军用特种飞机任务系统架构技术发展研究
2017-03-21李超强刘晓敏
李超强,刘晓敏
(中国电子科学研究院,北京 100041)
0 引 言
任务电子系统是特种飞机执行作战任务的主要物质基础。技术的不断发展和需求的不断调整为特种飞机的任务电子系统带来了如下的增长需求:性能,传感器类型,功能,成本,综合化,复杂性,可重用性,软件程序,内存需求,吞吐量,数据处理,数据链;而减少了如下的约束:系统的体积,重量,功耗和技术限制[1]。以技术发展与战略需求为牵引,开展军用特种飞机电子系统的关键技术研究是当前迫切的任务,同时,对特种飞机任务系统的未来发展趋势进行预测,可以为特种飞机任务电子系统的研制储备与应用提供指导。
1 任务系统的架构特征及其演变
1.1 航电系统和任务系统架构技术发展历程
1.1.1 航电系统架构技术发展
以预警机、侦察机、干扰机等为代表的特种飞机从上个世纪出现以来,已经经历了八十余年的历史。在特种飞机任务系统的概念提出之前,航空电子的概念是20世纪30年代所提出,航空电子指飞机上所有电子系统的总和,航空电子的范畴包括支持飞机完成其任务使命的所有与电子学相关的系统和设备。航空电子系统架构技术共经历了4代的发展[2-4],分别是分立式架构,联合式架构,综合式架构和先进综合式架构技术。分立式航电系统架构是完成各个功能的航空电子子系统都具有从传感器、信号采集、处理直到显示和控制一套完整和独立的系统功能设备。系统是高度分散化,各个子系统的之间资源不能共享,系统资源利用是独立的。联合式系统架构相比于分立式系统架构,最大的特征是系统对总线技术的应用,分系统通过集成到总线实现分系统之间的通信,分系统采用标准计算机与计算机语言实现其功能,总线的使用减少了系统互连的线缆,简化了系统之间的连接。综合化航空电子系统提出了分区的概念,将系统分为传感器区、信号处理区、任务管理区和飞行管理区,实现系统高度综合化、通用化和模块化特点。先进综合式系统的架构的主要技术创新体现在:开放的系统架构、射频与光电孔径综合以及传感器预处理综合、统一航电网络、商用货架(Commercial Off The Shelf,COTS)产品和技术的应用[2]。
1.1.2 任务系统架构技术发展
预警机作为军用特种飞机中一类重要机型,在现代战争中起着先锋与统筹规划的作用,担负着全方位监控防区范围,增加预警时间,对对方构成威胁,对己方作战飞机及时引导、指挥,增加作战范围。论文以预警机作为特种飞机的研究对象。
预警机最初的定位是指装有机载监视雷达、用于探测低空飞行目标的特种军用飞机。预警机主要由任务电子系统和载机平台两大部分组成。其中,任务电子系统是为了完成作战功能的各种软硬件的集合,包括获取特定信息的传感器、用于支持信息传输的各种通信链路和用于信息处理的各种电子设备[5-6]。预警机自19世纪40年代出现以来,其任务系统主要经历了三代发展,其三代发展的技术特征如表1所示[7]。
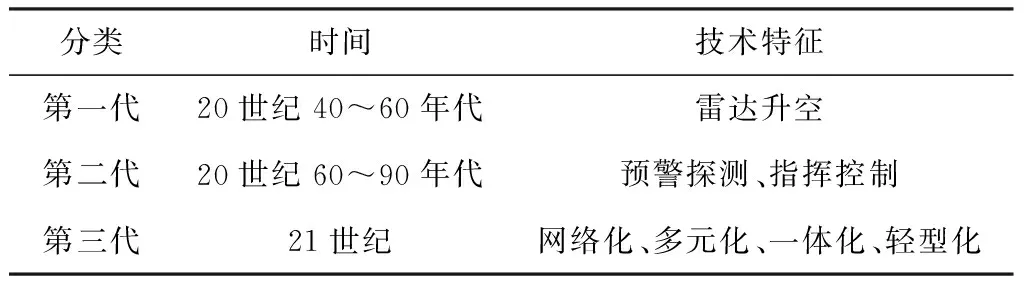
表1 三代预警机技术特征比较
(1)第一代预警机任务系统架构发展
20世纪40年代是第一代预警机起始的节点,第一代预警机为了解决低空预警问题,采用雷达升空的手段。此时雷达是预警机唯一的传感器,系统的探测手段较为单一。第一代以配置雷达为传感器的电子系统还不能被称为严格意义上的任务系统,由于这一时期的载机航电系统多是分立式的系统架构,分系统都具有从采集、处理到显示的设备,在载机上加装的任务系统雷达也按照这一思路发展。因此,第一代预警机任务系统也属于分立式系统的架构模式。E-1B和E-2A/B预警机属于典型的第一代预警机。
由于技术手段的限制,第一代预警机任务系统传感器类型单一,更多的是单装备执行作战任务,缺乏资源功能的能力,缺乏多种探测能力,采用语音通话技术也缺少与编队的协同作战能力。
(2)第二代预警机任务系统架构发展
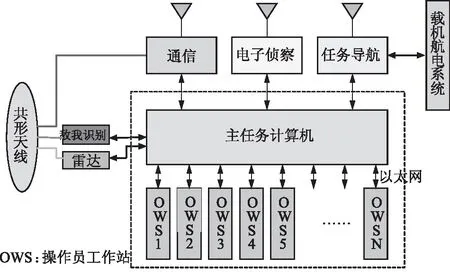
图1 PHALCON预警机系统架构示意图
第二代预警机从20世纪60年代开始发展。由于计算机技术、电子技术的进一步发展,第二代预警机任务系统配备了多种类型的传感器,探测手段更加丰富,预警机的探测距离也随之增加。这一代预警机任务系统采用了专用计算机以及网络技术,使得任务系统的所有子系统能够实现部分资源共享能力,属于联合式系统架构。分系统通过集成到总线网络实现分系统之间的通信,分系统采用专用计算机与计算机语言实现系统的功能,而总线网络的使用减少了原系统点到点互连所有使用线缆的数目,并简化了系统设备之间的连接关系。E-2A、E-3和PHALCON预警机是典型的第二代预警机。图1是PHALCON预警机的系统架构示意图。PHALCON预警机第一次采用了商用以太网技术作为任务系统的集成方法,构建了任务系统开放式体系架构的雏形。基于以太网技术的系统架构能够实现任务系统的可扩展和可升级能力,并且便于系统的维护。同时,任务系统采用主任务计算机作为系统管控任务执行的服务器,实现了系统资源的综合应用,提高了系统运算能力。E-3预警机在后续的升级改造中最重要的需求是采用开放式系统架构。
第二代预警机任务系统使得预警机执行作战任务的能力由单装备向平台中心发展,使得预警机在单一的预警探测能力基础上增加了指挥控制能力。通过系统的通信设备和军用数据链实现与战斗机以及其它特种飞机的互连互通能力,奠定了预警机作为通信和指挥平台的基础,也证实了预警机作为空基体系组成的核心节点的重要作用。
(3)第三代预警机任务系统架构发展
第三代预警机从21世纪作为发展起点,E-2D是第三代预警机的典型代表。随着信息系统技术的进一步提升,E-2D预警机任务系统的设计完全遵从开放式系统架构的要求,采用了COTS产品技术,配备了商用机载计算机和光纤网络,具有更强的数据计算处理能力和数据传输能力。同时,E-2D任务系统配置了更多元化的传感器,对雷达、天线、通信系统以及战术座舱和显示系统进行了重大改进[16]。E-2D装备的协同交战能力(Cooperative Engagement Capability, CEC)系统与航母指挥中心以及“宙斯盾”驱逐舰能够实现互通性能力,并能够共享航母编队所有配备CEC设备的平台所发现的目标,通过对目标进行数据融合、综合处理,形成统一的态势图,提高系统的对目标定位的准确性,提高战场环境的空情感知能力,并有效的提高系统的作战效能,使得预警机具有更强的网络化协同作战能力和指挥控制能力。
第三代预警机任务系统使得预警机执行作战任务的能力由平台中心向网络中心发展,重点升级改进了任务系统的通信和网络能力。预警机在网络中心战中承担着预警指挥、战场管理、防空反导以及通信中继的作用,是名副其实的空中指挥所。
1.2 预警机任务系统与载机航电系统比较分析
由于作战环境的严酷性以及作战任务的多样性,军用飞机系统设计较为复杂,对系统的性能和指标要求更为严苛。军用飞机系统架构常分为航电系统,任务系统,推进系统[1],以预警机为例,其系统架构如图2所示。
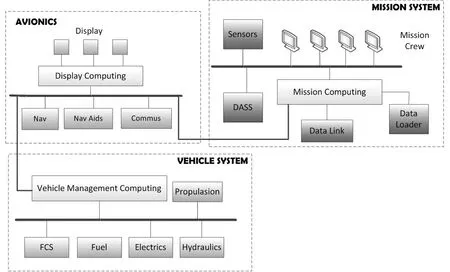
图2 典型预警机系统架构示意图
由于预警机出现于1945年,晚于战斗机的出现时间,其架构技术整体上少发展一代。预警机最初是由已有型号运输机改装而成,预警机任务系统的设计与发展是基于航电系统而来的。因此,预警机任务系统与载机航电系统的架构技术发展相似又不同,两个系统的比较如下:
架构发展脉络相同:航电系统和任务系统本质上来说都是机载电子系统,本质上都是通过电子设备完成信息采集、处理、传输和显示的功能。随着微电子和计算机以及网络的不断发展,机载电子系统也在不断升级。航电系统架构的四代发展对任务系统架构的发展具有借鉴与指导意义。
功能目标不同:预警机任务系统是为了完成“预警探测、指挥引导”这一特种功能而集成的电子系统。载机航电系统是为了保障飞机飞行安全而集成的电子系统。任务系统实现了预警机的核心功能,载机航电系统为预警机任务系统提供了搭载传感器的平台。
传感器数目不同:预警机担负着任务的多样性,使得任务系统需要配置更多元化的传感器与通信手段,通过以多数据链综合应用为手段实现预警机作为空中骨干网的关键节点,进而满足预警机在体系化作战的信息需求。
计算能力不同:功能目标的不同使得任务系统配置的传感器类型多,任务种类多,因此任务系统要处理的数据量要远高于航电系统的数据量,使得任务系统设计要保障处理平台具有高速处理与存储能力。因此,系统需要采用以云计算、分布式计算等高性能计算方法实现更优化的计算能力,使得信息存储无损性、处理无阻性、显示实时性。
网络选型不同:任务系统网络是从交换式的以太网起始的,网络性能要优于早期低带宽的航电总线网络。任务系统网络设计需要能够支撑大数据量的高速信息传输。因此,在网络选型的论证过程时,任务系统需要高带宽、高处理能力、高容错能力和高扩展能力的网络,航电系统需要强实时和高可靠的网络[11]。
2 新一代架构的关键技术及其未来发展
2.1 任务系统关键技术分析
2.1.1 开放式系统架构
M1L-STD-499B中定义:开放式系统结构通过对接口、服务和支持形式等采用充分定义的、广泛使用的、公众支持的非专利规范,以完成系统功能的物理和逻辑实现,这样能以最小的更改就可以在很广的系统范围内合理地使用工程组件。在军用特种飞机任务系统中要使用采用开放式系统结构最直接的理由是为了降低系统的开发成本并提高经济可承受性。开放式系统结构的实现是以提高系统寿命期内各个阶段的经济可承受性为基础的。开放式的机载电子系统结构标准体系应包括:软件标准、公共功能模块标准、通信与网络标准、封装与接口标准、综合传感器标准以及系统级标准[8]。实现开放式系统架构的关键是COTS技术的应用,COTS实现是指COTS标准及其产品应用于政府系统或军用产品所需采取的技术措施和管理措施[9]。应用COTS技术能够实现系统开放的技术标准,对产品的维护和保障较为方便,并且能够大幅的降低系统的成本。
2.1.2 综合化与模块化
随着任务系统需求的演化发展,系统功能集成的能力也在不断的提升。任务系统发展的初期,完成不同功能的子系统之间是离散的,尽管子系统之间有消息交互,但各个子系统相对独立,每一个子系统的工作并不影响其他子系统的功能。随着技术的进步,子系统需要完成的功能不断增加,使得组成系统的子系统的边界划分没有严格的界限。由于更多复杂的任务需求的出现,子系统的数量也在不断增加。更强的数据处理能力和更高的网络带宽提供更强的数据处理能力,使得系统设计的趋势是向综合化方向演进。任务系统的发展是进一步集成化,模糊传感器功能边界,能够共享更多的数据资源。任务系统综合化的概念体现在射频综合化、处理综合化和显示综合化,而模块化是系统实现综合化技术的基础,模块化的基础是设计与研发的标准化,系统综合化能力通过标准模块之间的组件动态重构能力实现。综合化和模块化技术能够使得任务系统的资源进一步优化,并进一步降低系统的重量、空间和功耗,因此,系统设计需要考虑综合化与模块化技术。
2.1.3 机载高速网络技术
考虑到组成特种飞机的各个功能子系统内部和功能子系统之间都存在着各种类型信息的传输需求,系统信息传输不仅对网络带宽和传输时延的要求不同,对网络容错和可靠性的要求也不尽相同,会造成系统软硬件开发的复杂性、开发周期和费用的上升。
任务系统网络设计的目的是尽量减少机上网络的布线数目以减轻系统重量,降低节点互连的复杂程度以便于系统的故障排查,系统网络设计原则是以尽量少的网络类型完成任务系统所有信息的传输。由于任务系统前端传感器采集的信号数量级远高于系统显示的数据量,所以任务系统采用两种主干网实现系统的互连,包括前端传感网以及后端的数据核心网。传感网用于传感器内部以及传感器与信号处理器之间的网络互连,可考虑InfiniBand,RapidIO网络等。核心数据网用于数据处理器之间与数据处理器与显控设备之间的网络互连,可考虑万兆以太网,FC网络等。任务系统的网络设计趋势之一是传感网与数据核心网的统一融合,实现高速的统一机载网络,以一种网络满足机上所有信息的互连需求[10],具有可扩展性以及高速、可靠的传输能力。
2.1.4 软件可重用能力
为减少配置子系统个数,节省军用特种飞机的重量、空间和功耗,提高系统的资源利用率,并为未来系统的升级预留资源,特种飞机系统架构越来越多地利用软件取代硬件实现任务系统的功能,实现“软件定义一切(Software Define Everything)”的发展趋势。但实现特种飞机任务系统的功能实现,系统软件的工程量越来越大,对软件的开发、测试、维护需要耗费巨大的人力物力,因此,开展可重用软件的研究非常有必要。硬件模块化的发展能够实现硬件的标准化能力,为软件的升级迭代提供更好的基础平台,不同的软件设计开发者能够通过标准化的底层驱动接口和通信协议共享软件代码。不同的任务规划程序、传感器处理程序、情报融合程序、目标识别程序,态势生成程序等等能够实现成为成熟的产品化能力,同时减低功能开发的难度,开发成本集中在任务系统的任务层。
2.2 任务系统未来发展趋势
新技术的不断涌现对军用特种飞机的发展产生了重要的影响。当前军用特种飞机的架构技术发展历程是由定制化的专用技术向通用技术的演化。未来新技术的应用,使得特种飞机的系统架构技术会再向专用技术演进。面向服务架构技术、物联网技术和战场网络技术是军用特种飞机系统的发展方向,使得任务系统架构向智能化与协同化演进。
2.2.1 面向服务技术的应用
网络中心战中所有的平台资源是分布和异构的军事资源系统,实现网络中心战中所有作战单元和系统之间的高效通信和资源共享能力是未来系统的发展方向。要获取战争的主动权,要求所有平台装备的各功能系统之间实现综合集成能力,从而将多有作战单元及系统连成一个统一有机的整体,从而提高系统的作战效能,保证在作战中获取信息优势,实现信息战的能力。为了解决作战单元平台之间的信息互连问题以及信息孤岛问题,系统采用面向服务架构(Service Oriented Architecture, SOA)完成作战单元系统内部、跨系统、跨平台的任务功能的整合。SOA提供“以业务为中心”的服务,即将应用程序不同的功能单元封装为服务,通过对服务的接口定义实现系统功能之间的松耦合,即服务可以独立于硬件平台和操作系统[17]。通过采用SOA技术的应用,能够将各类作战单元的资源以服务的形式封装,调整和调用服务间交互过程保证系统功能的实现,快速灵活地适应作战过程和作战环境的变化。
2.2.2 物联网技术的应用
由于物联网的飞速发展,M2M(Machine to Machine)技术和无线传感器网络的日渐成熟,特种飞机系统将会向智能模块化的方向发展,为了满足未来作战的需要,特种飞机系统系统性能需求是大量采集飞机内部和飞机外部的各种数据,并对其进行融合处理,形成对战场环境的正确评估,以及实现对其他特种飞机和武器系统的进行智能化控制。
M2M技术中包括基于802.11b/g、UWB、Zigbee、RFID和Bluetooth的近距离连接技术;基于GSM/GPRS/UMTS的远距离连接技术;基于GPS、无线终端和网络的位置服务技术[12,13]。
首先,功能模块之间可以采用近程无线通信,完成信息传输与交换或模块互连的备份,近程无线通信能够减少设备间的连接链路,从而减轻特种飞机系统的重量,减小系统体积,降低系统的功耗。
其次,利用RFID技术,在军用特种飞机系统模块制造、物流运输、设备管理过程中能够得到应用前景,实现特种飞机系统生产的智能化管理。
再次,远距离连接技术是实现网络化战场的手段,通过远距离收集信息、设置参数和发送指令,充分实现军用特种飞机系统在战争网络中的核心枢纽作用。
最后,基于GPS、ADS-B、卫星通信技术实现特种飞机系统的定位,地面指挥所能够实时监测到军用特种飞机系统编队的位置,提高飞机飞行的安全性。
2.2.3 战场网络的应用
现代作战模式在以平台中心站向网络中心战转变。平台是指装载武器、传感器及其它电子设备的卫星、特种飞机、舰船和战车等平台[14]。在传统的平台战概念中各平台主要依靠自身的传感器和武器进行作战,平台之间一直存在着有限的信息共享。网络中心战是美国海军根据未来战争的特点,借用商业上成功的网络运行经验于1997提出的。美国海军认为在未来战争中海军要遂行打击从岸边直至内陆纵深数千千米范围内的目标,为海军陆战队和陆军提供火力支援,夺取制空权以及进行对战区导弹的防御等多种作战任务。传统的以平台为中心的作战方式难以致胜,所有的单平台装备必须采用先进的信息技术互连,实现所有平台设备的信息共享,最大效能的共同作用,赢得战场的先机。特种飞机平台、在轨卫星、地面作战以及其他所有装备协同作战,整个网络中心战的所有参与者组成了一个分布式网络,网络中心战示意图如图3所示[15]。网络中心战使得大系统的信息与资源高度共享,不同的平台之间通信具有高速、大容量、实时并且可靠的传输能力。特种飞机系统能够充分又全面的了解整个战场态势,有助于先敌采取行动,实施精确打击和联合作战。
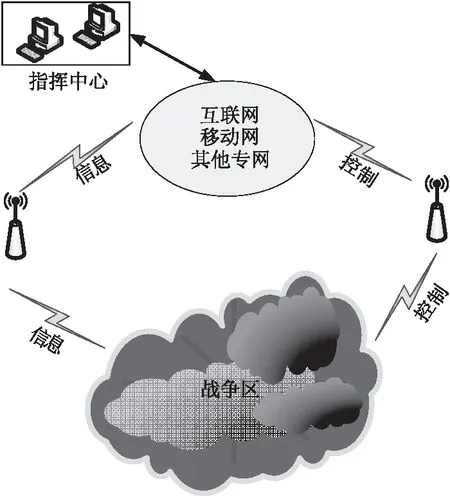
图3 网络中心战示意图
3 结 语
为了满足未来战场环境的需要,军用特种飞机任务电子系统需要采用更有效的设计方法开展工程研制。军用特种飞机任务电子系统的设计是依据系统架构技术所完成的。论文总结了当前军用飞机航空电子系统与任务电子系统体系架构的发展历程,提炼了系统体系架构演进过程的关键技术。其中,系统要遵循开放式系统结构需要,采用COTS产品与技术;系统要向综合化的方向集成,子系统功能模块化,实现系统的通用能力;系统功能模块之间的互连尽量采用机载高速统一网络技术,降低系统互连的复杂性,减小系统的重量与空间;系统功能的完成主要通过软件实现,越来越庞大的代码量需要可重用的软件设计方法。依据当前的战略发展要求和信息技术的发展方向,论文研究了军用特种飞机未来的三个发展趋势。一是面向服务技术的应用,解决作战单元之间的信息壁垒问题。二是物联网技术的不断成熟,使得军用特种飞机系统向智能化方向推进。三是全球信息栅格项目的推动,使得军用特种飞机系统成为空天一体化体系架构的支撑,因此,建立军用特种飞机战场网络也是其发展趋势之一。预测未来军用特种飞机电子系统的发展趋势能够为当前特种飞机装备的发展方向提供指导依据。
[1] Moir, I., Seabridge, A.G. and Jukes, M., 2006, Military Avionics Systems. Wiley Online Library, pp. 1-50.
[2] 熊华钢, 王中华. 先进航空电子综合技术[M]. 北京: 国防工业出版社, 2009: 1-7.
[3] 霍曼. 飞速发展的航空电子[M]. 北京:航空工业出版社, 2007.
[4] 吴志军, 杨胜学. 航空电子系统发展及展望[J].科技资讯,2014,3:33-34.
[5] 陆军, 郦能敬, 曹晨,等. 预警机系统导论(第二版)[M].北京.国防工业出版社,2011.
[6] 曹晨. 预警机发展七十年[J].中国电子科学研究院学报,2015,2(10).
[7] 甄军义. 第三代预警机及其电子侦察系统的技术特征[J].现代电子技术,2013,15(36):20-26.
[8] 黄永葵,薛秋晖,李卫民. 开放式系统结构及其标准研究[J].航空计算技术,2005,1(36):72-76.
[9] 赵杰,熊华钢,朱晓飞. 国外通用开放式结构标准的应用情况[J].航空计算技术,2011,2(41):34-41.
[10] Liu Xiaomin, Xiong Huagang, Wu Qing.Optical network for integrated modular avionics [C]. IEEE 31st Digital Avionics Systems Conference: Projecting 100 Years of Aerospace History into the Future of Avionics, DASC 2012, Williamsburg, VA, United states, 2012: 10B41-10B48.
[11] 叶海军,刘晓敏.预警机载机航电系统网络与任务系统网络差异性分析研究.中国电子科学研究院学报,2016,11(4):437-443.
[12] 彭力.物联网技术概论[M].北京航空航天大学出版社,北京,2011.
[13] 何明,陈国华,梁文军,等.军用物联网研究综述[J].指挥控制与仿真,2012,34(1):6-10.
[14] 郑澜.基于分布式机载通信系统软件架构的研究与实现[D].成都:电子科技大学,2007.
[15] 聂菊根,李德识,韩彦琰.基于物联网的网络中心战实施环境[J].火力与指挥控制,2012,37(8):14-17.
[16] 张鹏. E-2D预警机航空电子系统及其在未来网络中心战中的应用[J].电讯技术,2014,5(54):689-694.
[17] 陈强,孙超山. 基于SOA技术的战术通信服务控制技术研究[J].通信技术,2014,6(47):642-646.
