车辆特性与ABS控制算法的适应性研究
2017-03-21姚竹亭高红梅李闯闯谢家顺
李 伟, 姚竹亭, 高红梅, 李闯闯, 谢家顺
(中北大学 机械与动力工程学院,太原 030051)
车辆特性与ABS控制算法的适应性研究
李 伟, 姚竹亭, 高红梅, 李闯闯, 谢家顺
(中北大学 机械与动力工程学院,太原 030051)
针对车辆防抱死制动系统(ABS)控制算法的选择及适用问题,提出控制算法的选择应与车辆结构及实际性能要求相结合的方法,可以充分发挥不同ABS控制算法的优越性;使用Matlab/Simulink仿真软件建立车辆单轮制动模型,针对不同的初始制动车速和质心位置向后移动两种情况,分别采用变结构滑模控制和PID控制进行了制动过程的模拟与研究;仿真结果表明,当车辆结构及制动条件发生变化时,两种控制方式都能很好的完成制动,且各有优点,可以满足不同制动性能的需求。
防抱死制动系统; 滑模控制; PID ; 质心
0 引言
汽车防抱死制动系统是防止汽车制动时车轮抱死,缩短制动距离并使方向保持良好稳定性的一种汽车安全装置。ABS系统必须具有很强的抗干扰能力、较强的鲁棒性和实时性,这些特点决定了算法的基本类型和繁简程度。目前,车辆已被人们广泛应用到生产生活中,而防抱死制动系统(ABS)作为一种能极大提高汽车安全行驶的有效手段被研究者们所重视,其控制方式得到不断改进,种类也在逐渐增加,主要的控制方式有:逻辑门限值控制、PID控制、模糊控制和神经网络等[1]。各种控制方法都有其局限性,致使上述方法并不独立应用在汽车上,为了达到更好的控制效果,一般都是几种控制方式组合起来应用。
目前国内外的ABS产品大多采用逻辑门限值控制策略,但其门限值需经过多次实验才能获得,对路面的适应性较差,且不能充分利用路面特性[2]。为实现连续控制,提高制动过程中的平顺性,适宜以滑移率作为控制。以滑移率为主的控制方式有PID控制、滑模控制和模糊控制等。PID的优点在于无需了解控制对象及环境的实际模型,只需依据已有经验进行参数整定便可,但由于实际制动情况的非线性、时变性和不确定性,PID很难实现参数的实时整定,而滑模控制恰恰可以满足这些要求。这些控制方法通常只考虑如何防止车轮的抱死以及车辆的制动效果,但却较少的考虑车身结构,例如质心位置的影响[3]等,以及复杂工况下车辆制动的稳定性,结果无法达到最佳的制动效果。
本文以PID控制和滑模控制为主要控制方式,结合车辆制动初速度改变和质心位置移动两种情况,研究ABS控制算法与车辆实际工况及自身结构之间的相互影响关系,并将两种控制算法的控制效果进行对比,提出应结合车辆结构以及对实际制动性能的具体要求来选择相应的控制方式。
1 车辆制动过程动态模型建立
1.1 车辆运动模型
用车辆的整车运动模型可以根据牛顿力学建立各个刚体部件的运动模型,而后再根据不同的用途确定模型的简繁程度。本文建立单轮车辆模型来构建控制仿真系统[4]。
单轮车辆模型不考虑车辆侧倾、轮胎的滚动阻力、空气阻力等的影响。模型示意图如图1所示。
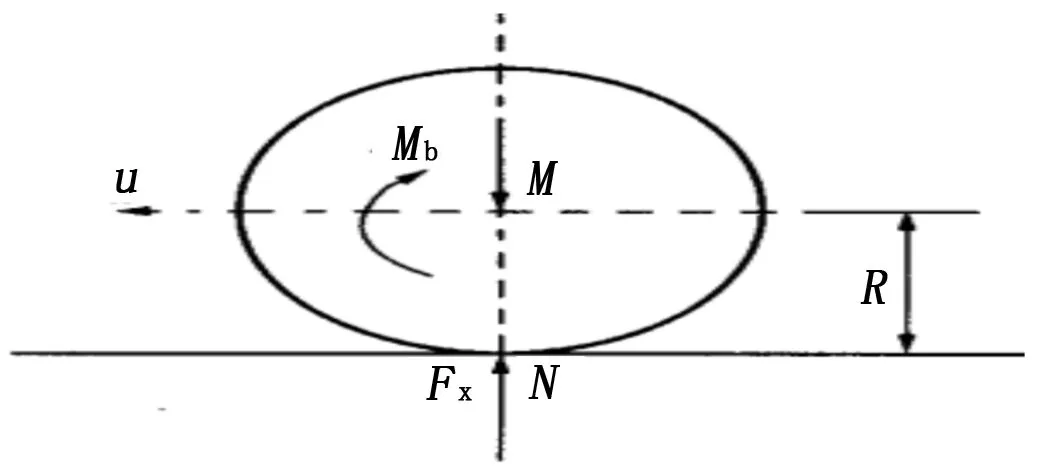
图1 单轮车辆模型
其数学描述为:
车辆运动方程:
(1)
车轮运动方程:
(2)
车辆纵向摩擦力:
(3)
滑移率[5]:
(4)

1.2 制动系统及滑移率模型
制动系统主要包括液压传动机构和制动器。仿真时假设制动器为理想部件,并且其非线性比较弱,同时忽略制动器的滞后性造成的影响。液压传动系统建模主要考虑制动力调节器的制动压力随电磁阀电流变化的关系,为了简化制动系统,将液压传动系统简化为一个电磁阀和一个积分环节[6]。传递函数为:
(5)
制动器模型主要建立制动力矩和气液压力之间的关系模型。在此,忽略滞后影响,建立制动器方程为:
(6)
式中,TB为制动力矩(N·m);kp为制动器制动系数(N·m/kPa);P为制动器气液压力(kPa)。由式(5)、(6)建立的制动系统仿真模型如图2所示。

图2 制动系统仿真模型
同时,根据滑移率公式(4)可以直接建立滑移率计算模型如图3所示。
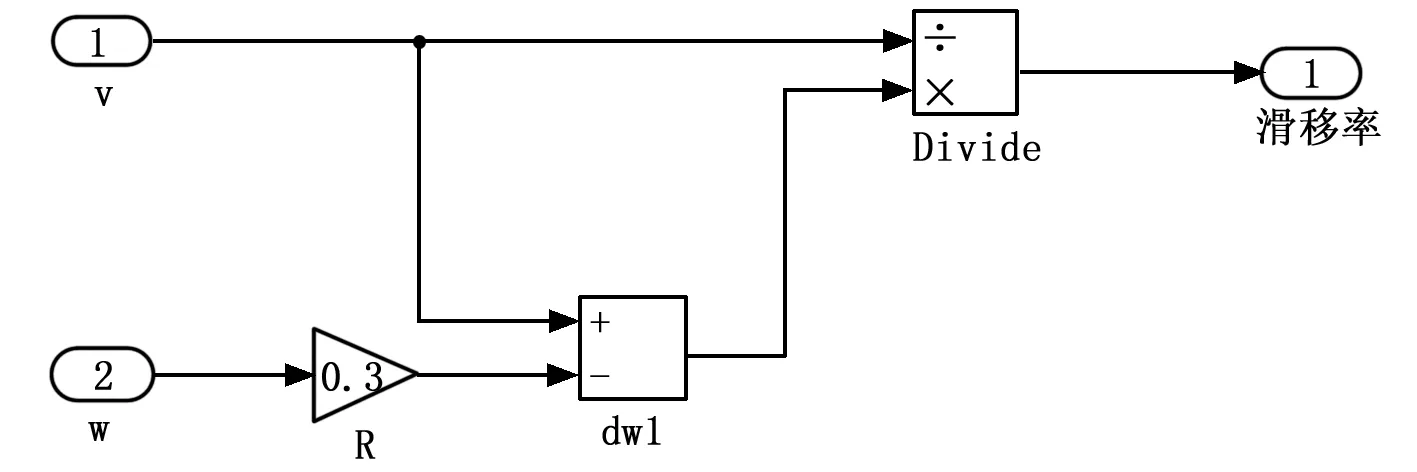
图3 滑移率计算模型
1.3 轮胎纵向附着系数模型
影响附着系数的因素有很多,包括滑移率、轮胎和道路材料、路面状况和汽车速度等。实际应用中,关系式将更为复杂,根据简化的”Dugoff”模型[7],路面附着系数与车轮滑移率之间存在一定的函数关系:
(7)
φh为峰值附着系数,φg为车轮完全抱死时的附着系数,S0为峰值附着系数对应的滑移率。由(7)式建立附着系数仿真模型如图3所示。

图4 附着系数模型
2 控制器设计
采用PID控制和滑模控制为主要方式的ABS系统,其控制原理都是搜寻到汽车制动的最佳滑移率点,使汽车制动过程中始终围绕在最佳滑移率附近工作,以获得较高的纵向附着系数,减小制动距离,保证制动时方向的稳定性。
2.1 滑模控制器设计
对于单轮车辆系统模型,取滑移率状态偏差量为:
(8)
式中,λ为实际滑移率;λd为期望滑移率。
构建滑模面为:
(9)


(10)
得到:
(11)
将式(11)与式(2)联立可得等效控制ued:
(12)
滑模控制率的设计,要求滑动模态域周围的状态轨迹都指向滑动模态域,因此到达滑模面之后必须满足条件:

(13)
为了满足式(11),同时尽量削弱到达时产生的抖振,引入变结构指数趋近率[8]:

(14)
(15)

图5 滑模控制模型
2.2PID控制器设计
PID控制是比例控制作用、积分控制作用与微分控制作用的组合,具有三种单独控制作用的优点。其控制器方程为:
(16)
Matlab/simulink中含有PID控制模块,可直接调用。经参数优化整定后,确定其常数分别为:
Kp=120、Ki=12.4、Kd=2.4
3 仿真及结果分析
3.1 汽车ABS系统仿真
在Matlab/simulink环境下,分别以滑模控制和PID控制为控制器,针对不同制动初速及质心位置的移动进行仿真研究,以得出结论。仿真参数如表1[9]和表2所示。

表1 仿真路面实验参数

表2 仿真车辆参数
车辆ABS制动系统仿真建模如图6所示。

图6 ABS制动系统仿真模型
3.2 仿真结果分析
车辆以相同的初始速度50km/h进行制动,仿真结果如图6~8所示,两种控制方法都可以有效的对车辆进行制动控制。由图7可知,PID控制的制动距离与制动时间都小于滑模控制,制动性能较好。从图8和图9可以看出,在制动调节过程当中,PID控制会产生较大的振幅波动,而滑模控制比较平滑且时间较短,对于车辆制动调节的平稳性,滑膜控制优于PID控制。

图7 制动距离对比曲线

图8 滑移率误差响应曲线对比

图9 滑移率响应曲线对比
当初始制动速度相同,质心位置发生变化时,仿真结果表明:随着质心位置的后移,两种控制方式都通过增加制动力矩来达到快速制动的效果,PID控制在制动调节过程当中,各项性能指标的抖动振幅都在减小,且可以更快地达到平衡;滑模控制的抖动很小趋于平滑,更加稳定。
保持车辆质心位置不变,初始制动车速分别为30km/h和50km/h,仿真结果如图11所示。随着速度的增加,PID控制制动力矩的调节振幅增加,但最终值保持不变,在其滑移率调节过程中调节振幅有所下降,单次制动周期增加,但制动次数减少,达到平衡的调节时间缩短,这是由于,相对30km/h的低速制动而言,50km/h制动的初始制动力矩较大,且单次制动持续时间较长而导致的;滑模控制滑移率调节过程基本维持不变,主要通过将初始制动力矩由156提升到260来达到这一效果的。
整体仿真结果表明PID控制的制动距离和制动时间优于滑模控制,但是在制动过程中,PID控制的制动力矩以及滑移率的调节振幅抖动较大,因此,在控制的调节平稳性方面相对于滑模控制就有所不如;车辆质心位置移动时,两种控制方式都适当提高了制动力矩,调节振幅有所变化但调节时间基本保持不变;车辆速度改变时,采取的措施和效果却完全不同,此时两者提高了制动力矩的调节幅值或初始值,且制动时间有所改变。因此,相对于不同的车辆结构或制动条件而言,不同的控制算法其制动特性也有所差异。
4 结语
通过将PID控制与滑模控制进行仿真对比,可以看出,在制动调节方面它们各有优点。结合车辆结构和实际所需要的制动性能来选择适合的ABS控制算法,能充分发挥控制系统的作用以及满足不同用途车辆的制动需求。
[1] 曲宁玺, 张 勤, 神谷好承. 基于制动时间间隔的ABS控制策略研究[J]. Machinery Design & Manufacture, 2011(4):211-213.
[2] 毛艳娥, 井元伟, 曹一鹏,等. 基于RBF神经网络的汽车ABS滑模控制器的设计[J]. 东北大学学报:自然科学版, 2009, 30(3):309-312.
[3] 李剑峰, 高 利. 车辆质心纵向位置变化对车辆侧向响应的影响[J]. 现代制造工程, 2006(3):112-113.
[4] 严运兵, 吴 浩, 赵 慧. 汽车防抱死制动系统的 H∞鲁棒控制[J]. 汽车工程, 2014, 36(4):453-458.
[5] 郑太雄, 李倩敏, 邬 彪. 基于ADAMS与MATLAB的汽车ABS控制策略的联合仿真[J]. 计算机应用与软件, 2014(5):68-70.
[6] 杨成慧. 模糊控制ABS制动系统仿真模型建立研究[J]. 兰州交通大学学报, 2015, 34(3):97-101.
[7] 肖启瑞,樊明明,等. 车辆工程仿真与分析基于MATLAB的实现[M]. 机械工业出版社,2012.
[8] 孟 杰, 陈庆樟, 张 凯,等. 防抱死制动系统的滑模变结构控制方法研究[J]. 重庆交通大学学报:自然科学版, 2015(2):141-143.
[9] 潘 辉, 李礼夫. 基于路面识别的汽车ABS滑模控制方法的研究[J]. 现代制造工程, 2011(2):43-47.
Research on Adaptability of Vehicle Characteristics and ABS Control System
Li Wei,Yao Zhuting,Gao Hongmei,Li Chuangchuang,Xie Jiashun
(School of Mechanical and Power Engineering, North University of China, Taiyuan 030051, China)
The structure and use of the vehicle are different ,and every kinds of ABS control algorithm have their own characteristics,so the point that the choice of ABS control algorithm should be combined with vehicle structure and the actual performance are proposed.By considering the different initial speed and the change of the vehicle’s mass center position, the single wheel brake model of vehicle is built by using Matlab/Simulink, and it is used to the simulation research of the vehicle braking process which is controlled by PID or Sliding mode. The simulation results show that the two control methods are all able to complete the task and each of them has its own advantage ,the control system could meet the requirements of any users.
ABS(anti-lock braking system); sliding mode; PID; mass center position
2016-09-14;
2016-10-14。
李 伟(1990-),男,山西原平人,硕士研究生,主要从事自动控制,机械系统故障诊断方向的研究。
姚竹亭(1964-),女,山西太原人,教授,硕士研究生导师,主要从事自动控制,机械系统故障诊断方向的研究。
1671-4598(2017)02-0095-03
10.16526/j.cnki.11-4762/tp.2017.02.026
文献标识码:A
