应用于感应电机矢量控制中的逆变器死区补偿
2017-03-21范波,徐翔
范 波,徐 翔
(1.河南科技大学 信息工程学院,河南 洛阳 471023;2.中信重工机械股份有限公司, 河南 洛阳 471039)
应用于感应电机矢量控制中的逆变器死区补偿
范 波1,2,徐 翔1
(1.河南科技大学 信息工程学院,河南 洛阳 471023;2.中信重工机械股份有限公司, 河南 洛阳 471039)
为了减小电压源型逆变器死区时间引起的输出电压畸变,对死区产生的原因进行分析,总结出三点原因,列出误差电压计算公式,最后运用到感应电机矢量控制中,对ua、ub、uc三项输入到逆变器中的电压进行补偿;该补偿策略首先计算控制周期内的误差时间,算出误差时间与电流的对应关系,最后将算出的周期TS内误差电压补偿到逆变器输入端上;通过补偿误差电压,降低了电流谐波对控制系统的影响,同时电网侧的能量利用率得到了提高;实验结果表明,该策略对电流波形起到了改善作用。
电压源型逆变器;死区补偿;电流谐波
0 引言
无速度传感器矢量控制使异步电机可以像直流电机一样达到高控制精度,所以现在已经广泛应用于异步电机控制中,磁链估算的准确性是控制精度的前提。在多种矢量控制算法中,感应电动势的积分都直接或间接的影响了磁链的估算[1],而感应电动势又依赖于定子电压测量的准确性,考虑到成本及精度的原因,采用矢量脉冲宽度调制(SVPWM)模块的输出电压代替定子电压[2]。
空间矢量脉冲宽度调制电压源型逆变器低频和轻载时的死区效应使电机相电压和相电流畸变、转速和转矩脉动等问题,导致系统性能降低[3]。为提高系统性能,对死区进行研究是非常必要的。
目前国内提出的死区补偿方法主要分为前馈方式和反馈方式两种。反馈方式需要借助光耦捕获脉宽信号,用DSP的脉宽捕获单元可以得到脉宽宽度[4],这种方式将电压整形成了标准方波,以及DSP检测存在滞后,A/D转换精度等原因,导致精度难以得到提升。前馈方式基于方波和梯形波模型,前者容易造成电流钳位[5],后者需要计算电流相位角[6]。另外还有人工检测的方法[7],工作量巨大,不适合规模化。
文献[8]把管压降分为两部分:一部分随电流变化,另一部分为阈值电压。文献[9]计算误差电压时只考虑了IGBT的驱动延时、开关延时及器件延时。文献[10]提出了通过人工检测得到不同电流下的输出电压延时,然而需要对大量数据进行繁重的手工操作,在工业生产中不适用。文献[11]将非线性误差电压值记录在查找表里,只是简单的测量记录,对于多频率的变频器需要多次测量。
1 逆变器非线性原理分析
1.1 计算误差电压

图1 带有电机负载的三相逆变器结构
图1为典型的三相电压源型电压驱动逆变器系统。逆变器中各相输出电压由开关管控制,各相两个开关管不能同时导通,否则可能损坏变压器,造成电网侧不稳定短路并跳闸,影响工业用电安全。为了防止逆变器单项同时导通,引入死区时间Td。但是这样导致一部分电网能量没有传给电机,电机达不到良好性能,影响工业生产效率,为此便对死区时间进行补偿。为了便于死区时间的分析,首先约定电流流入电机的方向为正,流出电机的方向为负。以A相为例:当A相电流IA>0时,A相输出电压Ua由A相桥臂上管T1控制;当A相电流IA<0时,A相输出电压Ua由A相桥臂下管T2控制。由于死区时间的存在,逆变器在死区时间内输出电压的大小不受开关管控制,由输出电流的方向来决定。
图2为A相电压误差波形图。图中SAP*表示A相上管理想PWM开通关断信号,是Vdc经过PWM模块产生的。SAp和SAn分别为管理A相上下管的PWM控制信号,Td为死区时间。VAN为输出的电压脉冲波形,虚线为理想值,粗实线为实际值。

图2 A相电压误差波形图
当IA>0时,逆变器输入输出的误差电压为:
(1)
当IA<0时,逆变器输入输出的误差电压为:
(2)
两式可以合并成:
(3)
其中总输出延时为:ttotal=Td+tturn-on-tturn-off。
可以通过式(3)计算电压误差。tturn-on为开通延时时间,tturn-off为关断延时时间,v*为本算法所采取的直流激励电压,fPWM为所采用直流激励的频率,sign(i)取±1,当电流方向为正时取+1,当电流方向为负时取-1。IGBT正向导通压降与电流的对应关系Vs-i曲线和二极管正向导通压降与电流的对应关系Vd-i曲线可以由器件的手册或人工测量得到[12]。Vdc可通过测量得到,电机运行中变化较小,通常认为常量。如果要提高精确度,可以将Vdc随电流的变化过程也考虑进去,但是这样会增加检测难度和成本。
1.2 死区效应分析
图3为A相电流ia>0时的电路图。其中SAp打开,SAn关闭,电流流过SAn的二极管与流过SAp的电流汇合形成A相电流。

图3 A相电路结构
根据分析可以得出导致逆变器输出电压误差的原因分为三种[13-17]:
1)IGBT的本身特性,其正向导通压降VS和二极管导通压降Vd,二者与导通的电压和温度有关。
2)死区时间造成的误差。死区造成的误差电压随着载波频率的变化而变化。
3)开通、关断延时引入的误差Eturn。包括控制信号传递延时tpd,开关延时tsd和IGBT正向电压上升、下降时间tr和tf,由于电压成斜坡上升或者下降,其等效延时为上升、下降时间的一半。
以上三种因素构成了主要的逆变器非线性电压误差。
2 死区补偿


图4 具有死区补偿的感应电机矢量控制框图
误差电压的估计值和真实值之间的关系为:
(4)

(5)
将式(3)代入式(5)得总延时时间:
(6)
由于采用直流激励,v*相对于Vdc很小,Vs的值接近Vd,所以Vs-Vd接近于0,由于RS1和RS2是采用同一电流进行两次测量得到的真实电阻值,所以RS1-RS2很小,故忽略(Vs-Vd)·v*/Vdc和RS1-RS2项,d为占空比,d=vAN/Vdc。
理想输出电压与实际输出电压在周期TS内的误差电压可以表示为:
(7)
通过以上分析,在静止坐标系下可以得到三相误差电压,最终可以补偿到变频器的输入端。
如图4所示,试验中,根据计算得到的三相静止轴系中的误差电压与实际输入到逆变器中的三相静止坐标系下的电压相加达到补偿效果。
该补偿方法适用于电机矢量控制中,其特点是测量过程中不引入电机定子电阻项,不会对测量结果造成干扰。测量过程可以通过控制器自行实现,不会产生人为测量误差。
3 实验
实验中,异步电机额定功率2 238 W,额定电压220 V,额定频率50 Hz,定子电阻0.435 Ω,转子电阻0.816 Ω,转动惯量0.089 kg·m2,摩擦系数0.005 N·m·s,漏感0.002 H,互感0.069 31 H,电机极对数2,采用simulink仿真,死区时间设定为5 μs,开关频率为5 kHz。电机期望转速设为1 400 rpm。

图5 采用本文所述方法补偿后的A项定子电流对比图
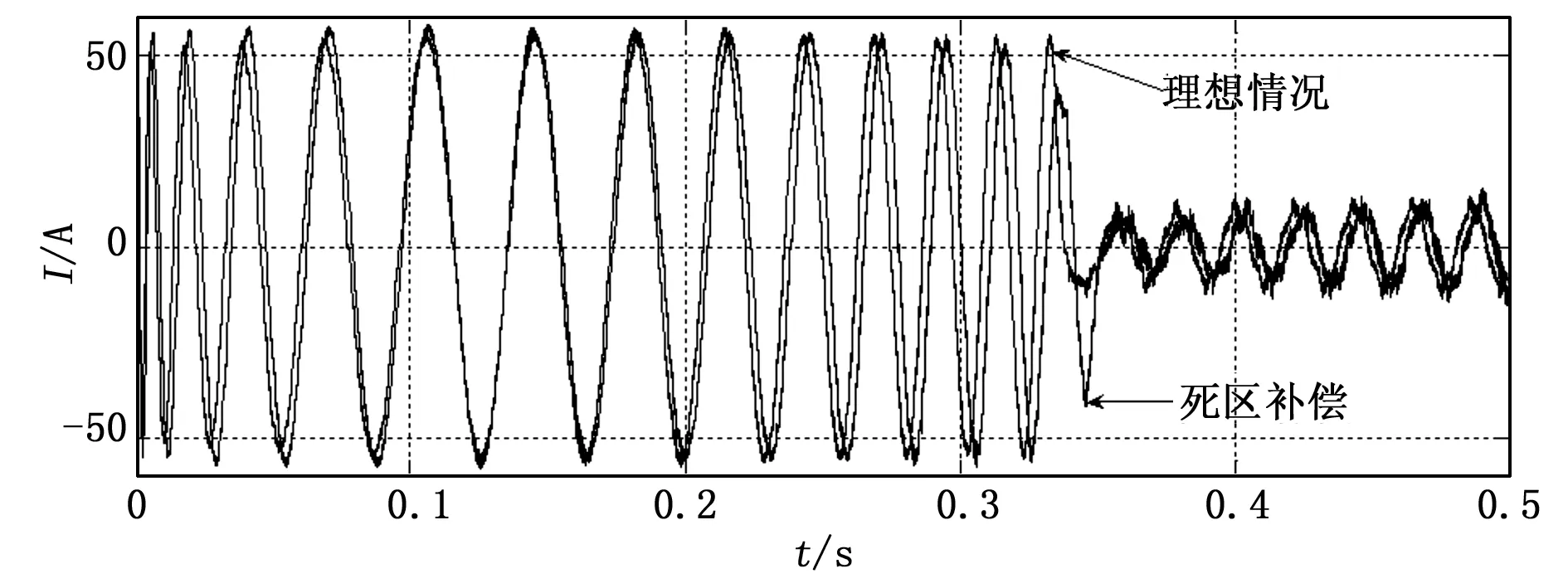
图6 采用反馈方式补偿后的A相定子电流对比图
由图中可知电机在0.35秒左右转速到达稳态,电机启动时,电流波动较大,图5显示采用本文的方法补偿后得到的定子A相电流与理想情况下的定子电流几乎吻合,图6所采用的反馈补偿方式与理想定子A相电流存在一定差距。

图7 没有死区补偿的A项电流

图8 采用本文所述方法补偿后的A项电流

图9 采用反馈方式补偿后的A项电流
图7~9分别为死区补偿前后电流的谐波含量示意图,基频为50 Hz,取A项电流0.4秒稳定之后的一个周期进行FFT谐波分析,死区补偿后2、3次谐波含量降低,THD也明显减小。图8与图9比较可知,采用本文所述方法比反馈补偿效果明显。死区补偿后,谐波含量减小,电网侧能量利用率提升。实验在Matlab平台搭建进行,实验效果良好。
4 结论
本文将死区延时的算法应用到了异步电机的矢量控制中,该算法不用考虑电流的方向问题,通过对两个随时间由0逐渐增大的不同频率的电流自动检测得到不同电流值对应的电压误差估计值与真实值之间的关系,两次测量值相减后消去估算电阻并计算每一个电流值对应的ttotal。电流过零时误差电压不能用式(3)表示,可以近似为线性关系,延迟时间在零点被强制在0,因此误差时间可以中心对称到第三象限,最后在Matlab平台上搭建模型,实现了算法的可行性验证。
[1]PellegrinoG,BoJoiRI,GuglielmiP,etal.Accurateinvertererrorcompensationandrelatedselfcommissioningschemeinsensorlessinductionmotordrives[J].IEEETransactionsonIndustryApplications,2010,46(5):1970-1978.
[2]HoltzJ,JuntaoQ.Sensorlessvectorcontrolofinductionmotorsatverylowspeedusinganonlinearinvertermodelandparameteridentification[J].IEEETransactionsonIndustryApplications,2002,38(4):1087-1095.
[3] 吴茂刚,赵荣祥.矢量控制永磁同步电动机的转矩脉动分析[J].电工技术学报,2007,22(2):9-14.
[4] 刘军锋,李叶松.死区对电压型逆变器输出误差的影响及其补偿[J].电工技术学报,2007,22(5): 117-122.
[5]UrasakiN,etal.Dead-timecompensationstrategyforpermanentmagnetsynchronousmotordrivetakingzero-currentclampandparasiticcapacitanceeffectsintoaccount[J].IEEProceedings-ElectricPowerApplications,2005,152(4):845-853.
[6]YongsoonP.Seung-KiS,Anovelmethodutilizingtrapezoidalvoltagetocompensateforinverternonlinearity[J].IEEETransactionsonPowerElectronics,2012,27(12):4837-4846.
[7]SaltDE,etal.CompensationofInverterNonlinearDistortionEffectsforSignal-Injection-BasedSensorlessControl[J].IEEETransactionsonIndustryApplications,2011,47(5):2084-2092.
[8] 杨立永,陈智刚,陈为奇,等.逆变器输出电压模型及新型死区补偿方法[J].电工技术学报,2012,27(1):182-187.
[9] 栋 良,贺益康.交流伺服系统逆变器死区效应分析与补偿新方法[J].中国电机工程学报,2008,28(21):46-50.
[10]Seilmeier,WolzMC,PiepenbreierB.Modellingandmodelbasedcompensationofnon—idealcharacteristicsoftwo-levelvoltagesourceinvertersfordrivecontrolapplication[A].1stInternationalElectricDrivesProductionConference(EDPC)[C].2011.
[11]BojoiIR,etal.Self-commissioningofinverternonlineareffectsinACdrives[A].IEEEInternationalEnergyConferenceandExhibition(ENERGYCON)[C].2012.
[12]ShenGT,WangK,YaoWX,etal.DCbiasedstimulationmethodforinductionmotorparametersidentificationatstandstillwithoutinverternonlinearitycompensation[A].ProceedingsofIEEEEnergyConversionCongressandExposition(ECCE)[C].2013.P:5123-5130.
[13]WangH,PeiX,ChenY,etal.Anadaptivedead-timecompensationmethodforsinusoidalPWM-controlledvoltagesourceinverterwithoutputLCfilter[A].ProceedingsofIEEEEnergyConversionCongressandExposition(ECCE)[C]. 2011:778-785.
[14]WangX,ChenX,TianJ,etal.AstudyofGTO'sdeadzonecompensationusedforA± 500kvarstaticVARgenerator[M].AutomationofElectricPowerSystemsPress, 2001:38-30,63.
[15]WangX,ZhaoY,ZhangH,etal.ResearchofestimatingrotorpositionofIPMSMbasedonhighfrequencysignalinjectionconsideringtheinverternonlinear[J].IEEEComputerSociety, 2011:1-4.
[16]YooSJ,ParkJB,ChoiYH.Decentralizedadaptivestabilizationofinterconnectednonlinearsystemswithunknownnon-symmetricdead-zoneinputs[J].InternationalFederationofAutomaticControl(IFAC). 2009:436-443.
[17]MaoX,AyyanarR,JainAK.Deadtimeeffectintwo-levelspacevectorPWMvoltagesourceinverterswithlargecurrentripple[Z].InstituteofElectricalandElectronicsEngineersInc.,2011: 679-684.
[18]YangB,WuJ,LiW,etal.Onlineadaptivedead-timeeliminationmethodforPWMvoltagesourceinverters[M].ChineseMachinePress,2011:45-52.
[19]YanQ.Theanalysisanddesignofthree-phasestaticinverterdeadbandeffectandharmonicsuppression[Z].TransTechPublicationsLtd. ,2014:293-296.
[20]ShinSM,ParkRK,LeeBK.CompensationPWMtechniqueforextendedoutputvoltagerangeinthree-phaseVSIusingthreeshuntresistors[M].KoreanInstituteofElectricalEngineers,2014: 1324-1331.
Dead Zone Compensation Applied to Induction Motor Vector Control in Inverter
Fan Bo1,2,Xu Xiang1
(1.College of Electrical Engineering, Henan University of Science and Technology, Luoyang 471023, China;2.CITIC Heavy Industries Co., Ltd., Luoyang 471039, China)
In order to reduce the voltage source type inverter output voltage distortion caused by dead-time, analyze the dead zone reason, Summed up the three reasons, The calculation formula of error voltage is listed to applied to induction motor vector control, compensate the inverter voltage which the three of voltageua,ub,ucinput into. The compensation strategy firstly calculates the error time in control cycle, calculate the error of a corresponding relationship with the current time, finally to calculate the error voltage compensation within the periodTSto the inverter input. By compensationing error voltage, we reduced the influence of the current harmonics to the control system, improved the energy utilization of the power grid side. The experimental results show that the strategy have played an important role to improve current waveform.
voltage source inverter; dead-time compensation; current harmonic
2016-04-07;
2016-06-21。
范 波(1975-),男,河南洛阳人,副教授,硕士研究生导师,主要从事大容量功率变换与高压交流调速系统方向的研究。
1671-4598(2017)02-0070-04
10.16526/j.cnki.11-4762/tp.2017.02.019
TM346+.2
A
