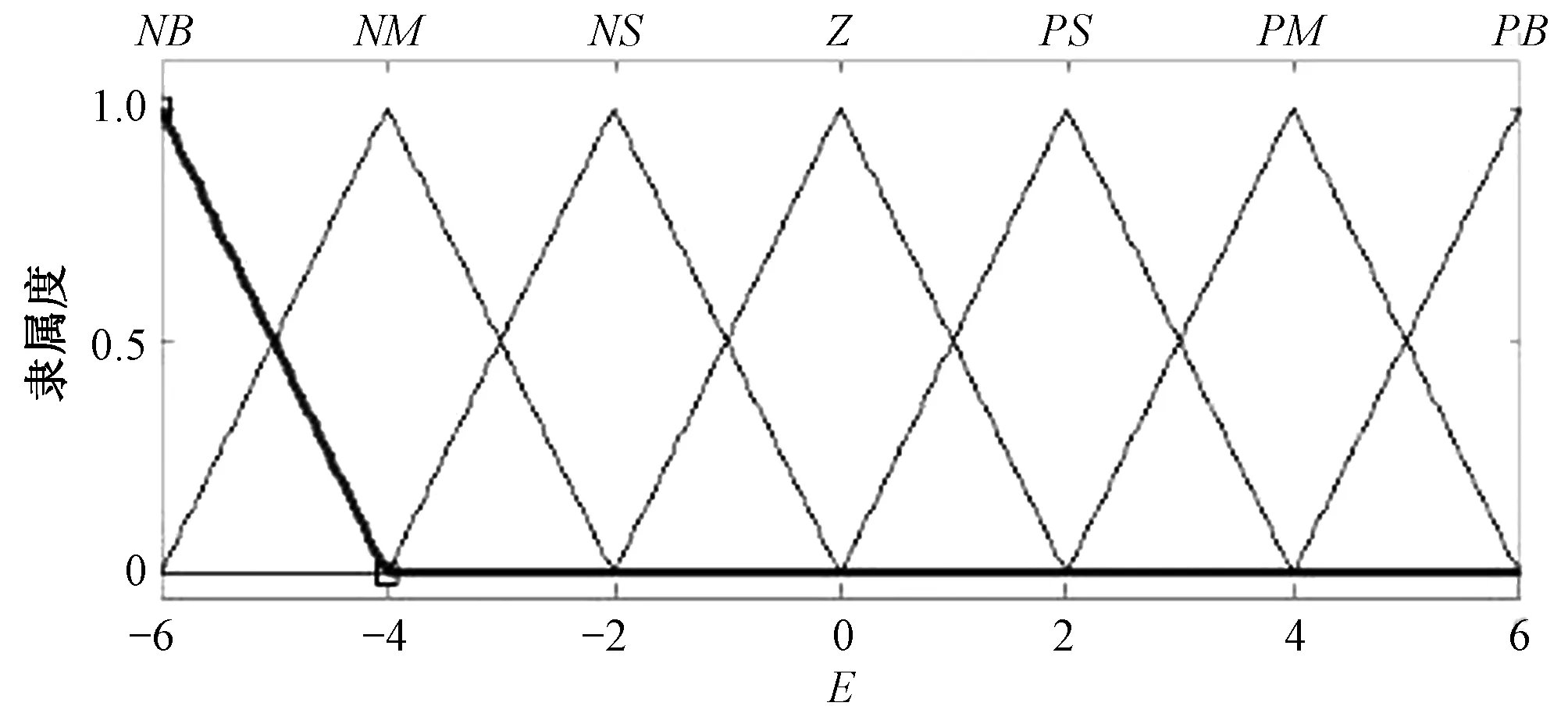
图5 E的隶属度函数
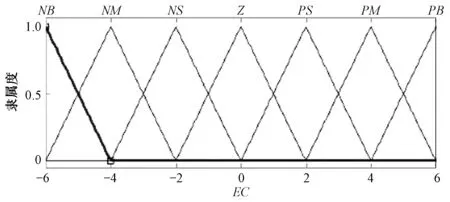
图6 EC的隶属度函数
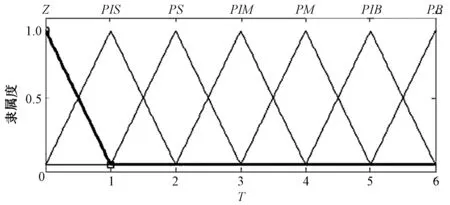
图7 T的隶属函数
3.4 建立模糊控制规则
使用经验归纳法来建立模糊控制规则。经验归纳法就是依据人类的控制经验以及个人的直觉加上推理,经过整理、归纳和提炼一系列的行为后形成的方法。
控制经验、策略需要操作人员在生产实践中边学习边思考从而获得。模糊控制能够成为智能控制的重要分支的原因在于其拥有实用性,这种实用性建立在对人类行为的描述。模糊控制规则见表4。

表4 模糊逻辑控制规则
具体的模糊逻辑控制表的规则如下:
(1)若土壤湿度大于最佳的土壤湿度,则无论土壤湿度变化率如何变化,电磁阀都不开启。
(2)若土壤湿度等于最佳的土壤湿度,则当土壤湿度有变干燥的趋势即土壤湿度变化率负增长时,打开电磁阀,NS到NB对应PIS到PIM,其他情况不打开电磁阀。
(3)若土壤处于较缺水状态,则当土壤湿度没有处于变更湿的状态打开电磁阀,Z到NB对应PIS到PM,其他情况不打开电磁阀。
(4)若土壤处于中度缺水时,则当土壤湿度的变化率处于PB时,不打开电磁阀,其他情况打开电磁阀,PM、PS到NB对应PIS、PIS到PIB。
(5)若土壤属于极度缺水,则土壤变化率处于PB、PM到NB时对应PIS、PIS到PB。
3.5 在单片机中实现模糊逻辑控制表
由于外部输入都是很精确的量,因此首先要将输入量模糊化处理,再根据模糊逻辑控制表求出结果再反模糊化控制电磁阀。
将E、EC的论域设定为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],T的论域设定为[0,0.5,1,1.5,2,2.5,3,3.5,4,4.5,5,5.5,6]。
根据表5、6、7可以推算出对应的模糊控制相应表,见表8。
3.6 模糊控制器程序设计
整个流程图见图8,说明如下:
(1)基站通过节点传输过来的数据进行处理,得出土壤湿度差值E以及土壤湿度变化率EC,然后对E、EC进行模拟化。
(2)首先判断E是否在[-15%,15%]之间,超过上下限则
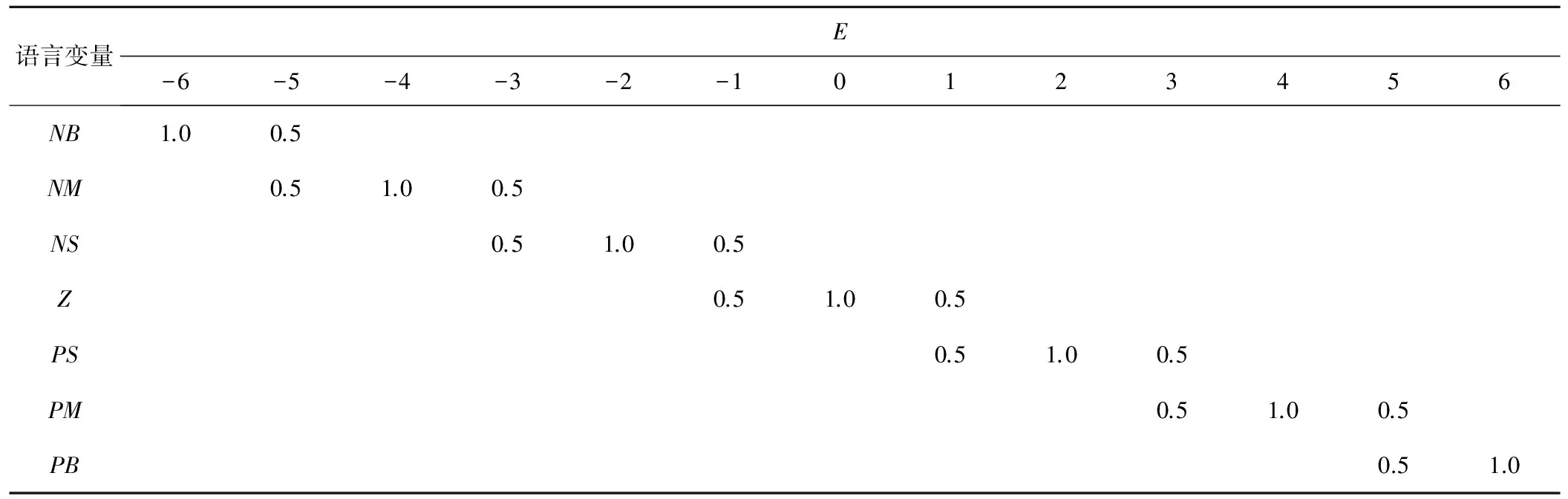
表5 E的赋值
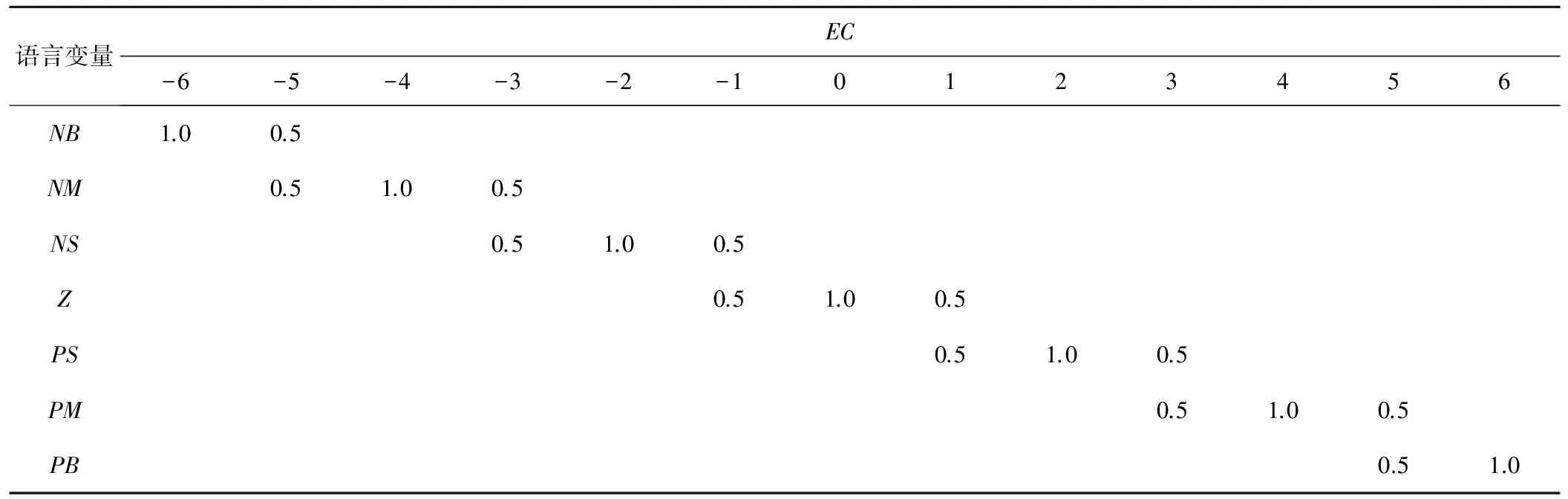
表6 EC的赋值

表7 T的赋值
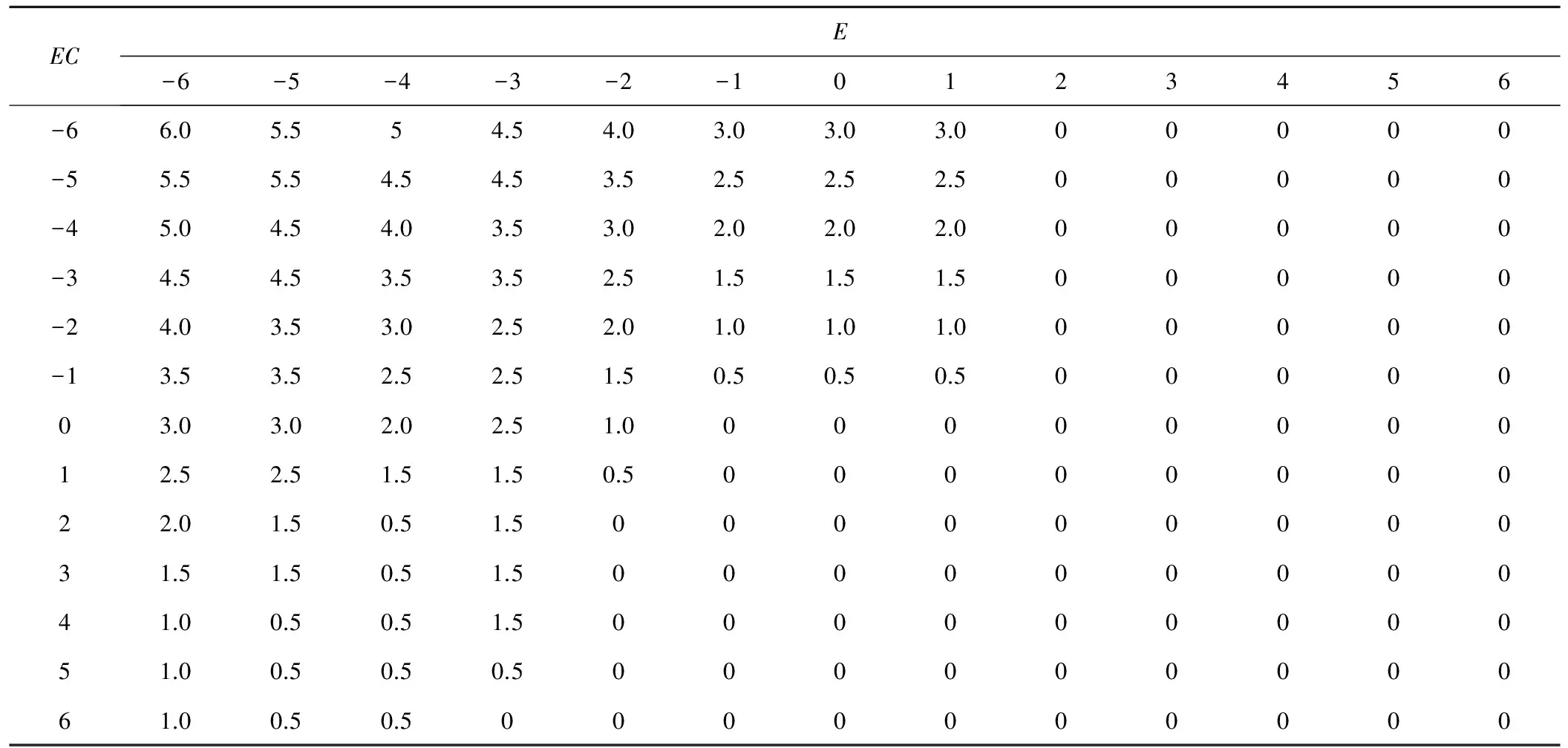
表8 模糊规则
限定为-15%或者15%。
(3)然后判断EC是否在[-20%,20%]之间,超过上下限则限定为-20%或者20%。
(4)将E、EC模糊化。
(5)对照模糊响应表得出T。
(6)将T反模糊化处理。

图8 模糊控制流程
4 仿真及结果分析
本次Mamdani控制模型共有31条规则,分别如下:①if (ECisNB) and (EisNB) then (TisPB);②if (ECisNB) and (EisNM) then (TisPIB);③if (ECisNB) and (EisNS) then (TisPM);④if (ECisNB) and (EisZ) then (TisPIM);⑤if (ECisNM) and (EisNB) then (TisPIB);⑥if (ECisNM) and (EisNM) then (TisPM);⑦if (ECisNM) and (EisZ) then (TisPS);⑧if (ECisNS) and (EisNB) then (TisPM);⑨if (ECisNS) and (EisNM) then (TisPIM);⑩if (ECisNS) and (EisNS) then (TisPS);if (ECisNS) and (EisZ) then (TisPIS);if (ECisZ) and (EisNB) then (TisPIM);if (ECisZ) and (EisNM) then (TisPS);if (ECisZ) and (EisNS) then (TisPIS);if (ECisPS) and (EisNB) then (TisPS);if (ECisPS) and (EisNM) then (TisPIS);if (ECisPM) and (EisNB) then (TisPIS);if (ECisPM) and (EisNM) then (TisPIS);if (ECisPB) and (EisNB) then (TisPIS);if (ECisZ) and (EisZ) then (TisZ);if (ECisPS) and (EisNS) then (TisZ);if (ECisPS) and (EisZ) then (TisZ);if (ECisPM) and (EisNS) then (TisZ);if (ECisPM) and (EisZ) then (TisZ);if (ECisPB) and (EisNS) then (TisZ);if (ECisPB) and (EisZ) then (TisZ);if (ECisPB) and (EisZ) then (TisZ);if (ECisPS) then (TisZ);if (ECisPM) then (TisZ);if (ECisPB) then (TisZ);if (ECisNK) and (EisNS) then (TisPIM)。
通过MATLAB进行仿真,结果见图9。
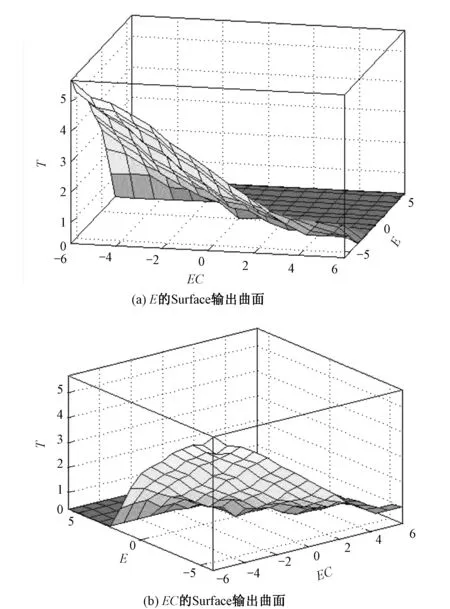
图9 Surface输出曲面
从图9可以看出,当土壤湿度处于过湿的时候,电磁阀不会开启,当土壤湿度越干,且干旱程度持续恶化的情况下,电磁阀开启时间越长。
5 结 语
本系统主要通过土壤的湿度来判断是否对冬小麦进行灌溉,在满足冬小麦生长的前提下节水。但像空气中的湿度、光照强度、大气温度等因素都可能对最后的结果造成极大的影响。本系统主要应用于冬小麦,无法适用于其他作物,因此整个系统还需要进行改进。可以将各种外部因素作为输入加入进去,以增加系统的可靠性。此外还可以再建立一个常见的农作物的库,可以适应更多的地区作物。
[1] 靳兆荣, 徐敏杰, 魏学良,等. 基于模糊决策的自动节水喷灌控制器的设计[J]. 排灌机械工程学报, 2004,22(5):26-28.
[2] 郑为键. 花卉栽培用微喷灌智能温室控制系统的研制[J]. 节水灌溉, 2005,(4):24-25.
[3] 肖传晶, 田海清, 刘海洋,等. 基于模糊决策的温室喷灌控制系统仿真研究[J]. 中国农机化学报, 2014,35(2):254-258.
[4] 左 来. 基于模糊神经网络的喷灌控制系统设计及实现[J]. 农机化研究, 2009,31(11):169-171.
[5] 张舒哲, 叶 桦, 冒建亮,等. 基于CAN总线的智能喷灌远程控制系统[J]. 中南大学学报(自然科学版), 2013,(Z1):292-296.
[6] 王昌伟, 朱德兰, 张 林,等. 基于DSP和ARM的人机交互绞盘式太阳能喷灌机控制系统设计[J]. 节水灌溉, 2015,(7):76-80.
[7] Feng G. A survey on analysis and design of model----based fuzzy control systems[J]. IEEE Transactions on Fuzzy Systems, 2006,14(5):676-697.
[8] Wang X, You G, Yang S. Fuzzy control model study on precision irrigation system for water stress in crops[J]. Journal of Computers, 2011,6(5):955-962.
[9] Guo Z Q, Wang Y M, Yang W Z, et al. Intelligent irrigation control system based on fuzzy control[J]. Journal of Agricultural Mechanization Research, 2006,(12):103-105,108.
[10] Nakano K, Aida T, Motonaga Y, et al. A study on development of intelligent irrigation systems for melon cultivation in greenhouse[C]∥ AFITA. Asian agricultural information technology & management: proceedings of the third Asian conference for information technology in agriculture. Beijing, China:2002:338-342.