基于图像挖掘技术的车辆目标识别方法
2017-03-21赵燕萍
赵燕萍
(太原工业学院 计算机工程系,太原 030008)
基于图像挖掘技术的车辆目标识别方法
赵燕萍
(太原工业学院 计算机工程系,太原 030008)
在目前的图像处理技术发展现状中,图像挖掘技术是其中一项较为突出和新颖的技术分支;而随着日益庞大的图像数据信息处理量的要求增加,却没有一个有效的分析和处理技术,为此,如何解决大量数据的解析和处理问题是目前图像挖掘技术的主要方向,首先研究图像挖掘技术的原理和其在目前社会中的应用情况,利用简析图像挖掘技术的基本原理分析其数据模型,探讨其所具备的基本功能以及在车辆目标识别上的应用和方法;总结出图像挖掘技术对图像中所存在信息的完全解读,挖掘图像中存在的隐形关联,而且随着图像挖掘技术的不断改进,其目标识别的功能可以应用到车辆管理模式当中;通过实验表明,此方法可以对目标图像中车辆数量和种类的辨识度达到80%以上。
图像处理技术;图像挖掘技术;车辆目标识别;数据模型
0 引言
近些年,随着科学技术的不断发展,计算机技术和网络技术的产生为接下来的数字图像处理技术提供了发展的土壤。而且随着数码相机、监控系统以及遥感技术在我们日常生活和社会活动中的不断应用,产生了大量的图片数据资源,这也为图像处理技术的发展和应用提供了很大的需求。“人们迫切需要能够快速、准确地从浩如烟海的数据库中发现隐藏的有用知识信息,从而提供重要的、未知的知识和资源,来指导决策,创造更大的效益,在这样的需求驱动下,数据挖掘技术得以产生[1]。”通过以上的阐述,图像挖掘技术可以总结为将大量的图像数据资源中较为隐形和潜在的信息进行提取和挖掘行为。所产生的表现形式则为“概念(Concepts)、规则(Rules)、规律(Regularities)、模式(Patterns)”[2]。其挖掘的内容则为信号和图像,而图像的挖掘工作是其所具备的主要功能。
而在目前的车辆管理模式当中,车辆目标识别是其最基本也是最重要的环节之一。在进行车辆管理工作当中,无论道路监控设备还是个体单位的车辆监控系统,都会产生大量的图像数据资源,为此,本文通过研究图像挖掘技术的相关功能,结合目前车辆管理中的车辆目标识别方法进行整合研究[3]。在此基础上设计出的车辆识别方法的可实用性和应用程度。
1 图像挖掘技术的概念及数据模型
1.1 图像挖掘技术的概念
图像挖掘技术是基于现今的图像处理技术而得以发展和应用的,其是图像处理技术中的一个子方面,也是较为现今和创新性的技术之一,其是整合数据处理模式的基本原理结合图像所产生的新型技术。面对社会生产生活中不断增多的数据流量,大量的图像数据处理很难实现更为详细和挖掘隐形信息的功能,为此,图像挖掘技术在此前提下被开发出来[4]。总结来说,图像挖掘技术就是在大数据库当中提取图像数据,并且进行隐形关系分析和潜在信息资源的发现和提取。其整合了计算机中的图像处理及检索功能,增加了数据挖掘和模式识别能力。图像挖掘技术是一个产出于图像处理技术而又结合多种技术的交叉技术设计。而目前的图像挖掘技术发展现状还不够完善和成熟,一些辅助和相关技术的应用也不够彻底,还面临着一些待开发的方面。例如,在图像模式的表示上如何将所有信息统一表示在图像特征的机制当中;怎样有效地做到图像检索和分析工作,稳定高速地传输至图像大数据库当中;图像模式的可视化完善发展,面对隐形和暧昧的信息资源进行适当的分析和解读。
现有的图像挖掘技术有: Simon 大学开发的Multi ediaMiner可以进行图像集相关规则的挖掘; Mihai Dateu和Klau Sseidel开发了一个智能卫星挖掘系统; Mic haelC.Burletal用图像挖掘技术对NASA目标进行分析, 获取信息; M ihai Datcuetal用贝叶斯方法进行信息聚合和图像数据挖掘; Miehaele Burletal在文献中讨论了图像数据挖掘的分布式结构;讨论了用图像挖掘技术进行语义特征的抽取, 进行图像检索的新方法。我们可以看到, 人们对图像挖掘研究的问题主要在于挖掘系统的建立和挖掘算法的发现。
1.2 数据模型
在图像挖掘技术当中,挖掘技术的应用模型主要分为两种:第一种功能驱动模型;第二种信息驱动模型。
1.2.1 功能驱动模型
在功能驱动模型中,其主要是依照设计好的或者是特殊情况下的要求来进行具体的图像挖掘技术来进行框架构造[5]。其中,MultiMediaMiner就是功能驱动模型模式下构造起来的图像挖掘技术,它是以DBMiner和C-BIRD这两种系统作为开发的基础,它也是目前最为典型的功能驱动模型。其所组成的部分则有图像采集器、预处理器、检索引擎、知识发现模块这4种基本功能模块。其中,图像采集器(excavator)的工作是将储存在图像大数据库当中的图文数据进行提取。接着利用预处理器(Preprocessor)将所收集到的图文数据进行特征的分析和提取工作,并且将所得到的结果另外储存在特征数据库当中。上述可以分类为准备模块,在上述工作完成后用户可以利用检索引擎(search engine)通过分类好的特征进行相应的匹配查询和提取到用户界面。最后利用用户端的软件系统采用知识发现模块(discovery modules)对搜索到的图文数据进行特征描述、分类工作,利用关联规则和聚类原则进行挖掘和解读。图1显示图像挖掘技术中的功能驱动模型的结构模式。

图1 图像挖掘技术中的功能驱动模型结构图
1.2.2 信息驱动模型
图像挖掘技术当中的信息驱动最早被提出是以图像原始信息为主体,以此之上来利用图像基本处理功能为基础和图像原始内容为蓝本进行图像挖掘的结构架设。其特别注重图像信息中存在的层次关系和其所产生的不同相互作用。而这种模型架构在进行图像挖掘过程中采用底层和高层分段处理的方式。在底层先利用原图像中所具备的原始信息特征所显现出来的对象及区域信息,进行聚类算法和领域知识图像分割,将整体图像的信息特征进行初步分类,设定出有意义和值得进行挖掘的信息区域。接下来在进行高层次的解读和挖掘工作,对所分析的图像数据进行更为详细的挖掘和分析隐形关系及潜在信息。在信息驱动模型构造中可以细分为像素层、对象层、语义概念层、模式知识层这四个结构模式层次[6]。而结构使用方式则是从像素曾到模式知识层递进进行,已完成此结构的工作。首先,在像素层进行原始图像信息的和基本特征的分类,其中分类标准则根据所组成的素点、纹理、形状、色彩等因素条件。接着利用分类出来的原始图像基本特征通过对象层解读出其中的特征和区域信息。以上两层则处于底层次方面。接着利用语言概念层将分类解读出来的信息重新进行语言整合,生成出高层次语言概念以进行高层次的图像挖掘。模式知识层作为最后环节利用网络中大数据库中所储存的各种知识概念和语言模式对收集来的新语义进行对比解读,通过对比分类将图像中所存在的隐形关系和潜在信息分类到相关的知识库中,以此完成深层次的图像挖掘工作。而且这种模式具备很强的灵活性,可以适时扩展,将挖掘工作同步到任何层次内进行,以做到更高效率和准确性。
2 图像挖掘技术与车辆目标识别应用
在进行车辆数量和种类目标识别过程中,将利用到图像挖掘技术中的图层分离、灰度增强、阙值调整,使得图像可以经过处理挖掘出图像中的基本信息和隐形信息,做到对车辆目标识别的任务。
2.1 图层分离
因为路面汽车图像由于反光程度不同出现深色车和浅色车两种情况,而小型车由于外形设计将反射光源分散,图像收集器将其显示为深色车,而大型车则显示为浅色车。为了对车辆和路面进行图像分析,采用图像挖掘技术中的腐蚀和膨胀手段进行计算,对图像内部进行色彩削弱,分类出两种图像,分表显示大型车和小型车,这些工作都属于图像挖掘技术当中信息驱动模型中的底层工作[7]。
图层分离公式如下:
式中,A为原始遥感图像;A0为深色车辆所现实的图层;A1是浅色车辆所显示的图层;Amax为直方图中所显现出来的像素点最多的灰度等级。
2.2 灰度增强
进行图层分离工作之后,由于图像中色彩不鲜明,多余色彩数值过多,导致在进行识别过程中无法准确的找出需要的车辆识别目标,为此进行提高灰度值,使整体图像处在黑、灰、白像素范围之内,形成数量较少的色彩分布,以达到对特定目标的识别。
利用灰度的线性变化,使得各个图像中的图层灰度值增加到[0.255]之间。其中,利用的变化公式如下:
其中:[a,b]为在进行调整前的像素灰度值范围;g(x,y)是在进行调整后所产生的固定灰度值。
2.3 阙值分割
而阙值分割的作用也是为了保证灰度值可以处在一个较为适合的范围之内。具体操作是先利用预处理手段进行图像内部前景色和背景色进行分割,然而,进行多类分割会产生一定的不准确情况发生[8-9]。由于在进行分类分割时,分割其中一种颜色的时候会出现阙值差距拉大,系统会自动降低阙值的大小以求平衡,致使其他两类实验体所产生的像素差异和亮度变小,很难分辨出另外两种的差异性。为此将采用固定阙值,将各实验体的阙值数量设定便可对每一个实验体进行检测和识别,获得相应的数据。
最后采用最大类间方差的方法进行灰度属性分类,将背景和实验体进行分离,这其中出现的方差值越大,分离效果越好,得到的视觉效果也越明显。而进行类间方差要进行一下公式计算[10]:
设实验中图像的灰度等级为0,1,2,…,L-1;灰度等级为i,像素点的个数设为mi。利用公式计算整体的像素点数:

利用阙值分类中阙值数值t将所有的像素区分,形成C0=(0,1,2…,t)以及C1=(t+1,t+2,…,L-1)。其中这两种类别的可能出现的概率可以利用公式计算得出:
两种类别的平均灰度计算公式:
利用以上公式计算可以获得相应的阙值和类间方差的数值,以此分析的计算得出最佳的阙值数量,以此数量调整最为合适图像灰度值,获得更为清晰的图像信息。
3 实验与结论
本文进行对于道路行驶中车辆数量以及种类的车辆目标识别实验。其主要是通过利用遥感技术拍摄到的俯拍道路车辆图像,如图2所示。

图2 拍摄的道路车辆行驶原始图像
由图2可知,先进行图层分离工作,由于图像中大型车和小型车对于光线反射情况不同形成车浅色车和深色车分别,为此,利用图像分离的办法将整体图层分解成为两个图层,分别显示小型车和大型车。图3为分离后小型车显示图层,图4为大型车显示图层。

图3 分离后小型车图层

图4 分离后大型车图层
由图3可知,在进行图层分离后可以清楚分辨此当路上的当前时段车辆种类的大致情况,但是图像由于色彩繁多以及道路色彩不鲜明,对于具体数量的分别尚不清楚,还需要进行下一步实验。
第二步进行灰度值调节,将车辆的色彩和路面色彩进行分离。通过底层处理保证深色车、路面、浅色车在图像分类中各处于黑、灰、白三个灰度区间内。并且通得到数据制作出分布直方图,如图5所示。通过数据显示出两种车辆的像素点分别处于路面像素点峰值的两侧并且存在一定程度上的交叉。

图5 像素个数随灰度值变化情况
在进行各图层的灰度值调节得到的数据显示,在道路中车辆与车辆间的数量差异得到更加明确的表示,利用不同车型和路面灰度值不同分辨出个体间差异。而在图像中对于车辆和路面色彩的分别仍较不完善。还需要对灰度值进行更加深层次的调节以求画面更加直观和数据完整。
第三步在灰度值调整的基础上利用阙值计算,保证更加完善的和适合的灰度数值。利用以上公式配合实际图层的色彩分布计算出相应的灰度范围,并将得到数据分类绘制直方图。图6,图7显示在进行加深调整后大型车和小型车与地面灰度值关系图。
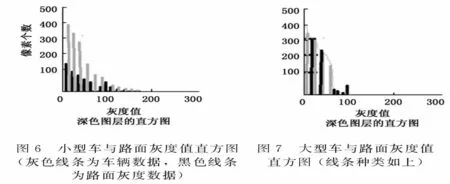
因此,利用以上方法原图像进行的初步挖掘可以清晰地得出其图像中的基本特征,并且利用分布直方图中直观地表示出来。其主要的表现呈现出各自的像素点集中在高和低两个灰度范围之内。利用了这种特性和灰度值的显示可以很清楚的在图像中分辨出汽车的不同以及路面的情况。
第四步,将最后阙值计算得来的灰度数值进行类间方差计算,得出灰度值的最大最小及平均值,利用公式算出最佳的灰度范围。本文实验结果显示最佳灰度值处于[0.255]之间的时候,图像显示最为明确,图中基本信息显示完整,整个准确率达到识别标准。通过实验后得出处理完整图像为图8。
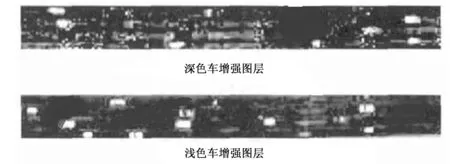
图8 进行实验后得到的结果图像
由图8可知,将实验调整后的图像进行重叠观察,得出道路上车辆种类和数量信息。最后将实验得到的数据利用语义逻辑编辑传输到上层挖掘结构当中,利用大数据库中的信息和数据进行比对,做最后的深层次分析。实验结果表明,对于小型车辨识度可以达到80%,而对于大型车辨识度可以达到85%。而车辆与路面色彩分离程度可以达到辨识度95%,通过不同步骤下辨识程度制成表格表1。可以清楚的分辨车辆间的数量关系和种类,达到分辨路面车辆目标识别的目的。

表1 不同试验阶段对于车辆型号和路面辨识度对比 %
4 结论
本文研究在目前的技术环境下和目前的社会需求中应用图像挖掘技术的重要性。利用分析其基本原理和概要结合其主要作用和社会意义突出在未来的发展中,面对大数据分析和处理
时代,图像挖掘技术是目前最为可行的办法之一。并且利用图像挖掘技术分析目前道路车辆目标识别情况,通过图层分离、灰度调整、阙值设定等一系列办法进行初期的图像识别和挖掘工作。可以很好地做到对道路行驶车辆情况做到识别任务。
经过试验表明,图像挖掘技术在目前车辆目标识别应用上有很强的发展可能,并且仍具备开发新方向的潜力。
[1] 刘玉红,谢正祥.图像挖掘技术及医学应用[J].中国医学物理学杂志,2010,10(1):1610-1615.
[2] 王洪元,史国栋,符彦惟,等.数据挖掘技术在故障诊断中的应用[J].江苏石油化工学院学报,2001,13(4):42-44.
[3] 曹天扬,申 莉.基于交通遥感图像处理的车辆目标识别方法[J].计算机测量与控制,2014,22(1):222-224.
[4] 李开明,张 群,罗 迎,等.地面车辆目标识别研究综述[J].电子学报,2014,10(3):538-546.
[5] 曹天扬, 申 莉. 基于交通遥感图像处理的车辆目标识别方法[J]. 计算机测量与控制, 2014,22(1):222-232.
[6] 曲文龙,李卫东,杨炳儒.地图像挖掘技术研究[J].计算机工程与应用,2004,3(23):256-263.
[7] 凤祥云, 卢辉斌. 基于数据挖掘的水下激光图像识别技术[J]. 激光杂志, 2016,6(1):55-58.
[8] 李新友. 图像数据挖掘的预处理技术[J]. 河北旅游职业学院学报, 2015,4(3):101-106.
[9] 崔巨勇. 智能变电站信息一体化平台数据挖掘技术研究[D]. 沈阳:沈阳工业大学, 2015.
[10] 刘利钊, 洪江水, 刘莉莉,等.面向大数据图像处理的尺度空间挖掘算法及应用[J].上海交通大学学报, 2015, 19(11):1731-1735.
Vehicle Target Recognition Method Based on Image Mining Technology
Zhao Yanping
(Department of Computer Engineering,Taiyuan Institute of Technology,Taiyuan 030008,China)
In the current development of image processing technology, image mining technology is one of the more prominent and innovative technology branch. With the increasingly large amount of image data processing requirements increase, there is no effective analysis and processing technology, so how to solve the problem of a large number of data analysis and processing is the main direction of the current image mining technology. This paper will focus on the principle of image mining technology and its application in the current society. Based on the analysis of the basic principle of image mining technology, the data model is analyzed, and the basic function of the data model is discussed. Summed up the image mining technology can fully interpret the existing image information, mining association contact in image, and with the improvement of image mining technology, the target recognition function can be applied to vehicle management mode. Experiments show that this method can achieve more than 80% of the number of vehicles and the number of vehicles in the target image.
image processing technology; image mining technology; vehicle target recognition; data model
2016-11-28;
2016-12-20。
赵燕萍(1977-),女,山西汾阳人,硕士研究生,副教授,主要从事计算机应用、智能信息处理方向的研究。
1671-4598(2017)02-0160-04
10.16526/j.cnki.11-4762/tp.2017.02.044
TP311
A
