基于用户需求的停车诱导方法研究
2017-03-21郑和斌
郑和斌,莫 红
(长沙理工大学 电气与信息工程学院,长沙 410114)
基于用户需求的停车诱导方法研究
郑和斌,莫 红
(长沙理工大学 电气与信息工程学院,长沙 410114)
为了满足不同驾驶员对停车收费价格、停车场到目的地的步行距离以及社会对停车场的评价的用户需求,实现停车诱导系统与用户之间的互通,提出了一种基于用户需求的停车场选择的诱导方法,分析影响停车行为的各个因素,通过对目的地周边停车场选择,建立停车搜索模型,根据驾驶员的用户需求为其提供停车场优先决策方法,最后,利用模糊层次分析法讨论了模型的可行性。
智能交通系统;停车诱导系统;用户需求;模糊层次分析法
0 引言
随着城市经济社会的快速发展,人口数量的不断增加,机动车保有量和交通流的持续增加,私家车出行的频率不断提高引发了大量的停车需求,因此,停车诱导系统逐渐成为了国内外广大学者的研究热点。停车诱导系统[8-9](Parking Guidance and Information System,PGIS)是智能交通系统(Intelligent Transportation System, ITS)中最重要的子系统,能够提高驾驶员的停车效率,减少无用的交通流从而缓解交通堵塞,是解决城市“停车难”问题的有效途径和方法。
停车场的选择和路径诱导[10-12]是城市PGIS中的关键核心技术,然而目前国内外关于考虑驾驶员个性需求的停车场选择的停车诱导系统的理论研究仍相对较少,相应的系统还处于起步阶段。相对于国内来说,国外的停车诱导系统起步较早。1986年德国科隆市便开始操作建立了停车诱导系统,1998年,Russell G.Thompson和Anthony J.Richardson[5]提出了在城市中心建立停车搜索模型,通过对停车场负效应估计为驾驶员在市中心提供优质的车位选择,并用一个假象的城市中央商业区和参数值对模型进行了验证;E.Chaniotakis和A.J.Pel[6]结合陈述偏好实验,分析了驾驶员在不确定停车可用性和搜索时间的情况下的停车位选择,得出驾驶员在接近或者达到目的地愿意花费多少时间来搜索停车位以及影响停车行为的主要因素,并用细分的微观仿真模型和汇总的宏观交通模型的结合对实验进行了验证;Nada Milosavljevic和Jelena Simicevic[7]用RP和SP调查的方法分析了停车收费价格调整对停车需求和停车时间的影响的问题。在国内,北京邮电大学颉靖[1]提出了一种基于物联网技术的城市停车诱导系统,利用蚁群算法寻找最优车位;东南大学陈峻[2]等人提出了三目标(最方便、可达性最好、停车成本最低)停车场选择模型,使用启发式遗传算法(genetic algorithm,GA) 求解近似最优解;季彦婕[3]等人提出了服务于出行前停车诱导系统的两阶段停车选择方法,并利用加权求和法求解近似最优解;肖婧[4]等提出了一种综合用户出行前静态的和行进中动态的高维多目标的停车场选择及路径诱导的模型,并用高维多目标优化算法 KS-MODE进行了高效求解。
本文在考虑停车后步行距离、停车费用、停车场评价等多方面停车用户需求,提出了一种计及用户需求的停车诱导方法。该方法根据用户的需求为驾驶者选择目的地周围合适的停车场,并提供行车路线,解决驾驶者的停车问题。
本文安排如下,第二节介绍本文所涉及的相关术语和概念,第三节给出停车搜索过程,第四节分析影响驾驶员停车选择行为的因素,建立基于驾驶员个性化停车选择行为模型,第五节讨论模型的可行性,第六节为本文小结。
1 介绍
设U为论域,一个模糊集合定义为A:
U→I,这里I=[0,1],如∀u∈U,存在a∈I,使得A(u)=a,则称A为一个定义在U上的模糊集合,A(u)为u对A的隶属度[]。
设论域R上的模糊数M,如果M的隶属度函数μM:R→[0,1]表示为:
式中,l≤m≤r,l和r表示M的下界和上界值。m为M的隶属度为1的中值。一般三角模糊数M表示为(l,m,r)。
层次分析法(AHP)是将与决策有关的元素分解成目标、准则、方案等层次,在此基础上进行定性和定量分析的决策方法,其步骤:
1)建立递阶层次结构;
2)构造两两比较判断矩阵;
3)针对某个标准,计算各备选元素的权重。
设a=(al,am,ar),b=(bl,bm,br),则称:
为a≥b的可能度,其中λ∈[0,1](下同)。类似地,称:
为b≥a的可能度[18]。
模糊层次分析法[13](Fuzzy AHP)是模糊数和层次分析法的结合,其基本思想是根据多目标评价问题的性质和总目标,把问题本身按层次进行分解,构成一个由下而上的梯阶层次结;与层次分析法的区别为:
1)建立的判断矩阵不同:在AHP中是通过元素的两两比较建立判断一致矩阵;而在FAHP中通过元素两两比较建立模糊一致判断矩阵。
2)矩阵中各元素的权重不同。
定义1:M1(l1,m1,r1)和M2(l2,m2,r2)是三角模糊数。M1≥M2的可能度用三角模糊函数定义为:
定义2:一个模糊数大于其他k个模糊数的可能度,被定义为:
2 停车搜索过程
停车选择[14-16]可以被看作是一个驾驶员基于日常经验在不断获取更新信息的情况下做出一些相关决定的搜索过程。这个过程由驾驶员的一系列决定和停车场的实时状态组成,如图1所示。驾驶员在目的地附近寻找停车位时,按顺序检查各个停车场的状态,根据驾驶员的个人需求逐个排查符合要求的停车场,当一个停车场被检查后并较符合驾驶员的个性需求,驾驶员可以选择接受它,或者继续搜索下一个符合要求的停车场。搜索过程一旦开始,对停车场检测和评估同时进行。接受当前的停车场将终止搜索,反之,继续搜索。停车之后,系统回到初始位置,等待下一次搜索。
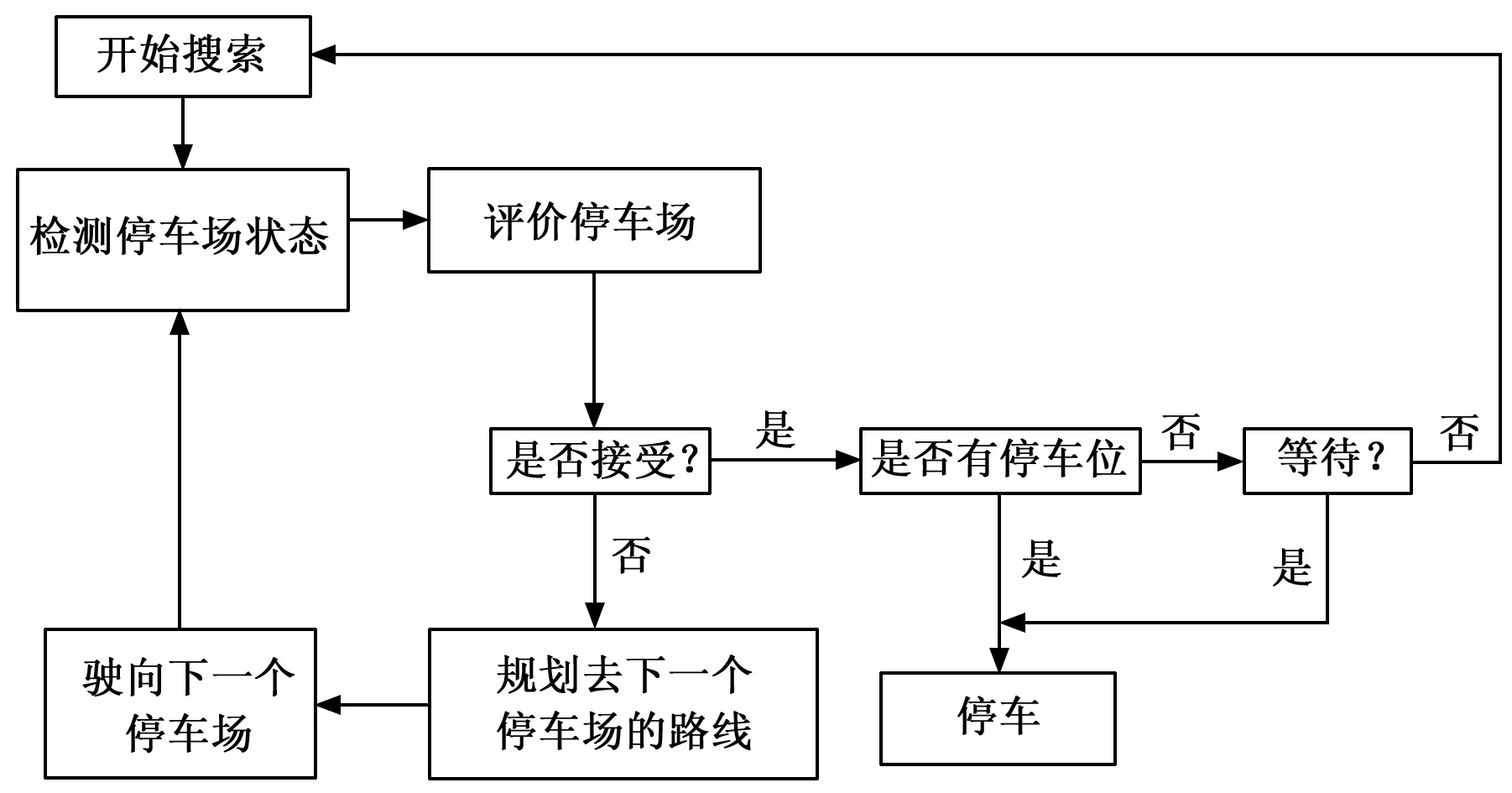
图1 停车搜索过程
对停车场的检查,确定其属性(是否营业),并且确定是否有停车空间。查看停车场的评价,包括停车场的安全性、存取车是否方便、服务质量是否良好、停车场出入口条件是否良好等,完成这些任务后,根据驾驶员的个性需求选择符合要求的停车场。
被选中的停车场目前还没有一个可用的停车空间是有可能的。在这种情况下,驾驶员必须要等待一个停车空间。等待的时间取决于停车场的周转率,周转率越高,停车场服务的车辆就越多,等待时间就越短;反之,等待时间越长,这也能反映停车场的服务能力。
3 停车选择行为模型
3.1 分析影响停车选择行为的因素
停车行为是指出行者驾车从出发地到目的地附近寻找并选择停车场过程中的个体行为,如图2所示,受相关因素的影响,如停车后的步行距离、停车场的收费标准、停车场的安全性、存取车是否方便、服务质量、停车场的出入口条件(进出停车场的等待时间)等,表1是248份调查问卷中志愿者对驾驶员停车行为特征调查结果的显示,可以看出驾驶员选择停车场最关注的因素是停车场离目的地的步行距离(31.4%)、收费合理(30.8%)、安全性好(10.8%)、存取车方便(10.2%)、服务质量好(7.2%)、停车场出入口条件好(5.2%)等。

表1 驾驶员选择停车场的主要考虑因素
1)步行距离对停车行为的影响:由表1可知停车场与目的地之间的步行距离是驾驶员选择停车场时考虑的第一因素,步行距离越短,驾驶员前往停车的可能性越大。从步行时间的调查数据显示,28%的停车者可以接受5分钟以内的步行时间,44%的停车者可以接受5~10分钟的步行时间、仅有6%的停车者接受20分钟以上的步行时间,如表2所示。可见,合理的服务半径(停车场到目的地的距离)是决定了停车场的服务对象和数量,也是驾驶员优先考虑的因素。国外相关的文献[7]调查表明,驾驶员宁愿用步行距离交换停车费用,即愿意将车辆停放在距离较近费用较高的停车场。

表2 停车后到目的地的步行时间
2)停车费用对停车行为的影响:停车收费价格的增加会在一定程度上降低停车需求,收费价格过高,可能超过了驾驶员对价格的承受力,他们就会将车辆停放在离目的地较远的停车场。对时间和价格的权重进行比较,时间权重大于价格时,那么就不会考虑停车价格的问题,而是会选择距离目的地近的停车场。文献[7]的研究表明,上涨50%的停车收费价格会减少15%的停车需求和缩短16.5%停车时间,可见,停车费用在一定程度上可以影响停车需求和减少停车时间,也是驾驶员选择停车场时考虑的重要因素。
3)停车场评价对停车行为的影响:停车场的评价包括停车场的安全性、存取车是否方便、服务质量是否良好、停车场出入口条件是否良好等,停车场的安全性是指车辆停放在场内是否会被盗、被划等;存取车是否方便是指停车场内部结构是否复杂,车辆转弯、掉头能否顺利进行,这与停车场的设施类型、车位、通道等设计因素有关;停车的服务质量包括服务人员的服务态度及其他附属服务;停车场的出入口的驾驶条件是指车辆进出停车场的难易程度,驾驶员能否顺利、安全的进出停车场,决定驾驶员进出停车场的等待时间,这些都是驾驶员较为关注的因素。
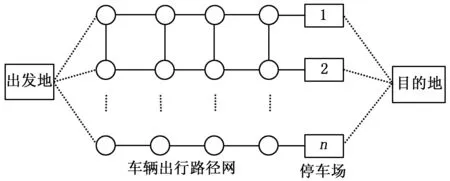
图2 停车行为选择过程图
从微观经济学的角度来说,驾驶员通常会选择效用值最大的停车场停车,这些效用与停车的费用、消耗的时间、受到服务的质量等因素相关。因此,选择停车场离目的地的步行距离、收费、安全性、存取车是否方便、服务质量、停车场出入口条件等作为影响停车行为的主要影响因素,分析驾驶员的停车选择行为。
3.2 建立停车选择行为的广义效用函数
根据效用原理,驾驶员会优先选择效用值最大的停车场进行停车。而这些效用与停车后的步行距离S、停车费用C、停车场的评价E、其他因素O有关。所以,建立如下的停车场的广义效用函数:
式中:Vkj是第k个驾驶员选择第j个停车场的广义效用函数;S是停车场到目的的步行距离;C是根据停车时间停车场收取的停车费用;O是其他因素影响停车行为的效用;ε是驾驶员从出发地到目的地的随机效用;α、β、γ、μ均为广义效用参数。
随机效用是由驾驶员的停车选择行为产生的,包括:(驾驶员停车选择的随机性,即驾驶员自身估计确定性效用所产生的偏差;(系统产生的随机效用,即由于驾驶员的停车选择行为受到其他驾驶员对停车场评价的影响所产生。通常,能够获取更多、更实时的停车信息的驾驶员的随机误差要小于得不到停车信息的驾驶员的随机误差。
3.3 停车选择模型的建立
驾驶员的选择行为多种多样,但是总希望选择符合要求的最佳(效用最大)的停车场进行停车。通常停车场服务质量好、停车方便、距离目的地近且停车费用低的停车场更受驾驶员欢迎。驾驶员是否会选择某停车场也与这些因素有关。非集计方法中的Logit模型已被证明在描述交通选择效用中的合理性,构建如下模型:
式中,Pkj是第k个驾驶员选择第j个停车场的概率;Vkj是第k个驾驶员选择第j个停车场的广义效用函数,j∈An;An是第k个驾驶员选择符合要求停车场的集合。
4 分析验证
4.1 评价指标体系的建立
通过观察停车选择模型特征,采用模糊层次分析法分析该模型的可行性。多数情况下,驾驶员总是希望找到步行距离短停车场评价高且停车费用低的停车场进行停车,本文就以这种情况分析停车选择模型的可行性。本文运用模糊层次分析法对其他4个指标因素建立诱导停车产生停车场广义效用的评价目标层、评价因素指标层、评价对象层,如图3所示。

图3 停车场广义效用评价层次图
4.2 构建模糊判断矩阵
根据总目标的要求,由三位用户对评价层的各个指标进行比较得到评价准则的模糊评价矩阵,见表3。
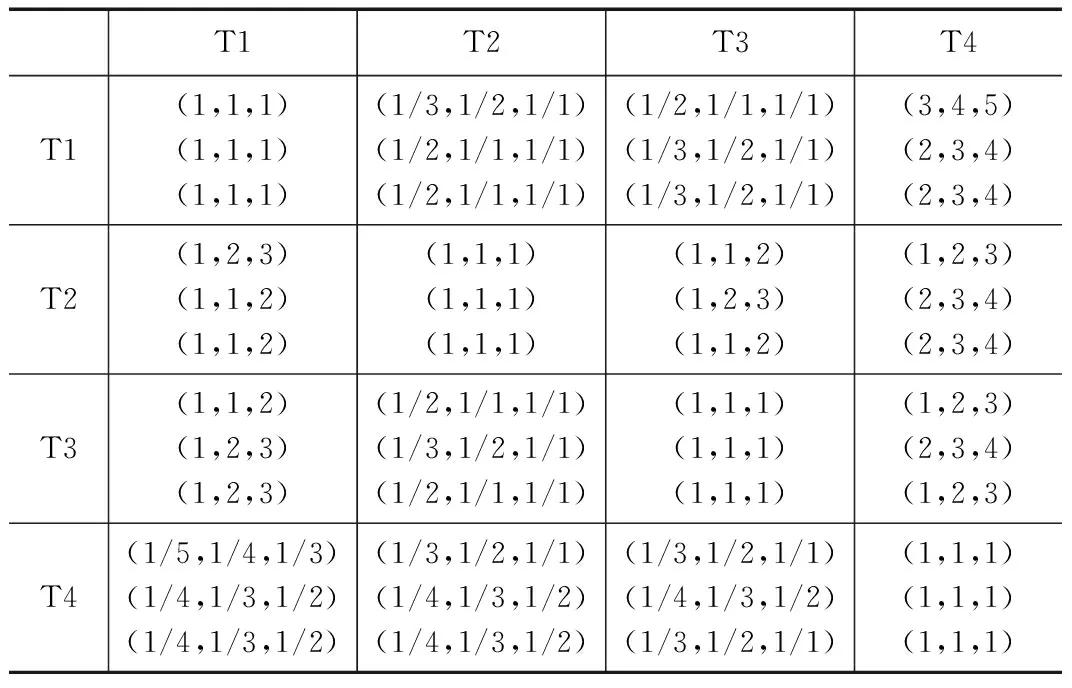
表3 T1~T4对总目标的模糊评价矩阵

T1比T2的值为:(0.44,0.83,1.00),对其他比值做相似的处理,得到模糊判断矩阵,如表4。
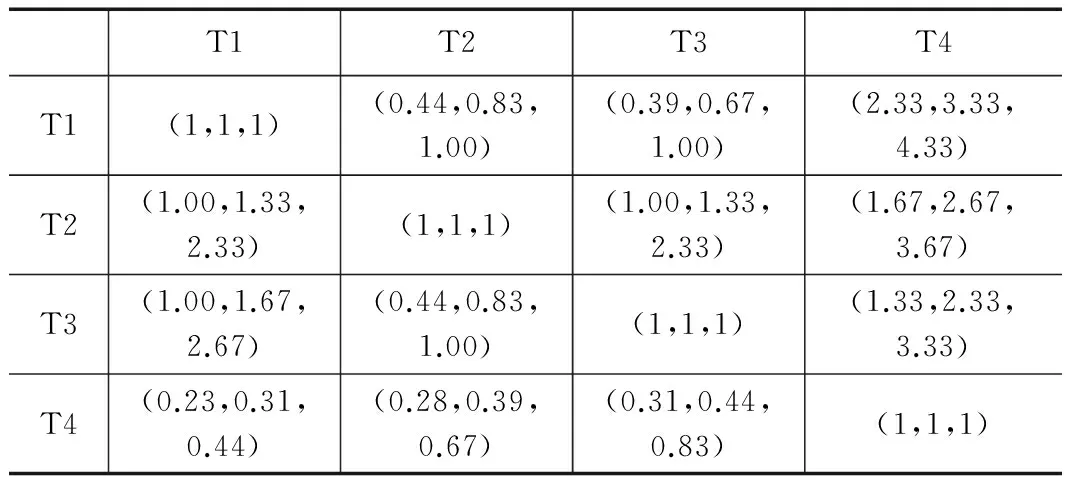
表4 T1~T4对总目标的模糊判断矩阵(FCM1)
4.3 计算确定各指标权重
根据FCM1,计算T1的初始权重:
(1,1,1)=(14.42,20.13,27.60)
(2.33,3.33,4.33)=(4.16,5.83,7.33)
同理,可以计算出T2,T3,T4的初始权重:
ST2=(0.1692,0.3145,0.6470)
ST3=(0.1366,0.2896,0.5548)
ST4=(0.0659,0.1063,0.2039)
2)去模糊化并求出T1至T4的最终权重:
根据定义一和定义二对ST1,ST2,ST3,ST4进行去模糊化:
d(T1)=
minV(ST1≥ST2,ST3,ST4)=min(0.9316,1,1)=0.9316
同理,可得:
min(1,0.9393,1)=0.9393
min(0.2249,0.1429,0.2686)=0.1429
将以上权重值标准化,得到各指标的最终权重:
(wT1,wT2,wT3,wT4)=(0.3091,0.3318,0.3117,0.0474)
因此,便得到指标T1~T4的权重,见表5。

表5 停车场广义效用各指标的权重
根据以上计算结果可以看出各指标的权重和调查所得的数据结果基本一致,(步行距离31.4%,停车场费用30.8%,停车场评价33.4%,其他因素4.4%),因此,该模型可行。
5 结论与展望
本文基于对影响驾驶员停车选择行为的分析,根据驾驶员用户需求给出了停车选择模型。模型中考虑了车辆停放后驾驶员的步行距离、停车场的收费标准、停车场的评价(安全性、停车场结构、服务质量等)等影响停车选择的因素,结合相关的调查数据对模型参数进行了标定,最后通过模糊层次分析法(Fuzzy AHP)计算验证模型的可行性。同时,本模型有很强的可扩展性,能够根据需求动态地改变各种参数,从而使得该模型具有较强的适用性。
不足之处及今后的工作:本文调查的数据不够全面,今后可以根据不同工薪阶层、年龄阶层、性别,对驾驶员到某市中心商业区周边选择停车场进行停车行为的调查,综合分析调查来的数据进行仿真分析,完善本模型。
[1] 颉 靖.基于物联网技术的城市停车诱导系统研究[D].北京: 北京邮电大学,2011.
[2] 陈 峻,周智勇,王 炜.城市机动车辆停放选择模型[J].交通运输工程学报,2006,6(2):75-79.
[3] 季彦婕,王 炜,邓 卫. 出行前停车诱导系统中两阶段停车选择方法[J].武汉理工大学学报,2008,32(6):979-982.
[4] 肖 婧,王 皓. 高维多目标动态停车场选择及路径诱导研究[J]. 计算机应用研究,2015,07:2009-2013,2026.
[5] Russell G. Thompson, A parking search model[J]. Transportation Research Part A 1998,32(3):159-170.
[6] Emmanouil Chaniotakis,Adam J. Pel. Drivers’ parking location choice under uncertain parking availability and search times: A stated preference experiment[J].Transportation Research Part A 82,2015:228-239.
[7] Nada Milosavljevic, Jelena Simicevic. Users response to parking policy change: A comparison of stated and revealed preference date[J]. Transport Policy,2016:40-45.
[8] 赵 娜,袁家斌,徐 晗. 智能交通系统综述[J]. 计算机科学,2014,11:7-11,45.
[9] Masaki I. A Brief History of ITS[M]. Masachusetts Institute of Technology,1999.
[10] 关宏志,刘兰辉,廖明军. 停车诱导系统的规划设计方法初探[J]. 公路交通科技,2003(1):136-139.
[11] 张宝玉,晏克非,周湘霆. 停车诱导系统中筛选停车场(库)方法的研究[J]. 计算机工程与应用,2007(27):237-239,242.
[12] 张 华. 国内外停车诱导系统对比分析及启示——以科隆市和上海市为例[J]. 规划师,2008(S1):23-25.
[13] 兰继斌,徐 扬,霍良安,等. 模糊层次分析法权重研究[J]. 系统工程理论与实践,2006(9):107-112.
[14] 梅振宇,项贻强,陈 峻,等. 基于停车选择行为的路内停车价格优化模型[J]. 交通运输系统工程与信息,2010(1):99-104.
[15] 云美萍,龙科军,劳云腾,等. 考虑停车选择概率的公共停车场规模优化模型[J]. 系统工程,2008(2):84-88.
[16] Fabien Prevost.Curb parking:theory and model[M]. Institute of Transportation Studies, University of California,Berkeley, 1978: 72-76.
[17] 莫 红,王 涛. 广义区间二型模糊集合的词计算[J]. 自动化学报,2012(5):707-715.
[18] 徐泽水. 三角模糊数互补判断矩阵的一种排序方法[J]. 模糊系统与数学,2002(1):47-50.
Research on Parking Guidance Ways Based on User Demand
Zheng Hebin, Mo Hong
(Changsha University of Science and Technology, Changsha 410114,China)
In order to meet the different drivers of parking fees, parking lot to the destination of the walking distance and social evaluation on the parking lot of the needs of users, achieve parking guidance and inter-working between the user and the system, this paper presents a choice method based on users demand for parking lot by induction and analysis of all the factors that influence the parking behavior, through to destinations around the parking lot choice and establish the parking search model, according to the driver′s personal preference to provide parking field priority decision method. Finally, the fuzzy hierarchy analysis method to discuss the feasibility of the model.
intelligent transportation system; parking guidance and information system; individual needs; fuzzy AHP
2016-04-07;
2016-06-21。
国家自然科学基金(61073048)。
郑和斌(1991-),男,湖南省长沙市人,硕士研究生,主要从事智能交通、分析与控制方向的研究。
莫 红(1972-),男,湖南省长沙市人,副教授,硕士研究生导师,主要从事复杂系统的建模、分析与控制,人工智能方向的研究。
1671-4598(2017)02-0170-04
10.16526/j.cnki.11-4762/tp.2017.02.047
TP1
A
