转盘式测试分选机主电机高精速定位控制研究
2017-03-21缑新科刘泽军
缑新科, 刘泽军
(兰州理工大学 电气工程与信息工程学院,兰州 730000)
转盘式测试分选机主电机高精速定位控制研究
缑新科, 刘泽军
(兰州理工大学 电气工程与信息工程学院,兰州 730000)
对转塔式测试分选机上的直驱电机进行高精速定位控制技术研究;对测试机上的直驱电机控制的主要目的是要求在50 ms内直驱电机每转22.5°都能够快速精确定位,且超调量很小;直驱电机采用矢量控制策略,以雅科贝思的ATR152-138直驱电机为研究对象,对直驱电机及其负载建立数学模型,并讨论了伺服控制位置闭环、速度闭环以及电流闭环中3个控制器的工程设计方法;在MATLAB/SIMULINK环境下建立基于控制策略的位置、转速和电流三闭环直驱电机仿真模型,并分别对位置环采用模糊P控制和位置环P控制进行仿真实验分析,发现采用模糊P控制的位置环比采用P控制的位置环精度更高,超调量更小,基本为0;仿真结果证明该直驱电机调节器设计合理,位置和速度响应非常快,满足转塔式测试分选机的要求。
转盘式测试分选机;主转盘电机;矢量控制;高精速
0 引言
随着集成电路的飞速发展,使得芯片的尺寸,引脚都越来越小,从而导致对测试此类芯片的测试机性能要求更高。目前国内的测试机如电性能测试机,打标机,编带机等由于速度慢,功能单一问题不能满足现在的小尺寸芯片测试。目前对于小尺寸芯片的测试,大多采用转盘式测试分选机,转盘式测试机所有工位都可以并行工作,相当于CCD检测,打标,编带,电性能测试,转向等功能同时工作,这样使得测试速度大大提高,所以转盘式测试机是将来测试分选设备发展的趋势[1]。
为了满足国内对高端测试分选设备的需求,同时打破国外对转盘式测试机的垄断,开始了对转盘式测试机技术的研究,转盘式测试分选机对速度和精度的要求很高,而其主电机的控制决定了运行的速度和精度,因此需要对主转盘电机进行高精速定位控制研究。
1 主转盘电机性能指标要求
根据设计的转盘式测试分选机的设备参数:要求每小时测试分选产量UPH为36K/hour,工位数为16,参见图1[2]。电路在每两个工位之间的移动角度为22.5°。根据UPH设计要求,可知完成一颗电路测试分选的最大时间为0.1 s,所以主转盘电机每移动一格的时间在0.05 s之内。待测电路的引脚间距最小在0.5 mm,同时电路的测试触点很小,这要求主电机每转22.5°时停下来的定位精度足够高。电路定位精度不够会使电路不能够准确放入工位,造成电路损坏。在传统的驱动系统中,电机和负载之间连接着减速器或齿轮箱等传动机构进行伺服控制,此种方式增加了系统的损耗,影响控制精度,而且增加了安装维护成本,而直驱电机具有无机械传动连接、机械结构简单、控制精度高、运行效率高、可靠性好、使用寿命长等优势。根据这样的工况要求,因此选择直驱电机作为设备的主电机。
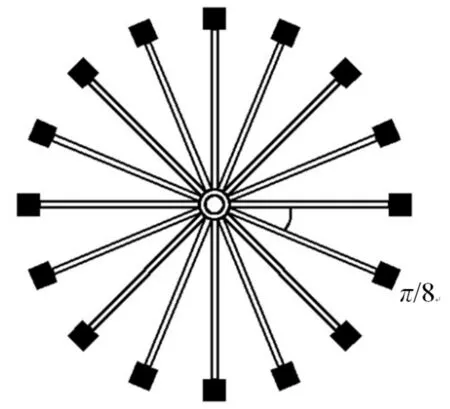
图1 转盘图
2 主转盘电机数学模型
直驱电机与转盘负载连接机构如图2所示。

图2 电机连接图
为方便建立其模型,对电机进行数学分析,通常对被研究的电机作下列近似[3-4]:
1)不考虑磁路饱,磁路理解为线性饱和影响;
2)电机定子三相绕组在空间平均分布;
3)不考虑阻尼效应;
4)电机电势以及定子磁势呈现正弦化。
采用d-q坐标系,忽略摩擦,电机运行是理想状态的,电机的数学模型[4]由下列方程式来表达:
对于转盘负载而言动力学[5]方程式如下:
式中,UdUq为d-q轴电压,idid为d-q轴电流,LdLq为d-q轴电感,R为定子绕组电阻,Pn为电机极对数,Wr为机械角速度,ψf为转子磁钢在定子上的耦合磁链,J为系统转动惯量,Tl为负载力矩,M为转盘质量,r为转盘半径,Jl为转盘转动惯量。
3 主转盘电机伺服系统设计
3.1 电机伺服矢量控制系统的设计
由矢量控制原理,设计了含有位置环、速度环、电流环的三环控制的电机矢量控制系统,在电机伺服矢量控制系统中,电流环和速度环为内环,位置环为外环,三者构成闭环系统,这样的结构可以使伺服系统获得较好的动态跟随性能和抗干扰性能,并且能够快速精确定位。
但是难点在于直驱电机在快速定位时可能会产生超调现象,这样会使直驱电机在定位时产生抖动,会损坏器件,所以为了解决电机转动过程中产生超调这难点,位置环采用模糊P控制,速度环采用PI控制,电流环采用PI控制。基于的矢量控制原理如图3所示[6]。
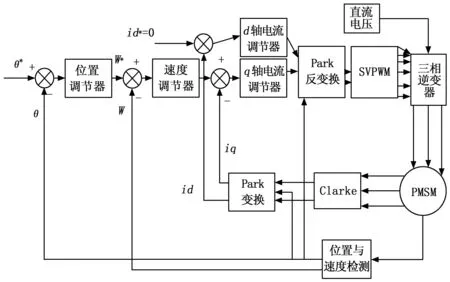
图3 矢量控制原理图
3.2 电机伺服系统三环控制模型
电机伺服控制系统由位置环、速度环、电流环三闭环构成。
3.2.1 电流环模型
电流环是交流位置伺服系统中一个重要的环节,它是提高伺服系统控制精度和响应速度,改善控制性能的关键。

图4 电流闭环结构
3.2.2 速度环模型


图5 速度闭环控制图
3.2.3 位置环模型


图6 位置结构图
但是比例调节器可能导致定位精度不够高,超调大,位置环采用模糊P控制。模糊控制作为智能控制的一种类型,用模糊控制更具有优越性[9]。
将输入偏差E,偏差变化率EC和控制量模糊化且模糊集均为7个,分别为{负大,负中,负小,零,正小,正中,正大},记作{NB,NM,NS,ZO,PS,PM,PB},论域都为[-3 3],隶属函数都为Z型,三角形,S型结合的模式。 当以不同的E和EC作为输入时,根据P模糊控制的特点,Kp会呈现规律性的变化,根据此变化特点,以及工程设计人员的技术知识和实际操作经验,建立合适的关于E,EC,Kp的模糊规则。利用中心法对输入的模糊集合进行去模糊化处理,控制参数Kpp=Kp0+Kp,Kp0为初始值。
4 系统仿真与分析
选择雅科贝思ATR152-138型直驱电机作为设备的主电机,该电机参数如下:电机连续功率91.9 W,最大功率827.5 W,最大速度835 rpm,极对数Pn为8,电阻R为1.92ohms,d-q轴电感16.5 mH,转子惯量0.001587 kgm2,额定转矩17.8 Nm,额定电流6.9 A,转子磁链0.215 Wb;在MATLAB/SIMULINK中采用id=0矢量控制仿真如图7所示。

图7 矢量控制仿真图
由图7可知,系统调节器由模糊P控制的位置环,PI控制的速度环,PI控制的电流环组成。在MATLAB/SIMULINK中进行仿真,以电机转一个工位为研究目标,即转盘分16个工位,每转一个工位22.5°。电机转22.5°时采用模糊P控制的位置图如图8(a)所示,速度图如图8(b)所示。位置调节器采用P控制的位置图如图8(c)所示,速度图如8(d)所示。
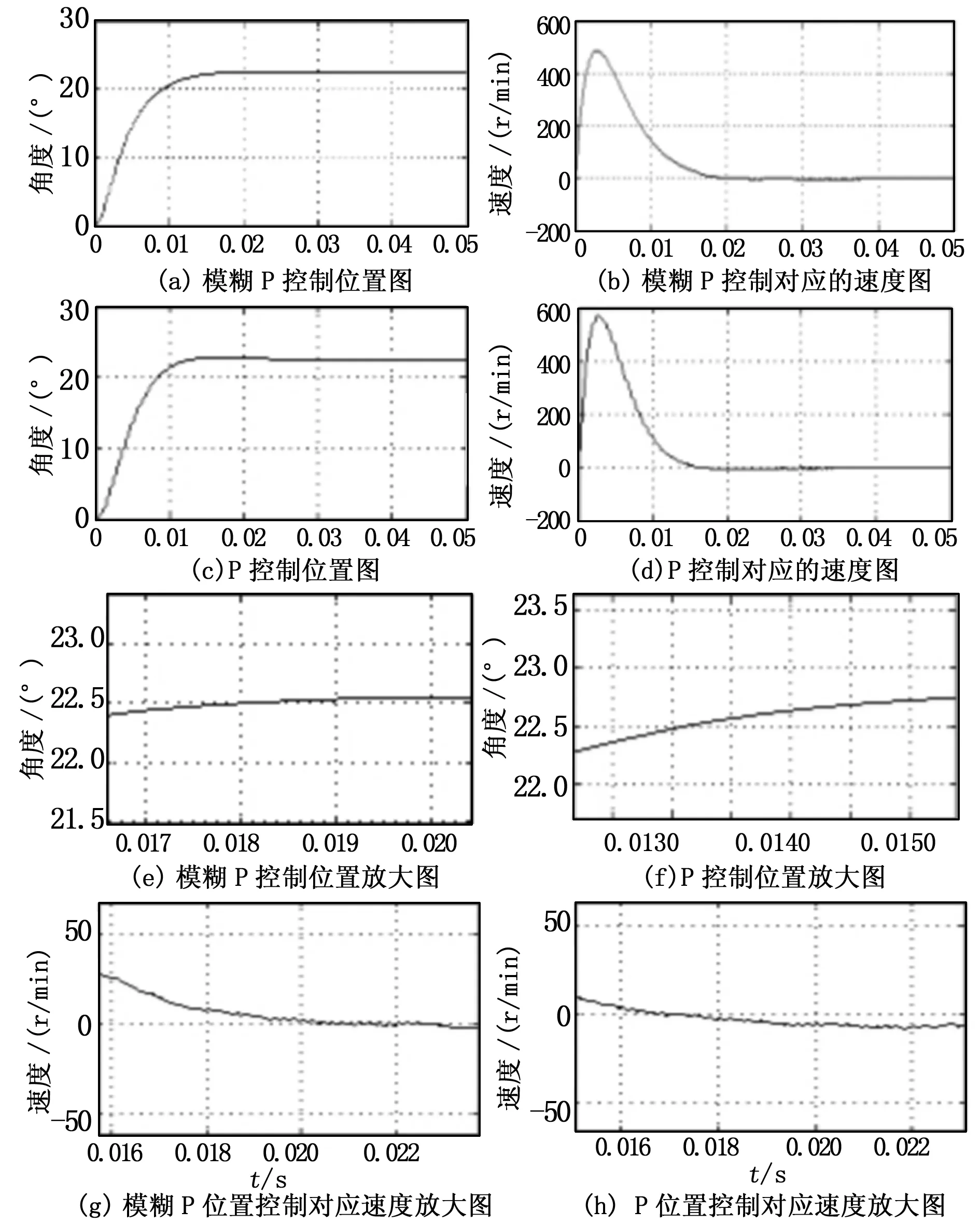
图8
对模糊P控制的位置图和P控制的位置图进行放大,放大后的位置图如图8(e)和8(f)所示,由图8(e可知,电机到达22.5°位置,基本没超调,在0.02s基本稳定,而图8(fP控制的位置图超调还是很大的,不满足测试分选机要求。通过对比发现,模糊P控制方法符合转盘高精速的运动条件,定位精度很高。
对速度图进行放大,对应的图如8(g),8(h)所示,从图8(g)可看出速度在0.02 s时振荡很小,基本为0。而由图8(h)看出在0.018 s后,电机速度曲线明显不如图8(g),速度没有稳定在0,所以模糊P控制的位置环相比P控制的位置环而言,能够满足转盘式测试机高精速的运动要求。
5 结语
阐述了在转盘式测试分选机主转盘电机的数学模型基础上,采用矢量控制以及的控制策略,可以简化控制过程及提高电机的控制性能。在数学模型的基础上,分别建立电机伺服系统的电流环、速度环和位置环,基于电机矢量控制的思想,在MATLAB/SIMULINK环境下,采用模块化的设计方法,构建了控制仿真模型,对矢量控制方法进行了仿真研究,结果表明采用模糊P控制方法的位置环比传统的P控制的位置环精度更高,稳定性更好,满足了转盘式测试分选机上主转盘高精速定位控制的要求。
[1] 王晓东.半导体测试分选编带机的简单系统工程分析与评价[J].电子工业专用设备,2009,173(6):24-28.
[2] 芦 俊, 曹盘江,皮志松.转盘式分选机中高速旋转吸盘的动力学分析与计算[J].机械设计,2011(12):28-12.
[3] Zhang B Y,Huang Z C,Feng G H.Design and characteristic analysis on direct drive permanent magnet synchronous[A].Proceeding of 2011 International Conference on Electrical Machines and Systems(ICEMS)[C].2011(8):1-4.
[4] 孙 宇,王志文,孔凡莉,等.交流伺服系统设计指南[M].北京:机械工业出版社,2013.
[5] 梁景凯,盖玉先.机电一体化技术与系统[M].北京:机械工业出版社,2006.
[6] 陈志杰.高性能永磁同步电机矢量控制系统研究[M].南京:南京东南大学出版社,1993.
[7] Morimoto S, Takeda Y, Hirasa T. Current phase control methods for permanent magnet synchronous motors[J]. IEEE Trans. on PE, 1990,5(2):133-139.
[8] 苏彦民,李 宏.交流调速系统的控制策略[M].北京:机械工业出版社,1998.
[9] 许振伟,蒋静坪,骆再飞.基于神经网络的永磁同步电动机模糊自适应控制[J].电力系统及其自动化学报, 2003(33):49-52.
Research on the Main Motor for High-speed Precision Positioning Control in Test Handler Using turntable
Gou Xinke,Liu Zejun
(Lanzhou University of Technology, Lanzhou 730000, China)
Research on the direct drive motor for high-speed precision positioning control in turret testing handler . The main purpose of the direct drive motor control on the test machine is that direct drive motor rotation 22.5 degrees can be fast and accurate positioning and overshoot is very small in 50 ms. Direct drive motor uses vector control strategy, it takes ATR152-138 of AKribis as research target for the study. Establishing the mathematical model of direct drive motor and its load and discussing three methods of the controller such as Position closed-loop, Speed closed-loop, Current closed-loop in the engineering design. Under the environment of MATLAB/SIMULINK to establish direct-drive motor simulation model which bases on the location of control strategy, the controllers are position, speed and current closed-loop, the position closed-loop uses fuzzy P control and P control, The motor simulation analysis shows that direct drive motor which uses fuzzy P control has higher precision than P control. the overshoot is very small. The motor simulation analysis shows that direct drive motor controllers are designed very well. Position and speed of response is very fast, it meet the requirements of test handler.
test handler using turntable; main turntable motor ; control strategy; high-speed precision positioning control
2016-09-10;
2016-09-28。
江苏省科技支撑计划基金资助项目(2014)。
缑新科(1967-),男,甘肃天水人,教授,主要从事智能结构及动力系统控制,检测与自动化装备。
1671-4598(2017)02-0088-03
10.16526/j.cnki.11-4762/tp.2017.02.024
TP23
A
