分布式无线地震数据采集同步技术研究
2017-03-21荣文钲吕中云
荣文钲,沈 统,吕中云,江 山,郭 磊
(1.西南科技大学 核废物与环境保护国防重点学科实验室, 四川 绵阳 621010; 2.成都理工大学 地质灾害防治与地质环境保护国家重点实验室, 成都 610059)
分布式无线地震数据采集同步技术研究
荣文钲1,2,沈 统1,2,吕中云1,2,江 山1,2,郭 磊1,2
(1.西南科技大学 核废物与环境保护国防重点学科实验室, 四川 绵阳 621010; 2.成都理工大学 地质灾害防治与地质环境保护国家重点实验室, 成都 610059)
针对目前分布式无线地震数据采集中由于采集节点增多、无线传输延时等因素导致的各采集节点间数据采集同步精度不高的问题,研究并设计了一种针对分布式无线数据同步采集中各个节点同步授时以及对采集数据包进行精确时间标记的方案;采用GPS(Global Positioning System)授时技术对各个采集节点时钟进行授时,同时利用GPS精准的秒脉冲对本地压控晶振器频率误差进行实时修正;采用在地震采集数据包中加入精确的时间戳信息的方法,保证了各个节点间同步误差限制在0.1 μs以内;即使在GPS失效的情况下,压控晶振器和计数器联合作用仍可保证各节点同步采集稳定工作6小时。
分布式地震数据采集;GPS时钟授时;压控晶振;采集同步;精确时间戳
0 引言
在分布式无线地震数据采集系统中,各个采集节点通过无线的方式与采集中心主节点进行通信,由主节点控制各个采集节点的数据采集与传输。为了保证采集中心与各个采集节点信息交互的实时性,系统中各个采集节点的时钟需要保持高度同步[1-2]。分布式地震数据系统中,各个采集节点位置较为分散,每个节点拥有自身的独立实时时钟。由于各个采集节点间由于自身实时时钟晶体振荡器的精度与稳定度差异,各个节点间时钟存在较大的偏差,此时就需要对各个节点的时钟进行同步,保证各个采集节点间通信及数据传输的实时性[3-6]。
在目前的分布式系统中,时间同步主要分为软件时间同步及硬件时间同步两种,软件同步方式已经有许多较为成熟的时间同步方法,例如网络时间协议(NTP-Network Time Protocol)、简单网络时间协议(SNTP-Simple Network Time Protocol)、PTP时钟同步协议(Precision Time Protocol)等。其中前两种同步方式在因特网中已经得到广泛的应用,其同步精度可以达到毫秒级,最后的PTP时钟同步协议主要利用各个节点通过发送报文的方式进行时间延时测量与补偿,在低负载的网络环境中理论同步精度可以达到亚微秒级,但是存在信道不对称、网络组件及协议堆栈延迟、时钟晶体振荡器的漂移及稳定性差异等都会影响其时钟同步精度[5-8]。
随着GPS授时技术的不断发展,其接收机的成本不断降低,GPS授时技术逐渐应用到地震数据采集节点的授时中。其不同接收机之间的1 PPS脉冲信号同步性有效控制在30 ns以内,因此利用其时间码的输出以及高精度的1 PPS信号对分布式无线地震数据采集中各个节点的本地时钟进行同步授时,使得各个节点之间的时间可以达到更好的同步精度,同时也省去了网络软件同步方式繁琐的延时估算与补偿[9-10]。
本文主要针对基于GPS授时技术在分布式无线地震数据采集中的节点时间同步方式展开研究,首先对分布式地震数据采集系统工作流程进行简要的介绍,然后介绍了GPS授时技术的原理以及对实现GPS授时的方式进行了详细介绍,同时针对提出了一种在地震数据采集过程中加入硬件时间戳的方式、以及本地时钟的电压控制晶体振荡器不稳定性进行实时调节,讨论了在GPS信号丢失的情况下通过AD9548锁相环芯片对GPS的1PPS信号在一定时间内进行保持,保证各个节点的时间同步精度。为分布式无线地震数据采集中节点间时间同步提供了一种有效的解决方式。
2 系统方案设计
分布式地震数据采集系统基本结构如图1所示,主要由采集中心和采集节点两部分组成。采集中心主要功能为实现对各个节点命令及数据收发、数据处理、数据存储。采集节点内包含两部分:三分量地震数据的高精度采集、地震数据的时间标记。
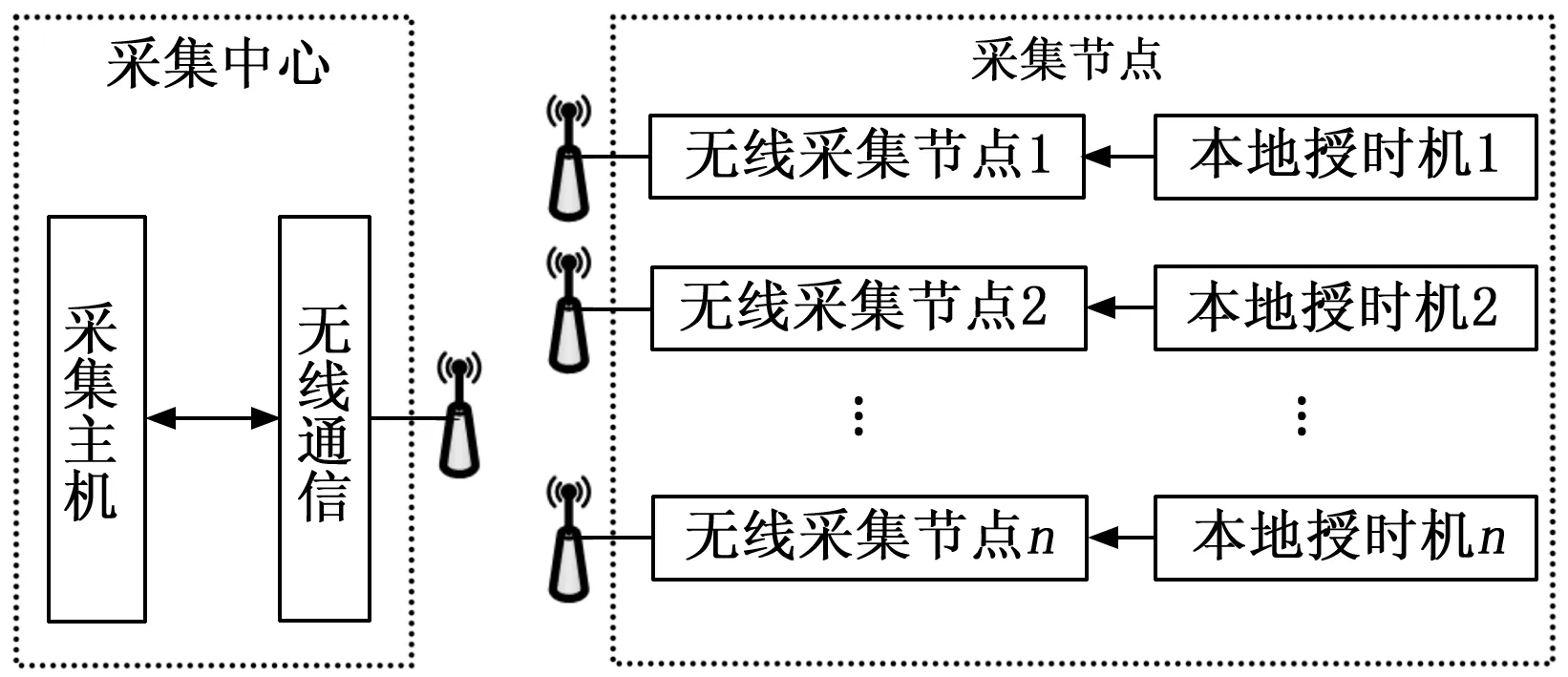
图1 地震数据采集基本结构
采集中心与各采集节点采用无线通信的方式进行数据及命令传输。数据采集各节点外加本地授时机用于数据采集过程中对地震数据进行时间标记,这样时传回采集主机的数据具备时间信息,方便采集主机对各部分数据进行同步处理。
3 本地授时机设计
3.1 GPS授时原理
全球定位系统(globe positioning system, GPS)是一种结合卫星及通信发展技术,利用导航卫星进行测时和测距。
GPS由24可卫星组成,其主要功能为向用户发动伪距和载波信号,用户经过GPS接收机接收卫星信号进行进一步处理提供导航定位服务。除此之外,由于具有高稳定性的原子时钟,也可为用户提供授时服务。其载波频率为L1(1575.42 MHz)和L2(1227.60 MHz)两种频率发射载波信号,可以通过设计不同的接收机对其信号进行接收[12-14]。
3.2 GPS接收电路设计
GPS接收电路总体结构如图2所示:主要由天线单元、接收单元、电源三大部分组成。

图2 GPS接收机基本结构
3.2.1 天线单元
天线单元主要由接收天线、前置放大电路及频换器组成。其主要作用是降GPS微弱的电磁波信号转换成相应的电流信号,再经过放大变频后将稳定的信号输送给接收单元。
3.2.2 接收单元
接收单元主要由信号通道、存储器、微处理器及电源等4部分组成。信号通道是接收机核心部分,主要负责对卫星信号进行解码、解调等功能。存储器主要功能为暂存接收机采集到的伪距、载波等信息数据。微处理器主要功能为协调整个接收机工作,主要有接收机自检、卫星搜索、计算位置及方位角信息、输出GPS数据信息等功能。
GPS接收电路核心采用VK1612U8M3LF低功耗GPS接收模块,该模块具有灵敏度高、功能全面等特点。该模块接收频率为L1频段(1 575.42 MHz),时间输出精度可达30 ns,具有良好的授时精度。接收电路如图3所示,模块外接3.3 V备用纽扣电池,保证了模块在外部电源短时失效情况下能继续保持稳定的工作,同时接收芯片将固定格式的时间位置信息码以串口通信的方式传输至主控芯片,TIMEPUSE引脚在接收信号有效时将输出脉冲宽度为100 ms的高精度1 PPS脉冲信号。
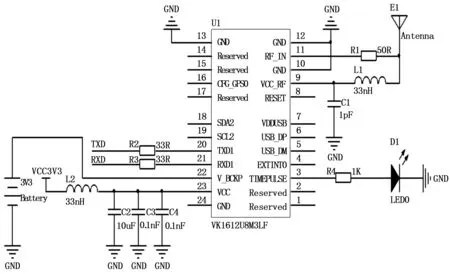
图3 GPS接收电路
3.3.3 GPS本地时钟授时设计
如图4所示,GPS本地授时主要由GPS接收机和主控MCU两部分构成。GPS接收机通过天线将GPS信号转换为标准的1 PPS信号,同时将时间、位置等信息通过串行数据通信的方式与MCU进行通信。MCU以中断的方式对1 PPS信号及串口数据进行接收处理,以固定周期的方式通过解析的时间信息对本地时钟进行授时。由于采用本地GPS对本地时钟进行授时的方式进行授时,短时间的GPS信号丢失的情况下对本地RTC时钟仍然可以保持良好的精度。
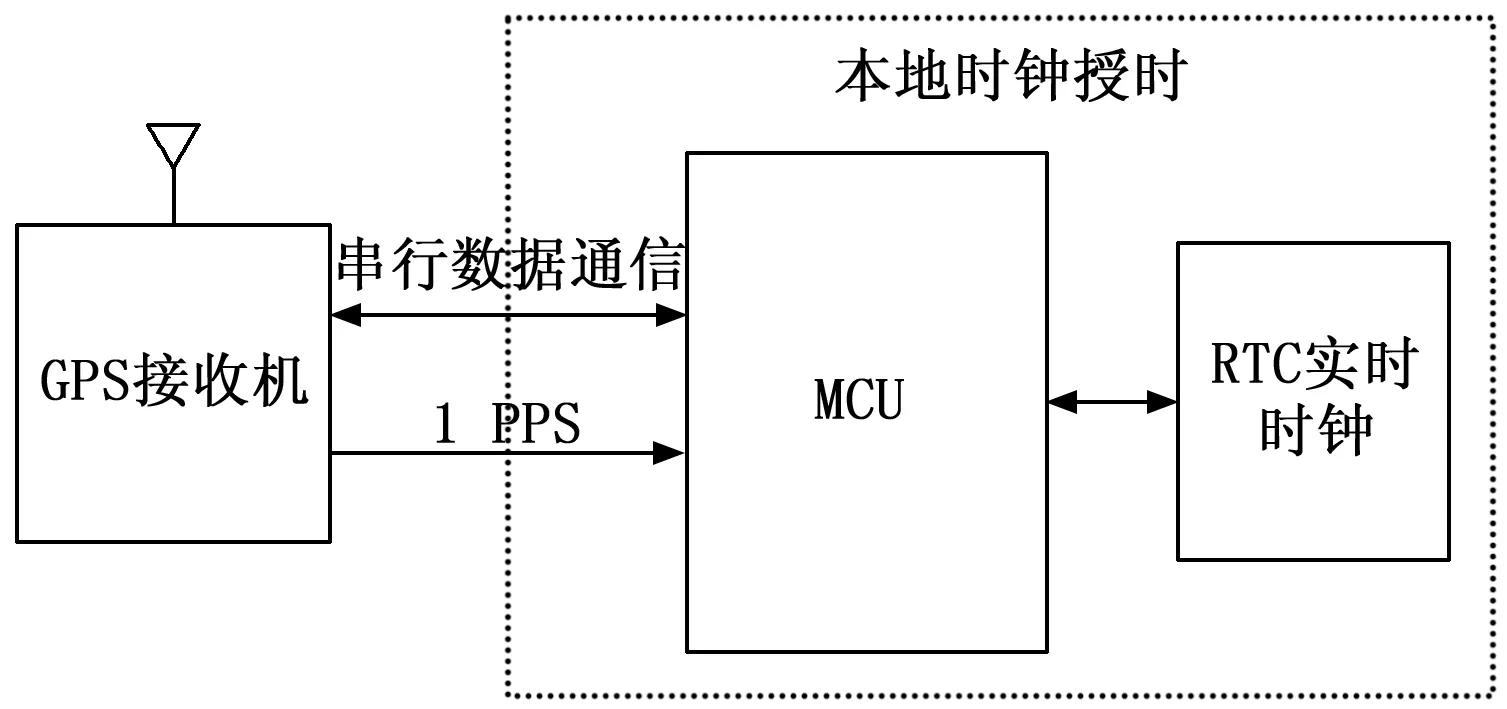
图4 本地时钟授时框图
本地授时机MCU主控芯片选用ST(意法半导体)生产的基于ARM Cortex-M4架构的STM32F405高性能微控制器,该控制器最高处理速度可达168 MHz,同时兼备本地RTC实时时钟功能。在本地授时机中的GPS接收机在接收信号稳定之后,接收机根据NEMA 0183的标准规范,将时间、位置、速度等信息通过串口通信的方式传输至MCU主控芯片。GPS接收机输出的GPRMC语句中包含了定位的日期、时间、以及经纬度信息,数据格式为:GPRMC,<1>,<2>,<3>,<4>,<5>,<6>,<7>,<8>,<9>,<10>,<11>,<12>*<13>
其中<1>-UTC时间,hhmmss.ss(时分秒)格式,<2>-定位状态:A=有效定位,B=无效定位,<3>-纬度ddmm.mmmmm(度分格式),<4>-纬度半球:N(北半球)或S(南半球),<5>-经度dddmm.mmmmm(度分格式),<6>-经度半球:E(东经),W(西经),<7>-地面速率(000.0-999.9节),<8>-地面航向(000.0-359.9度),<9>-UTC日期,ddmmyy(日月年)格式,<10>-磁偏角(000.0-180.0°),<11>-磁偏角方向:E(东),W(西),<12>-模式指示,<13>-校验和。
本地授时机的授时作流程如图5所示,GPS接收机在接收到信号后将时间信息以串口通信的方式传输至MCU,MCU对时间数据采用中断的方式接收,接收到数据后进入串口中断,首先判断是否需要更新时间(判断是否到达更新周期),在判定需要进行时间更新时判断接收数据头是否为GPRMC,若为GPRMC则将对应的数据包存入缓存进一步处理,然后从缓存数据中提取出定位状态判定数据是否有效,若有效将提取出时间信息对本地RTC时钟进行更新,若无效则退出本次中断。
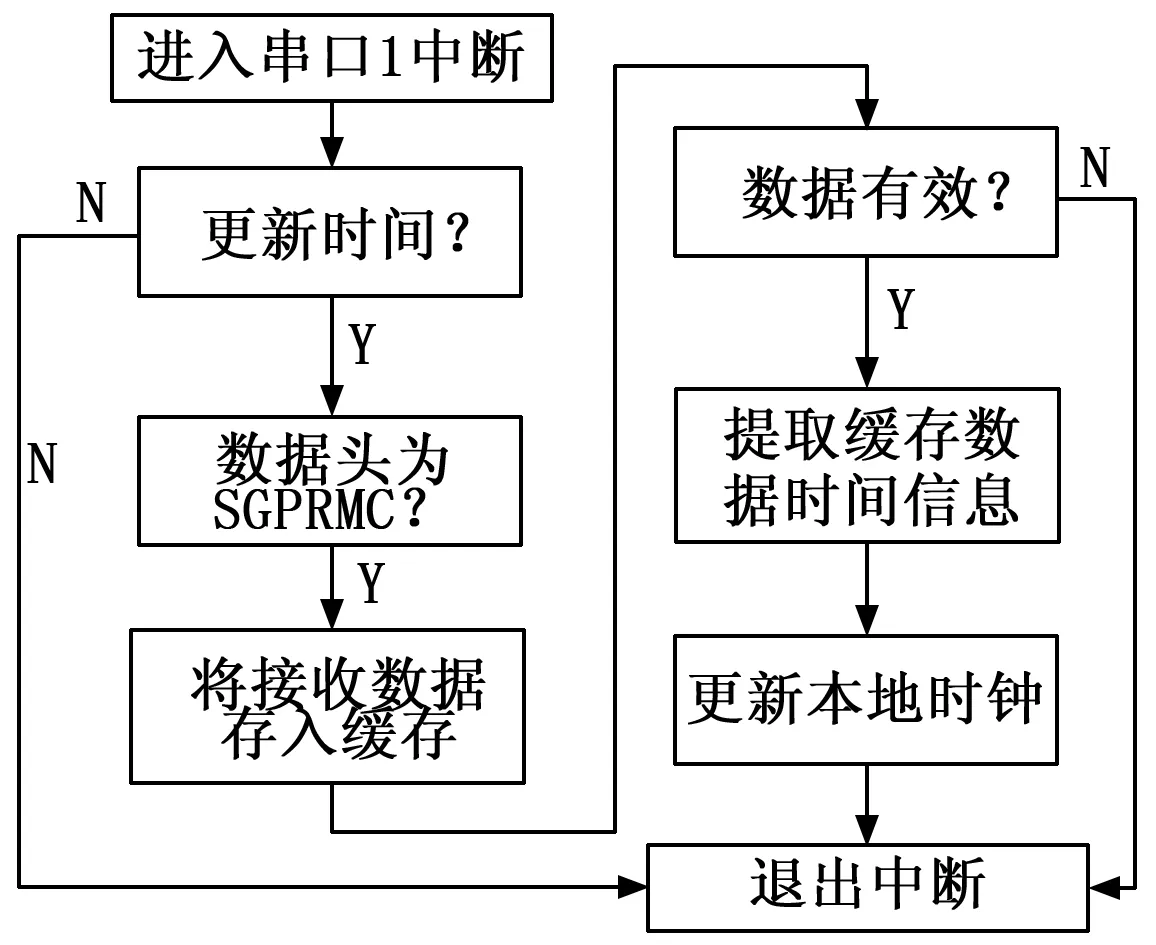
图5 本地时钟授时程序流程图
4 无线数据采集节点校时
在无线地震数据采集中,各个无线数据采集节点采用32.768 K的晶体振荡器进行本地时间计数。随着时间的推移,由于晶体振荡器的差别会导致各个节点之间的时钟存在累积误差,这将造成各个节点的时间不同步、同步精度不高的问题。
因此,为了更好地解决各个节点的本地时钟同步的问题,采用频率可调的电压控制晶体振荡器对本地时钟晶振频率进行实时测量与调节,将各个节点的本地时钟控制在有限的误差范围内。
如图6所示,节点校时主要过程为通过GPS产生的高精度1PPS脉冲对本地时钟晶振频率进行秒间计数,并根据计数结果对本地时钟频率进行实时校准,校准方式采用DAC电压调节的方式对本地晶振进行频率调整。理想情况下,32.768 K的晶振在1 s间隔内其计数值为32 768,通过秒间计数器计数值判断将本地晶体振荡器的频率进行调高或者调低。如果计数值小于32 768,则可认为频率过慢,适当增加晶体振荡器频率,反之则增加晶体振荡器频率,采用动态频率调节方法可有效的将本地晶振频率控制在有限的误差范围内。
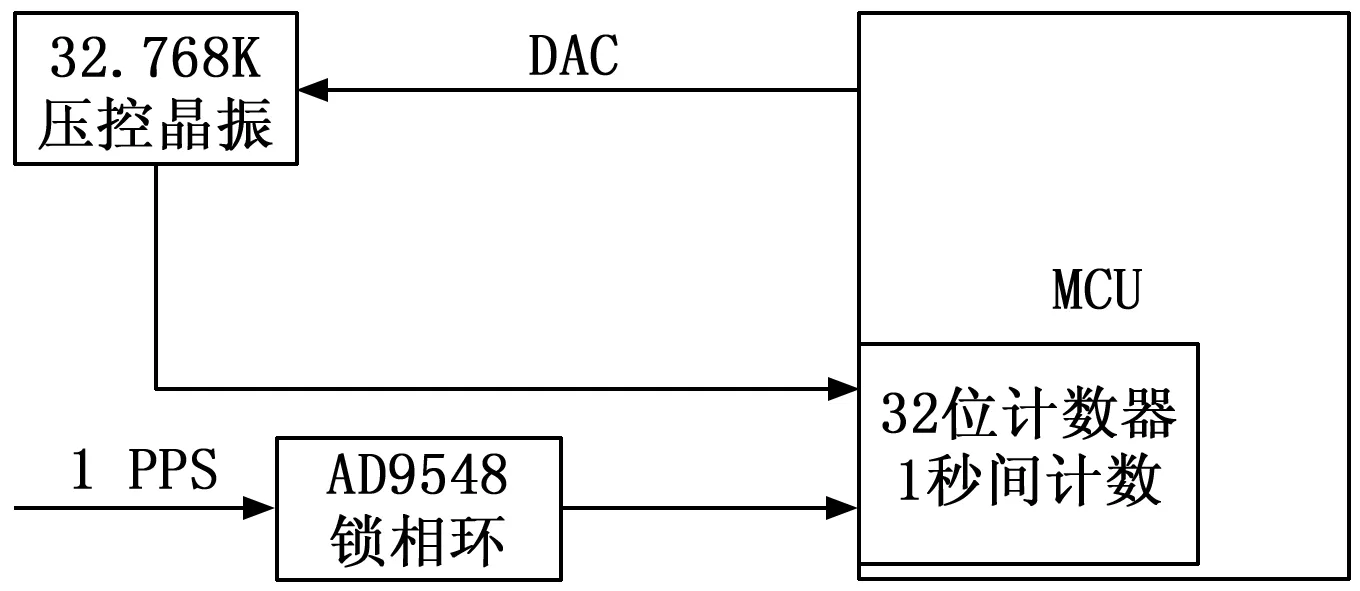
图6 本地校时过程
考虑到GPS信号不稳可能导致的1 PPS信号失效的情况,采用了本地锁相环技术,本地锁相环在1 PPS信号的丢失情况下一定时间内产生高精度的1 PPS信号,使本地时钟校准能继续进行,有效保证各个节点的时钟同步精度。数字锁相环芯片AD9548为GPS 1 PPS脉冲信号进行同步,PLL能减少与外部基准有关的输入时间抖动或者相位噪声,在工作环境稳定的情况下可有效的工作至少6个小时以上。
5 地震数据硬件时间戳标记
在分布式地震数据采集中如何给分布式地震数据打上精准的时间标记成为了分布式地震数据同步采集中研究的关键问题。
系统工作时,MCU首先对外部GPS接收信号进行解析,在确认GPS将本地时钟同步完成之后,整个时钟标记系统开始运行。系统运行时,标记时间由GPS接收机以1秒的标准间隔输出秒级的时间信息,为了得到更加精确的微秒级信息,在每次1 PPS脉冲信号到来时触发MCU内部32位计数器对外部压控晶振输出的10 MHz脉冲信号下降沿进行计数,每个脉冲换算成时间单位即为0.1 μs,在外部设备需要进行时间标记时将发出触发信号,此时时间标记系统立即锁定计数器数值N及GPS输出的秒级时间信息。

图7 时间标记系统图
6 系统测试
系统对两个节点的1 PPS信号以及处理器中断处理延时进行了实际测试,具体结果如图8、图9所示。
两个GPS接收机在接收信号良好的情况下,对两个产生的1 PPS脉冲进行测量,通过测量结果可以看出,两个GPS接收机之间产生的1 PPS信号存在30 ns左右的时间延迟。
同时对处理器引脚的响应时间进行了测试,在上升沿触发中断的情况下,其响应时间在0.13 μs左右,这个时间相对比较固定,可以在后面的软件处理中进行补偿。
如表1所示,采用8组采集节点输入同一个脉冲信号,在输入时对此时刻的锁存住此时计数器值,并输出GPS秒事件信息,通过秒时间信息与计数器值进行组合得到最终的时间结果,其测试结果如下表所示,测试结果表明各个节点在同一时

图8 处理器中断响应延时图9 GPS接收机1PPS延时
刻输入信号的情况下,由于存在相互之间的时间平均误差水平在0.1μs以内。

表1 多节点时钟时钟测试
7 结束语
综上所述,采用GPS授时技术在地震数据采集同步中具有较高的精度,相比于传统的网络授时方法使各个节点的同步精度提高了一个数量级。通过这样的采集同步方式,可降低在分布式多道、高分辨率地震数据采集系统中数据实时传输的压力,为分布式无线地震数据采集中节点增多及数据无线传输延时导致的同步精度不高的问题提供了一种有效的解决方案。
[1] 马永生,张建宁,赵培荣,蔡勋育. 物探技术需求分析及攻关方向思考——以中国石化油气勘探为例[J]. 石油物探,2016,01:1-9.
[2] 李怀良. 复杂山地多波宽频带地震数据采集关键技术研究[D].成都:成都理工大学,2013.
[3] 张晓普,林 君,杨泓渊,等. 陆上地震数据采集系统通讯技术现状及展望[J]. 地球物理学进展,2016,03:1390-1398.
[4]GiammariniM,IsidoriD,PieralisiM,etal.Designofalowcostandhighperformancewirelesssensornetworkforstructuralhealthmonitoring[J].MicrosystemTechnologies,2016.
[5]KafadarO,SertcelikI.AComputeraideddataacquisitionsystemformultichannelSeismicmonitoringandrecording[J].IEEESensorsJournal,2016.
[6]RubinMJ,WakinMB,CampT.Lossycompressionforwirelessseismicdataacquisition[J].IEEEJournalofSelectedTopicsinAppliedEarthObservationsandRemoteSensing,2015.
[7] 林 赞. 分布式网络视频显示同步时钟的设计与实现[D].广州:华南理工大学,2015.
[8] 彭 杰.WLAN数据传输及时间同步技术研究[D].成都:电子科技大学,2015.
[9] 王 洋. 以太网中高精度时钟同步协议的研究与应用[D].北京:北京邮电大学,2014.
[10] 朱祖扬. 地震数据采集器GPS授时系统[D].中国地震局地震预测研究所,2007.
Study of Synchronization Technology of Distributed Wireless Seismic Data Acquisition
Rong Wenzheng1,2, Shen Tong1,2, Lv Zhongyun1,2, Jiang Shan1,2, Guo Lei1,2
(1.State Key Laboratory of Geohazard Prevention and Geoenvironment Protection, Chengdu University of Technology,Chengdu 610059, China; 2.Fundamental Science on Nuclear Wastes and Environmental Safety Laboratory,Southwest University of Science and Technology, Mianyang 621010, China)
Low synchronization precision of data acquisition is an annoying problem in distributed wireless seismic data acquisition due to the increasing of the acquisition nodes and wireless transmission delay. In order to solve this problem, what is put forward is that a scheme of synchronized timing to each node for the synchronous acquisition of the distributed wireless data and accurate time tagging on data packets. In this scheme, GPS (Global Positioning System) timing technology is utilized to issue the real time to the clock on each node for data acquisition, and GPS precise second pulse is also used to correct frequency error of local voltage controlled crystal oscillator so as to suppress the cumulative errors caused by non-synchronization between the nodes. By adding the time stamp information accurately in the seismic data acquisition, ensure that each node between the time synchronization error is limited within 0.1 μs. Even if the GPS signal loss, voltage controlled crystal oscillator and a counter joint action can ensure each node synchronous acquisition stable work 6 hours.
distributed seismic data acquisition;GPS clock timing; voltage controlled constant temperature crystal oscillator;synchronization acquisition; precise time stamp
2016-08-24;
2016-10-13。
获得国家自然科学基金重大科研仪器设备研制专项(41227802);四川省科技支撑计划(2014JY0221)。
荣文钲(1991-),男,在读硕士研究生,主要从事地球物理勘探仪器设备的开发。
1671-4598(2017)02-0134-03
10.16526/j.cnki.11-4762/tp.2017.02.037
TP18
A
