餐厅服务机器人控制系统设计与实现
2017-03-21蔡俊杰吴益飞徐航宇
蔡俊杰,吴益飞,徐航宇,章 伟
(南京理工大学 自动化学院,南京 210094)
餐厅服务机器人控制系统设计与实现
蔡俊杰1,吴益飞2,徐航宇3,章 伟4
(南京理工大学 自动化学院,南京 210094)
通过对餐厅服务机器人控制系统需求进行分析,提出了以微控制器MSP430F5438为核心的餐厅服务机器人控制系统总体设计方案;该方案采用模块化方法完成了控制系统硬件电路设计,主要包括:主控模块、电源及管理模块、运动控制模块、无线通信模块、导航定位模块、安全避障模块和人机交互模块等;介绍了控制系统软件的总体流程,完成了控制系统嵌入式软件的设计;实验结果表明,所设计的控制系统应用于餐厅服务机器人可以实现送餐的功能,控制效果良好,实用性强,具有显著的推广应用价值。
餐厅服务机器人;送餐;控制系统
0 引言
随着社会老龄化问题日趋加剧,社会人力成本不断增长,各行各业普遍面临着成本上涨和招工难等问题,特别是规模不断扩大的餐饮业,虽然不断提高服务人员的工资待遇,但仍然存在招工难的问题,其主要原因是服务人员的工作单调辛苦,年轻人不愿意从事此类工作[1-2]。
随着科学技术的迅速发展,机器人正逐步从传统的工业应用领域走进人们的日常生活[3]。服务机器人作为机器人的一个新的发展方向,是当前机器人应用研究领域的难点和重点,也是今后很长一段时间内机器人发展的主要方向[4]。中国在服务机器人研究领域起步较晚,与日本、美国、德国等发达国家存在的差距较大[5]。作为机器人市场占有量最大的国家,中国正高度重视机器人技术和产业的发展[6]。因此,餐厅服务机器人的研究与开发变得十分必要。
本文提出了一种餐厅服务机器人控制系统,在接收上位机发送送餐指令后,可控制餐厅服务机器人运动到目标餐桌,实现自主送餐功能。
1 控制系统总体设计
图1所示为餐厅服务机器人控制系统总体设计框图,餐厅服务机器人系统可分为机械结构系统、嵌入式系统、终端机监控系统等。
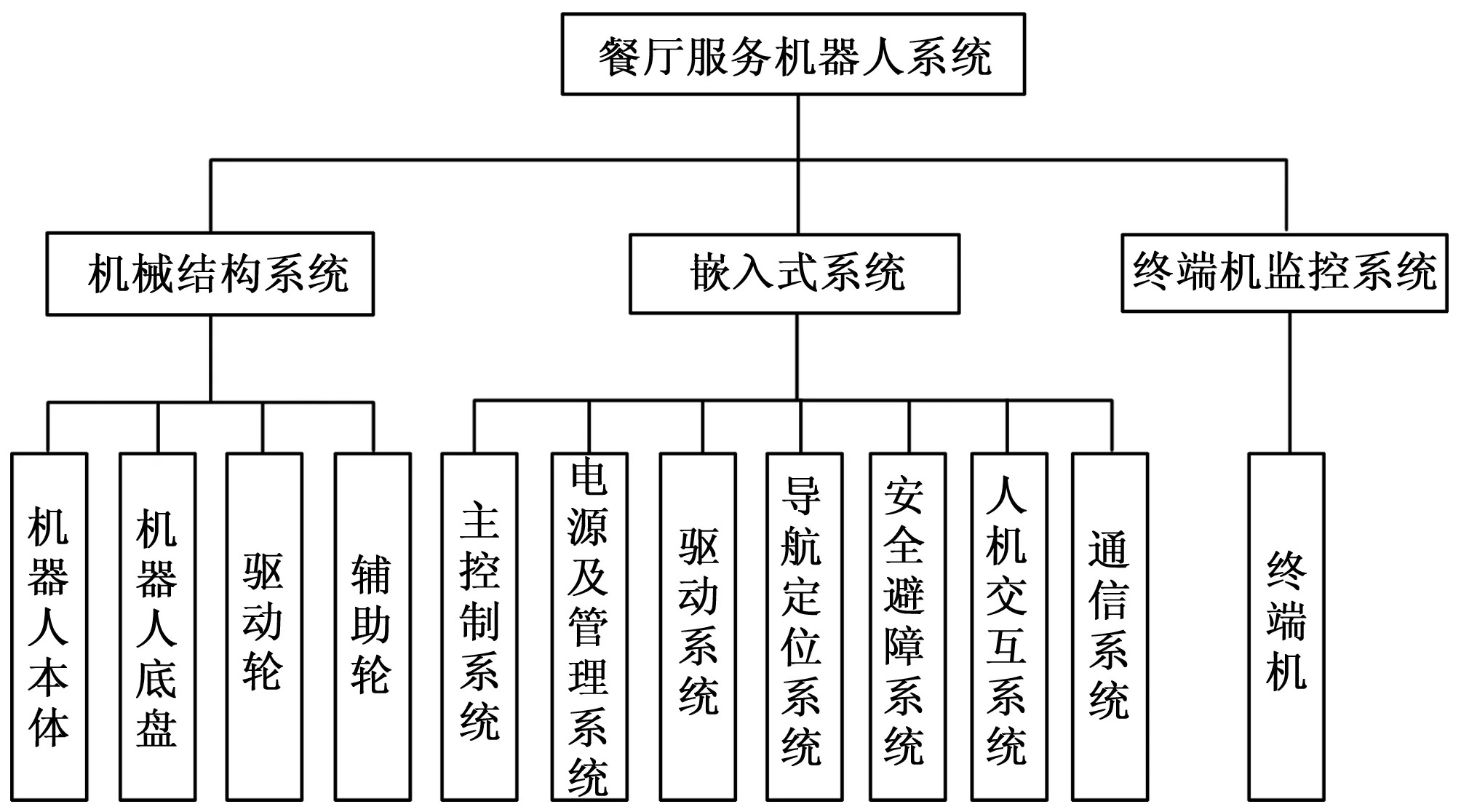
图1 机器人控制系统总体设计框图
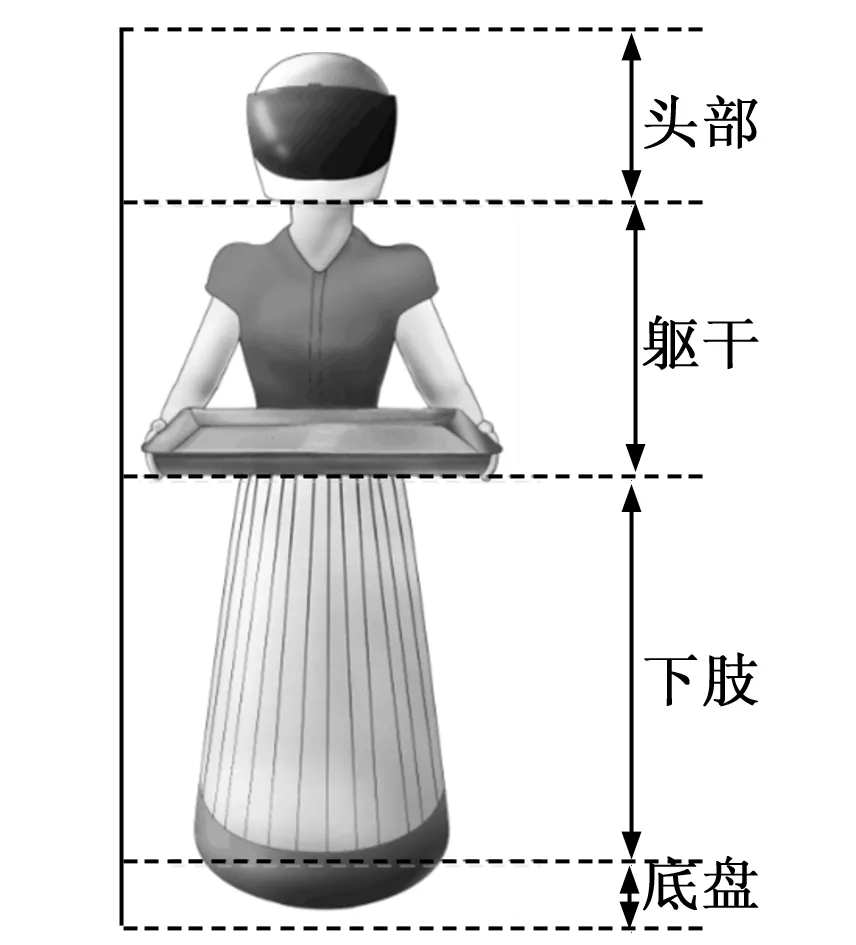
图2 机器人结构分布图
机器人结构分布如图2所示,机器人头部位置安装的器件有语音报警模块和LED显示模块;在躯干部分安装的器件有红外测距传感器、触摸屏模块以及开关、急停按钮;下肢部分为中空设计,便于布线;在底盘部位安装的器件有底盘模组、驱动模块、红外传感器模块、导航定位模块、主控板模块和电源模块等。
餐厅服务机器人控制系统总体结构框图如图3所示。
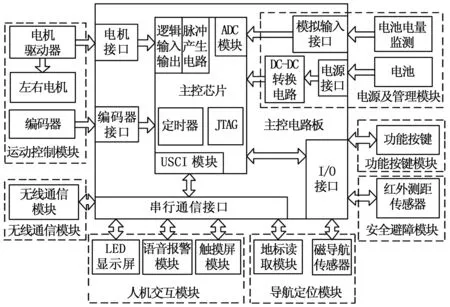
图3 机器人控制系统总体结构框图
控制系统由主控模块、电源及管理模块、运动控制模块、无线通信模块、导航定位模块、安全避障模块和人机交互模块组成[7]。主控模块以微控制器MSP430F5438为核心;电源及管理模块包括电池和电池电量监测模块,为其他模块提供可靠稳定的电能并及时反馈电量信息;运动控制模块包括电机、电机驱动器和编码器,接收主控制信号并驱动电机完成寻迹功能;无线通信模块用于实现机器人与终端机系统的无线通信;导航定位模块包括地标读取模块和磁导航传感器模块,实现机器人定位和导航;安全模块使用红外测距传感器,监测障碍物,保障安全;人机交互模块包括语音报警模块、LED显示模块及触摸屏模块,其中语音报警模块用于机器人遇到障碍物时语音报警以及送餐时对客户的温馨提示,LED显示模块可显示不同的图案或文字,作装饰使用,触摸屏模块用于显示目标餐桌编号及机器人运行状态信息。
2 控制系统硬件设计
2.1 主控模块设计
本文选用TI公司的MSP430F5438微控制器作为核心。该主控芯片处理数据能力强,是16位微控制器,主频最高可达18 MHz;超低功耗,工作电压2.2~3.6 V,适合工作于电池供电的系统;芯片端口资源丰富,I/O口数量众多,成本低,性价比高。
主控芯片资源分配图如图4所示,通过USCI串口通信模块UART模式实现异步串行通信和语音播报、LED及触摸屏显示、地标读取;通过带中断能力的P1和P2口接收红外传感器和编码器反馈信号;通过具有捕获/比较寄存器的16位定时器Timer_B产生电机驱动信号,驱动底盘小车电机;通过多路I/O口接收功能指令按键、磁导航传感器及电压等信息。
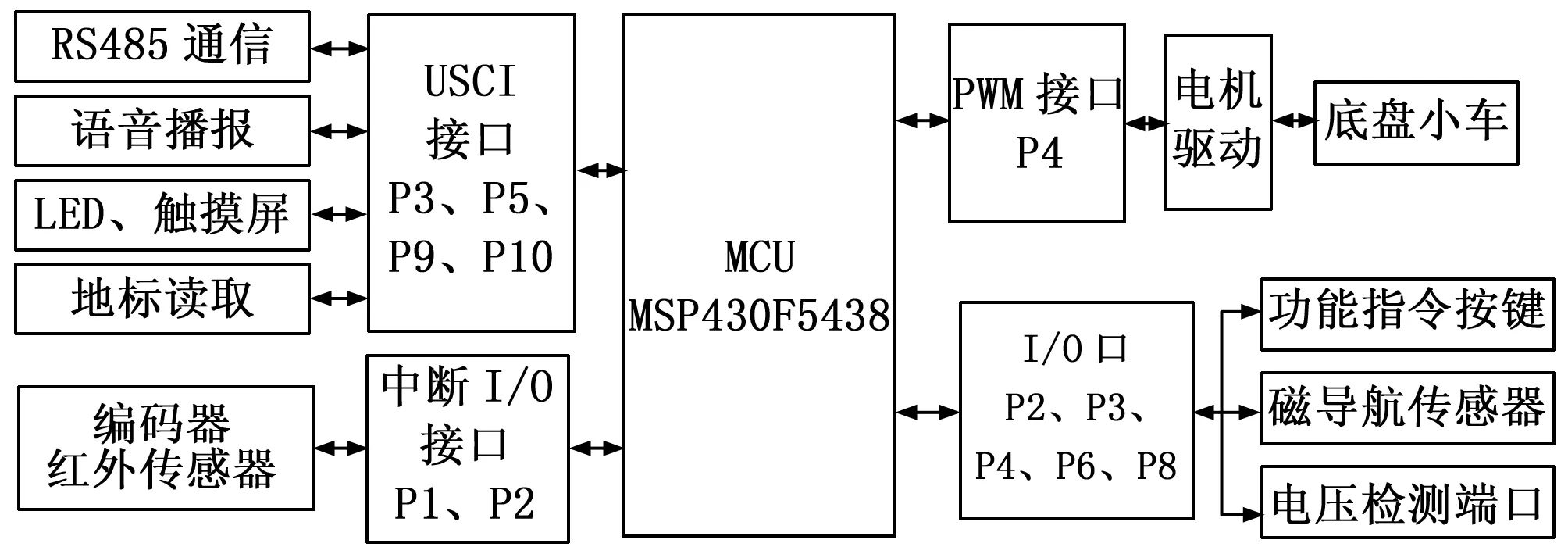
图4 主控芯片资源分配图
2.2 电源及管理模块设计
电源及管理模块电路电压分配如图5所示,由图可知,电源模块包括:电池、24 V稳压模块和电源转换模块。
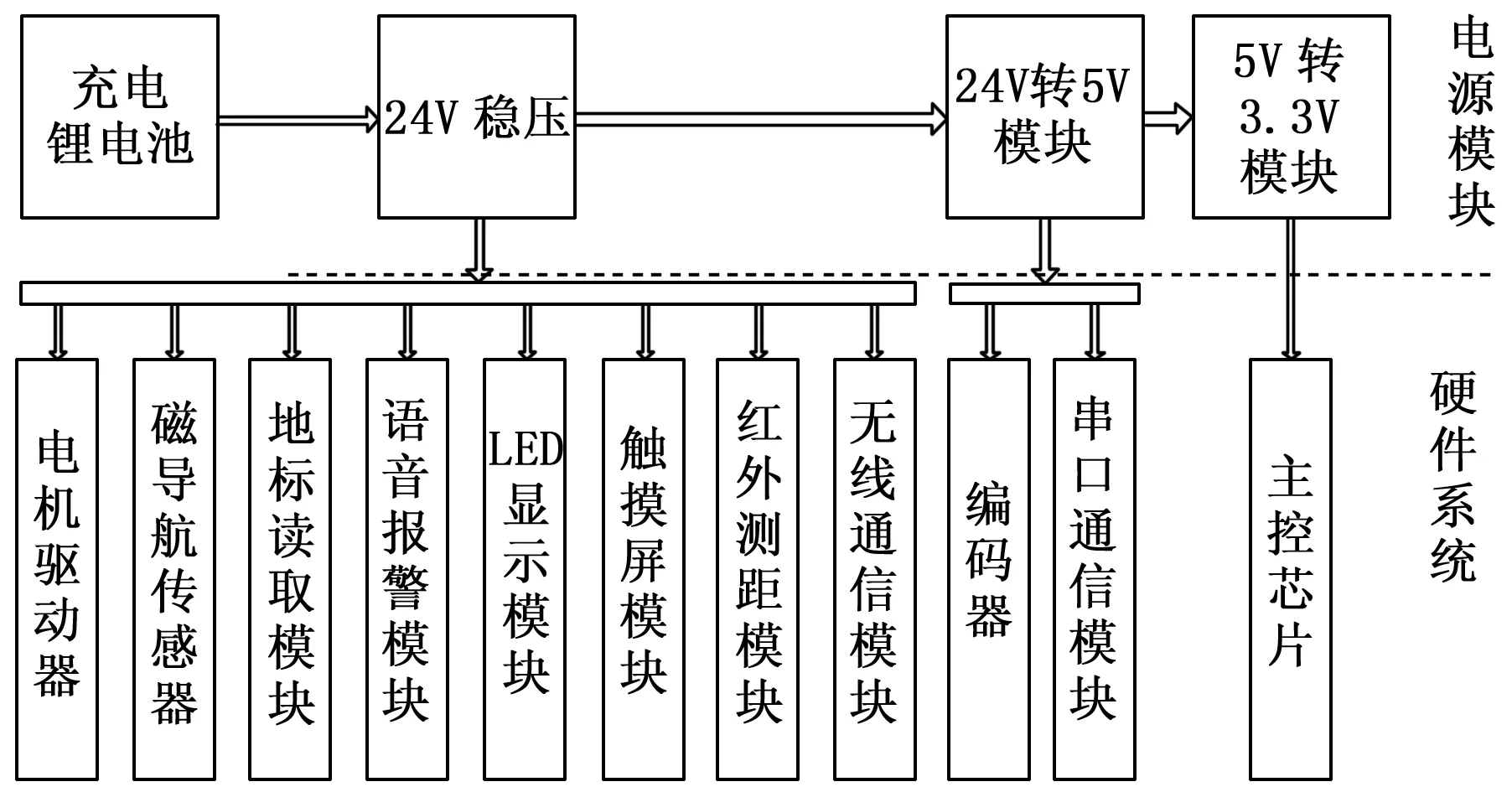
图5 控制系统电源模块电路图
对于主控芯片,供电电压为3.3 V,先采用二极管1N4007进行整流、稳压二极管1N4148进行稳压及旁路滤波电容进行滤波,然后采用1个隔离型DC/DC转换模块HZD10W-24S05将电池24 V转换为5 V,再由1块TPS7333芯片将5 V转换为3.3 V供给主控芯片。
电压检测模块,用于实时监测机器人电量信息,防止电量过低损伤电池。采用精密电阻分压,通过检测分压电阻两端电压计算电池电压,电源电压检测电路如图6所示。
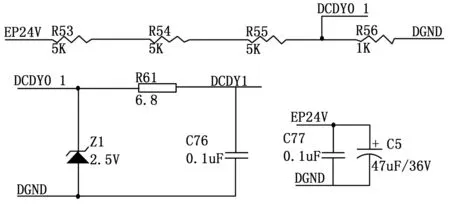
图6 电源电压检测电路
2.3 运动控制模块设计
运动控制模块主要包括:电机、电机驱动器和编码器。
直流电机结构简单,调速效果好,控制方式简单,选用直流电机驱动机器人运动。
餐厅服务机器人总质量为m=60 kg,最大运行速度为v=0.2 m/s,机器人最大加速度为a=1 m/s2,驱动轮与地面摩擦系数μ=0.2,驱动轮半径为r=0.05 m,机械传动效率η=0.8,则机器人运动功率为:
(1)
在启动过程中,还需要考虑静摩擦力,取静摩擦系数k=1.5,默认两个电机特性完全一致,则单个直流电机功率为:
(2)
单个直流电机所需转矩为:
T=fr=μmgr=0.2×60×9.8×0.05=5.88N·m
(3)
单个直流电机所需转速为:
(4)
经过市场调研,最终选用maxon公司的24 V、70 W、5 530 r/min、78.2 mN·m的RE36-118798直流电机和配套的103:1齿轮箱型以及maxon光电编码器HEDL5540。
直流电机采用脉宽调制控制,通过主控芯片MSP430F5438定时器Timer_B产生PWM控制信号,经过SN74HCT245芯片,电平由+3.3 V转换成+5 V信号输出,完成信号电平的转换后提供给DC24RT40BL-PC3型直流电机驱动器。通过调节PWM信号的占空比来控制直流电机正反转及旋转速度[8]。PWM输出接口电路如图7所示。

图7 PWM输出接口电路图
光电编码器集电极开路输出,所以其输出信号均需通过上拉电阻上拉至5 V,而主控芯片端口的输入电压最大不允许超过+3.6 V,所以必须对编码器信号进行电平转换,将+5 V电平信号转换为+3.3 V电平信号,编码器输入接口电路如图8所示。
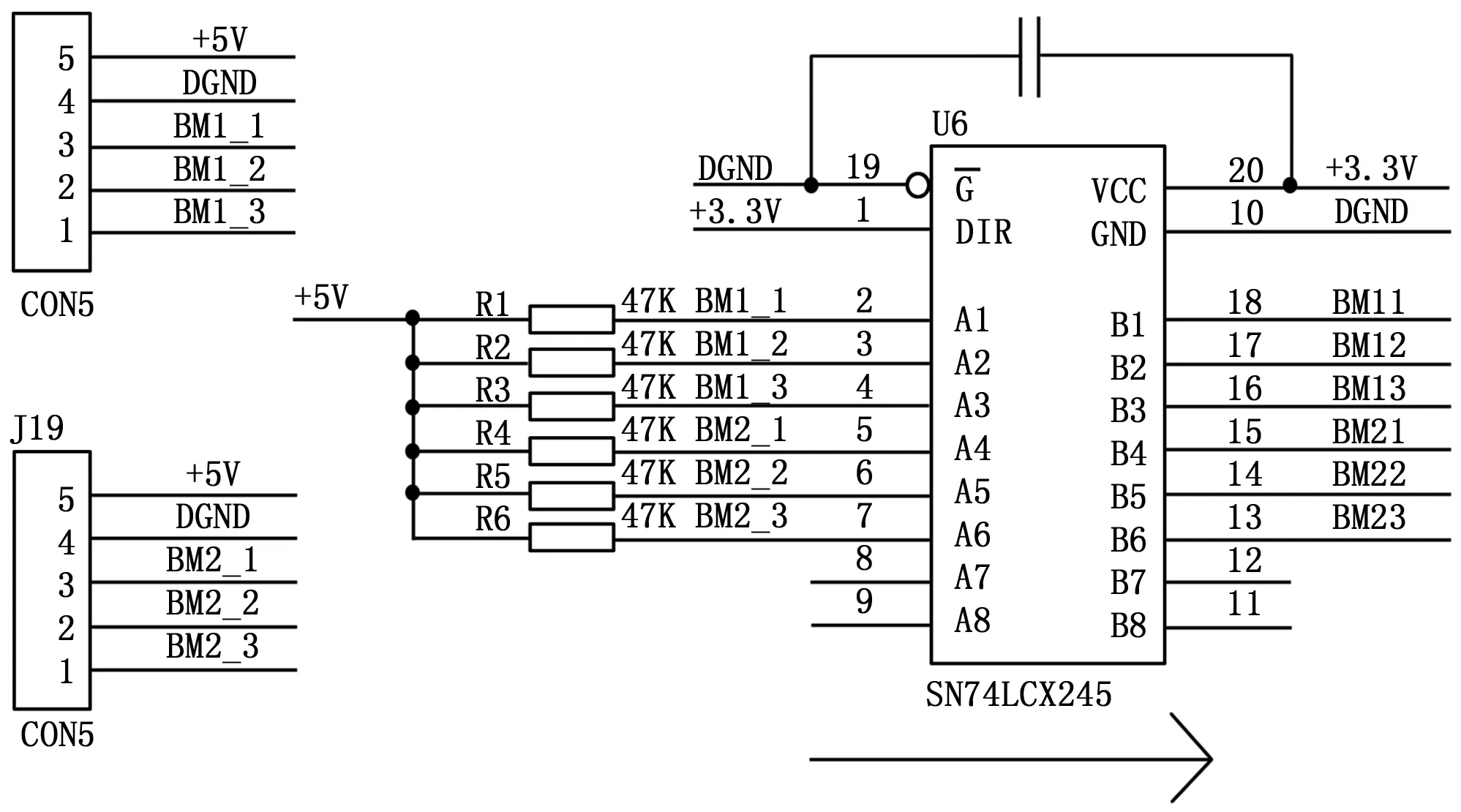
图8 编码器输入接口电路图
2.4 无线通信模块设计
无线通信模块电路如图9所示,通过主控芯片MSP4-30F5438的USCI_A串行接口以RS485协议通信,用MAX3485芯片实现电平转换,将主控芯片输出的TTL电平转换为RS485差分信号。

图9 RS485通信电路图
2.5 导航定位模块设计
导航定位模块主要由磁导航传感器和地标读取模块构成。本文选用深圳佳顺伟业科技有限公司的型号为CA-16型磁导航传感器,其供电电压为+24 V,输出为+5 V高低电平信号。因为有16路I/O信号,所以需要2片SN74HCT245进行转换,磁导航传感器信号电平转换电路如图10所示。地标读取模块选用北京芯拓未来机器人科技公司的CCF-RFID1传感器,感应距离0~5.5 cm,输出接口为RS232或RS485,设计的地标读取模块接口电路图与图9相同。
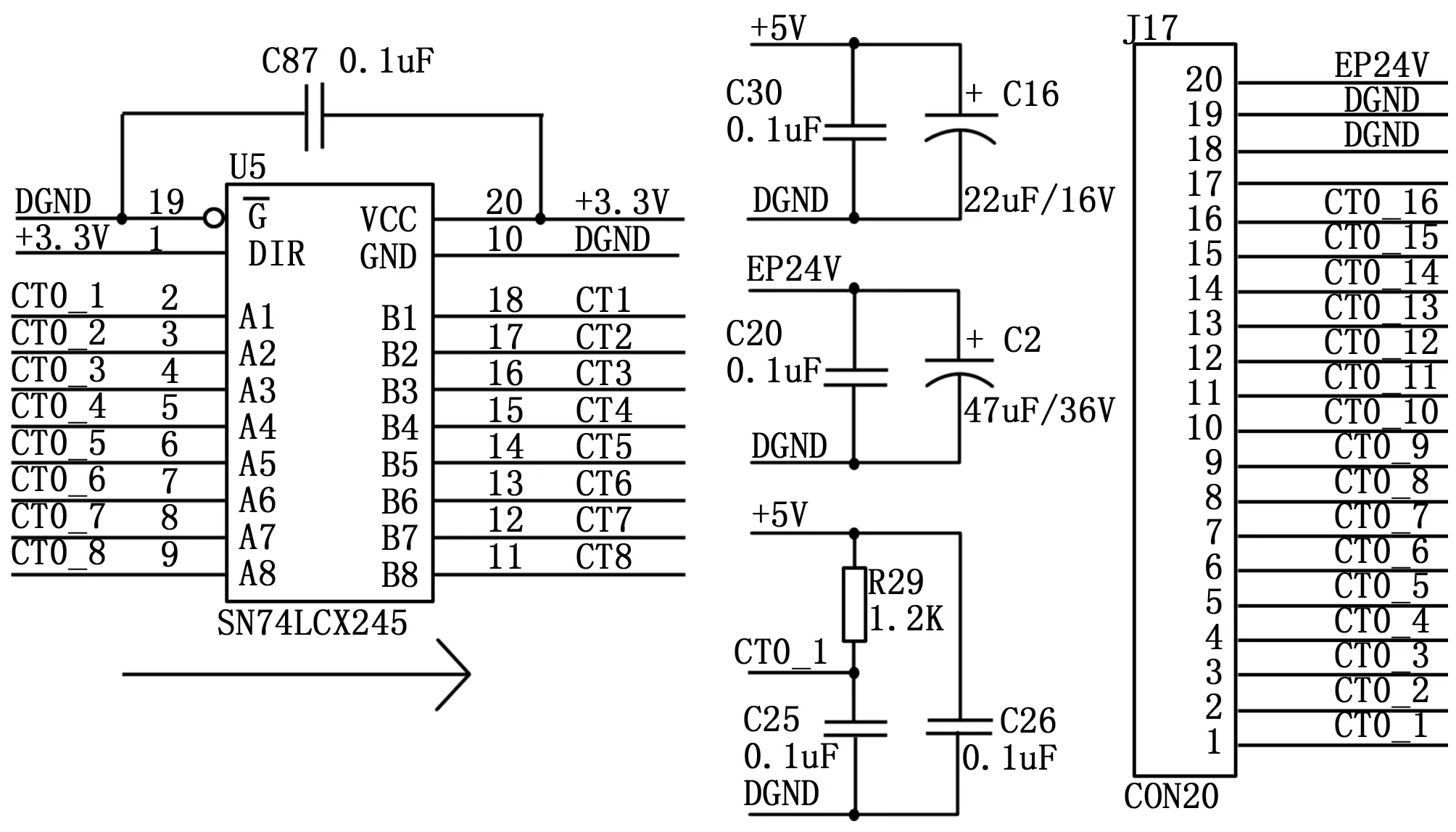
图10 磁导航传感器信号电平转换电路图
2.6 安全避障模块
安全避障模块选择欧姆龙E3Z-D62红外光电开关,+12~+24 V供电,有效检测范围为0~1 m。红外测距传感器用于检测机器人前方障碍物,保障就餐人员安全,安全避障模块接口电路图如图11所示。
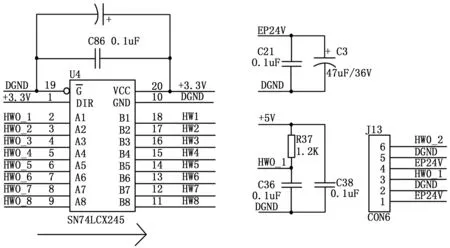
图11 安全避障模块接口电路图
2.7 人机交互模块
人机交互模块包括语音报警模块、LED显示模块及触摸屏模块,分别选用深圳艾智威科技有限公司的艾智威音乐报警器、深圳雨艺光电有限公司的LED显示模块和深圳显控自动化技术有限公司SK系列触摸屏。四个模块均采用串口通信,接口电路图与图10相同。
3 控制系统软件设计
机器人控制系统嵌入式软件主要针对微控制器MSP430F5438进行设计,基于IAR Embedded Workbench for MSP430,采用C语言开发,主要包括主函数、电机控制模块和无线通信模块。
主函数主要包括系统初始化和对子程序的调用等。初始化包括时钟、I/O端口、定时器、串口、AD采集等初始化。初始化完成后,进入while(1)循环,等待中断,即等待上位机发送的控制命令,当接收到控制命令后,开中断,解析命令并执行相应动作,执行完相应动作后继续等待下一个命令。主函数流程如图12所示。
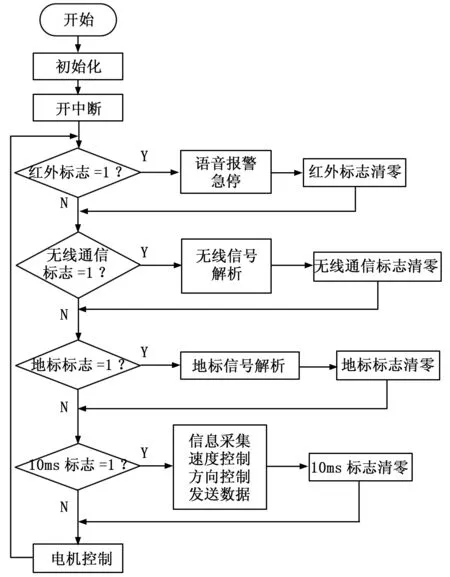
图12 主函数流程图
电机控制模块设计如图13所示,电机控制包括速度控制和方向控制。速度控制采用分区PID控制算法,周期为100 ms。方向控制利用磁导航传感器检测信息计算方向偏移量作为误差,采用PD控制算法,进行方向控制。
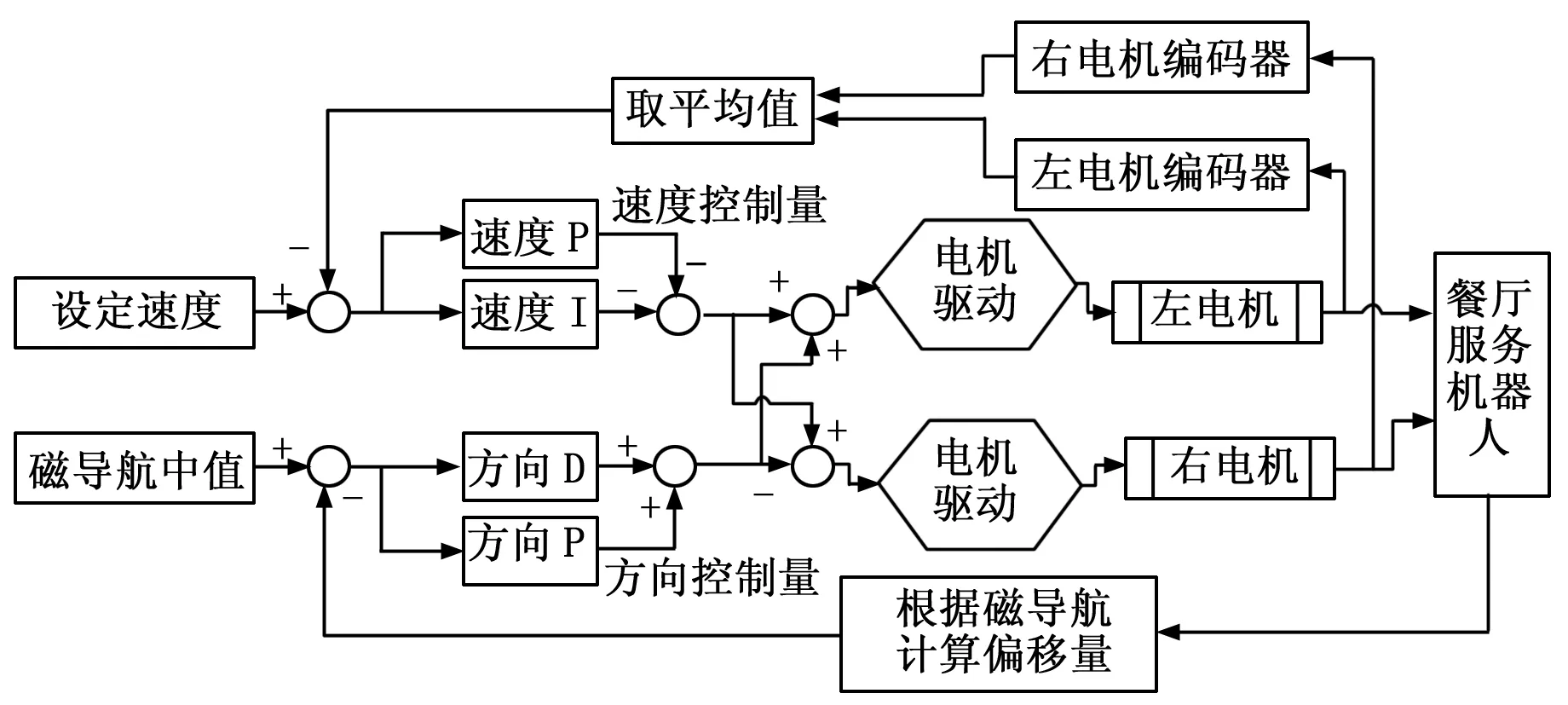
图13 电机控制模块设计框图
嵌入式系统无线通信包括接收终端机指令信号和向终端机发送状态信息。其中接收终端机指令信号通过无线信号中断触发,每10 ms定时发送一次,波特率115 200 bps。终端机向嵌入式系统下发指令包括送餐指令和启动/停止指令。控制命令通过数据帧的形式发送,格式为:“帧头+内容+帧尾”,餐厅服务机器人控制指令协议如表1所示。
机器人控制系统上位机监控软件基于Windows操作系统设计,主要包括餐厅服务机器人操作平台和机器人运行状态监控平台两个界面。其中餐厅服务机器人操作平台主要包括:选择餐桌编号、给机器人发送送餐指令以及停止、启动、监控等
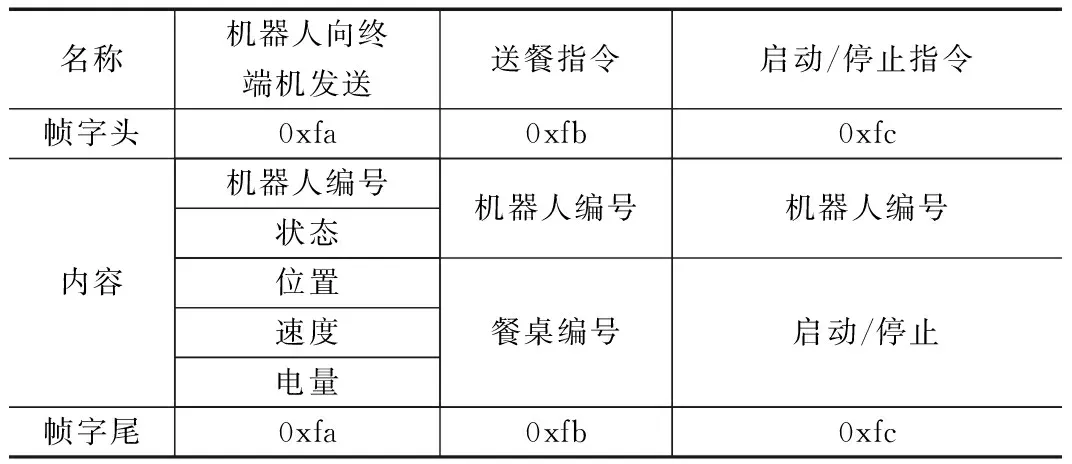
表1 控制命令协议
辅助按键。机器人运行状态监控平台用于监控机器人运动状态,主要包括:餐厅示意图、模拟机器人位置、机器人状态和机器人速度设置等。
4 控制系统实验
在实验中,通过上位机向机器人发送送餐命令“0xfb 0x01 0x00 0xfb”,机器人从起始位置出发,沿着磁条铺设的线路向目标餐桌移动。在运动过程中,遇到障碍物,机器人停止运动并语音播报“请您让一让”。当机器人到达目标餐桌,停止并语音播报“请享用美味”,按下确定按钮,机器人开始返回初始位置。在整个过程中,每隔10 ms机器人向终端机发送状态信息。
结果表明:机器人在所设计的控制系统控制下,能够准确地完成终端机下发的送餐任务并返回等待区,并及时向上位机反馈机器人状态信息。
5 结语
本文设计并实现了一种以微控制器MSP430F5438为核心的餐厅服务机器人控制系统,该控制系统采用模块化方法设计,包括:主控模块、电源及管理模块、运动控制模块、导航定位模块、安全避障模块、无线通信模块和人机交互模块等。各模块间相互配合,较好地完成了餐厅环境下机器人自主送餐的功能。实验结果表明所设计的控制系统,控制效果良好,具有显著的推广应用价值。
[1] Yamazaki K, Ueda R, Nozawa S, et al. Home-assistant robot for an aging society[J]. Proceedings of the IEEE, 2012, 100(8):2429-2441.
[2] 苏剑波. 服务型机器人的新时代[J]. 自动化博览, 2014 (7): 17-17.
[3] 张付有. 迎宾机器人控制系统的设计与开发[D]. 青岛:山东科技大学, 2013.
[4] 王田苗, 陶 永, 陈 阳. 服务机器人技术研究现状与发展趋势[J]. 中国科学: 信息科学, 2012, 42(9): 1049-1066.
[5] 宋章军. 服务机器人的研究现状与发展趋势[J]. 集成技术, 2012, 1(3):1-9.
[6] 朱世强, 刘松国. 我国机器人产业化发展战略探讨[A].全国先进制造装备与机器人技术高峰论坛[C]. 2008.
[7] 曹大卫, 王仁波. 基于ARM9的智能机器人控制系统的设计[J]. 电子质量, 2013(6):28-30.
[8] 林家泉, 程绪宇, 周贤民,等. 一种小型直流电机控制系统硬件设计方案[J]. 自动化与仪表, 2014, 29(11):73-76.
Design and Implementation of Control System for a Restaurant Service Robot
Cai Junjie1,Wu Yifei2, Xu Hangyu3, Zhang Wei4
(School of Automation, Nanjing University of Science and Technology, Nanjing 210094, China)
Through the analysis of demand about the restaurant service robot control system, an overall design scheme of the restaurant service robot control system with MCU MSP430F5438 as the core is proposed. The control system hardware circuit is designed by a modular design method, mainly including the main control module, power supply and management module, motor control module, wireless network communication module, navigation module, safe obstacle avoidance module and human-computer interaction module. The overall flow of the control system software is introduced and the embedded software of the control system are designed. Experiment results show that the designed control system applied to the restaurant service robot can achieve the function of meal delivery service and has good control effect, strong practicability and significant application value.
restaurant service robot;food delivering;control system
2016-04-07;
2016-06-21。
国家自然科学基金(61304136)。
蔡俊杰(1991-),男,湖北黄冈人,硕士研究生,主要从事机器人控制方向的研究。
1671-4598(2017)02-0077-04
10.16526/j.cnki.11-4762/tp.2017.02.021
TP311
A
