倾转定翼无人机姿态控制系统设计
2017-03-21王廷廷钱承山张永宏毛海强朱灵龙
王廷廷, 钱承山,张永宏,毛海强,朱灵龙
(1.南京信息工程大学 信息与控制学院,南京 210044; 2.南京信息工程大学 计算机与软件学院,南京 210044)
倾转定翼无人机姿态控制系统设计
王廷廷1, 钱承山2,张永宏1,毛海强1,朱灵龙1
(1.南京信息工程大学 信息与控制学院,南京 210044; 2.南京信息工程大学 计算机与软件学院,南京 210044)
所研究对象为四旋翼倾转定翼无人机(Quad Tilt Wing-Unmanned Aerial Vehicle, QTW-UAV),首先对QTW-UAV的直升机模式进行动力学特性分析,建立其滚转运动数学模型,然后设计了基于模型参考的PID自适应控制器,在传统PID控制方法的基础上融合自适应控制算法,给出PID参数自整定率,实现了QTW-UAV姿态角的自适应控制;仿真结果表明,设计的控制器具有良好的稳态和跟踪性能,实现了QTW-UAV姿态稳定控制。
倾转定翼;无人机;PID参数整定;模型参考自适应控制
0 引言
无人机由于其具有多功能性、隐蔽性等特点,近年来引起了人们的广泛关注。尤其是倾转翼无人机,因其兼具垂直起降、定点悬浮、高速巡航的能力,世界各航空大国、强国都对其展开了深入研究。欧美各国相继开发了XV-3,XV-15,V-22,BA-609,EagleEye等型号倾转旋翼飞机。美国于1998年完成第一架倾转旋翼无人机的试飞,即大家所熟知的“鹰眼”。对于倾转定翼机,日本千叶大学采用LQI控制方法,对其垂直起降模式进行控制,取得良好控制效果[1];土耳其萨班哲大学自行研制了SUAVI样机,给出机身设计方案,并做了风洞试验,采用PID经典控制算法,进行多级控制[2]。
本文所研究的倾转定翼无人机QTW-UAV兼具旋翼机及固定翼机两种飞行器的优点,同时也克服了倾转旋翼机的一部分缺点,采用了倾转定翼结构,更大化的利用气动效率;改变双旋翼为四旋翼结构,提升力比较均匀,在直升机模式下具有更高的稳定性[3]。
目前国内关于倾转翼机的姿态控制研究较多,大多集中在非线性领域,但由于非线性控制对模型准确性有较强的依赖,因此在模型误差存在的条件下,PID控制更加实用[4]。在飞行过程中环境有剧烈变化,出现扰动时,需要鲁棒性更强的控制方法。因此本文根据以上两点,并结合无人机的特点,设计了基于模型参考的PID自适应控制器[5-7],结合模型参考自适应算法,给出PD参数的自整定率[8]。当初始误差较大时,避免了过大初始力矩输出,并且使系统快速收敛到稳定状态。最后通过数值仿真实验,验证了所设计的控制器的性能。
1 系统建模
QTW-UAV搭载4个主驱动电机,两对带有副翼的机翼及一套倾转机构。机翼随着倾转机构的倾转而改变其与机体轴的夹角,实现3种飞行模式的切换,3种模式即直升机飞行模式、过渡飞行模式和定翼机飞行模式,具体转换过程如图1所示。
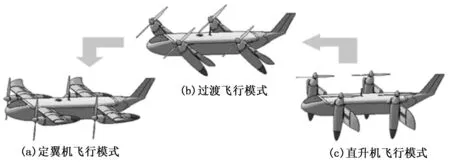
图1 QTW-UAV的三种基本飞行模式
当机翼与机体轴夹角亦即倾转角呈近90°时,QTW-UAV处于直升机飞行模式,如图1(a)所示,该模式是最为基本的一种飞行模式,此时QTW-UAV类似于四旋翼直升机,可以垂直起降,也可以绕某一点做旋转运动;当倾转角呈近0°时,QTW-UAV处于定翼机飞行模式,如图1(c)所示,该模式下QTW-UAV可做高速巡航飞行;当倾转角介于0°~90°之间时,QTW-UAV处于转换过渡飞行模式,如图1(b)所示。
在直升机模式飞行时,电机和机翼垂直向上,旋翼轴向上,旋翼转动产生的拉力可以使无人机能够垂直起降,以及在空中定点悬浮,如图2所示。

图2 QTW-UAV直升机飞行模式
在直升机模式下飞行时,系统的动力来自于4个旋翼产生的拉力,通过调节电机转速的大小可以改变旋翼的拉力,进而改变无人机的各个轴方向的力矩。此时飞行器的移动速度较低、倾斜角较小,因此可以对模型进行线性化并忽视各个自由度之间的耦合,把各个自由度分别考虑成单输入单输出的系统来分别建立模型[9]。
1.1 坐标系建立
首先建立两个基本坐标系:地球坐标系Fi和机体坐标系Fb,如图3所示[1]。其中Fi的坐标原点为地球表面一点,Xi轴的正方向为北方,Yi轴的正方向为东方,Zi轴的正方向为地心引力的方向;Fb的原点为机体中心,Xb轴的正方向表示机体的前方,Yb轴的正方向表示机体的右方,Zb轴的正方向表示机体垂直向下的方向。用欧拉角来表示姿态变量,地球坐标系Fi中φ表示滚转角,θ表示俯仰角,ψ表示偏航角,机体坐标系中p、q、r分别表示三轴角速度。

图3 坐标系示意图
QTW-UAV在直升机模式下,其运动主要包括Xb、Yb、Zb三个方向的平动以及以这3个坐标轴为旋转轴的滚转(Roll)、俯仰(Pitch)、偏航(Yaw)旋转运动。无人机的滚转运动由电机R1、R4和R2、R3的转速不同实现;俯仰运动由R1、R2和R3、R4的转速不同实现;偏航运动由各个螺旋桨产生的气流和各个副翼所引起的滑流效应实现。下面主要建立QTW-UAV系统的滚转运动模型。
1.2 Roll数学模型
QTW的滚转运动是由4个电机的转速不同来控制,机体中心滚转力矩由各个电机的拉力不同产生。表达式如(1)所示:
(1)
其中:M为滚转力矩,f1~f4为每个电机的实际拉力,L为电机的中心到机体的距离,为偏航角,Ψ为方便研究滚转运动,Ψ设为一固定值,因此LsinΨ是常量,可由电机的几何位置计算得到。假设角速率和力矩之间的传递函数是一阶形式,得到滚转角速率的表达式如式(2):
(2)
式中,P为滚转角速率p的拉式变换形式,τ为时间常数,F1~F4为f1~f4的拉氏变换形式。设Roll的控制输入为δφ,在悬浮状态下,每个电机的推力由控制输入和电机参数决定,表达为:F1=K1δφ,F2=K2δφ,F3=K3δφ,F4=K4δφ。带入式(2)中得:
(3)
其中:K1~K4为常量参数,由电机的特性来决定。

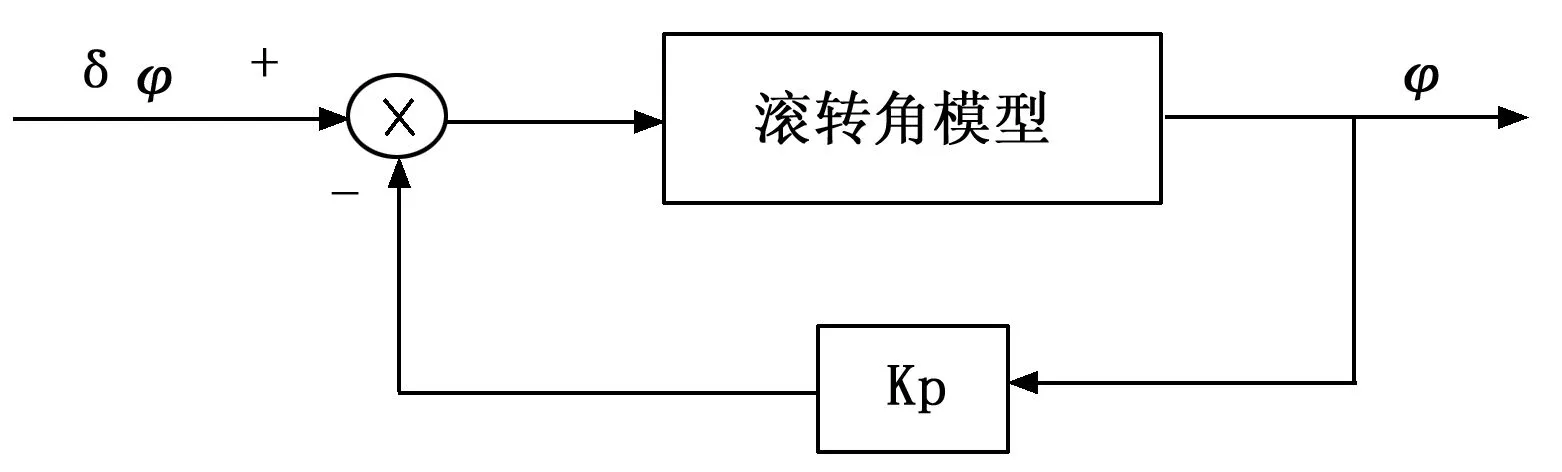
图4 增稳控制结构图
在角速率的模型上加入一个积分环节,最后得到滚转角的模型为:
(4)
按照上述步骤并结合文献[9],可得到Yaw、Pitch数学模型分别为:
(5)
(6)
2 姿态控制器设计
由于QTW在垂直起降阶段的滚转角、俯仰角、偏转角的模型类似,所以本文只以滚转角为例来设计控制器。将(4)式转换成状态空间方程的形式:

(7)

设定控制对象的参考模型为:
(8)
其中:Am、Bm、Cm为设定的模型参数。参考模型与被控对象的状态误差为:
(9)
对其求导,并将式(7)和(8)代入,解得系统误差为:
(10)
为了实现被控对象对参考模型更好的跟踪,引入被控对象与参考模型的输出误差:
(11)
设定总误差为:e=[e1e2]T,结合式(7)~(9)、(11)得到误差系统的状态方程:
(12)
其中:
通过加入PD控制器调节误差,使系统误差趋向于零,实现系统跟踪参考模型,逐步稳定。PD控制算法表达式:
(13)
其中:Kp、Kd为控制器的可调参数。本文根据文献[6]中提出的一种模型参考自适应控制方法,并结合PID控制器,推出PD参数自整定率,该控制器与典型的PID控制器相比,显著的提高了系统的动态响应性能,并且控制系统能够快速收敛,具体控制策略如式(14):
(14)
其中:Δkp=kp-kp*,Δkd=kd-kd*;kp*、kd*为可调参数初始值;系数γ>0,α1>0,α2>0。通过反馈的误差值调整Kp、Kd参数值,实时调节控制器,使控制系统更加稳定的跟踪参考模型系统。图5为滚转角控制系统框图。

图5 滚转角控制系统框图
3 仿真结果与分析
采用Matlab辨识工具ident对实验获得的QTW飞行器输入和输出时域数据进行预处理确定模型的参数为:ap1=98.82,ap2=23.2,bp1=28.3。设定PD控制器初始参数为Kp=[-16 8 0.8 -0.12],Kd=[2 2 2 0.01]。图6、图7分别是PD控制参数Kp、Kd变化曲线图。
图8是滚转角控制系统在阶跃输入下的系统响应曲线,分别是滚转角角度和控制输入的变化。从图中可以看出,系统输出可以快速跟踪到系统输入,从放大图看超调约为1%,调节时间约为1.2s。图9显示了实际模型的滚转角、滚转角速度、滚转角加速度的三个状态与参考模型的3个状态的对比。从图中可以看出,实际模型可以稳定地跟踪到参考模型的状态,两者状态大致保持一致。
4 总结
本文针对倾转定翼无人机QTW-UAV的直升机模式,
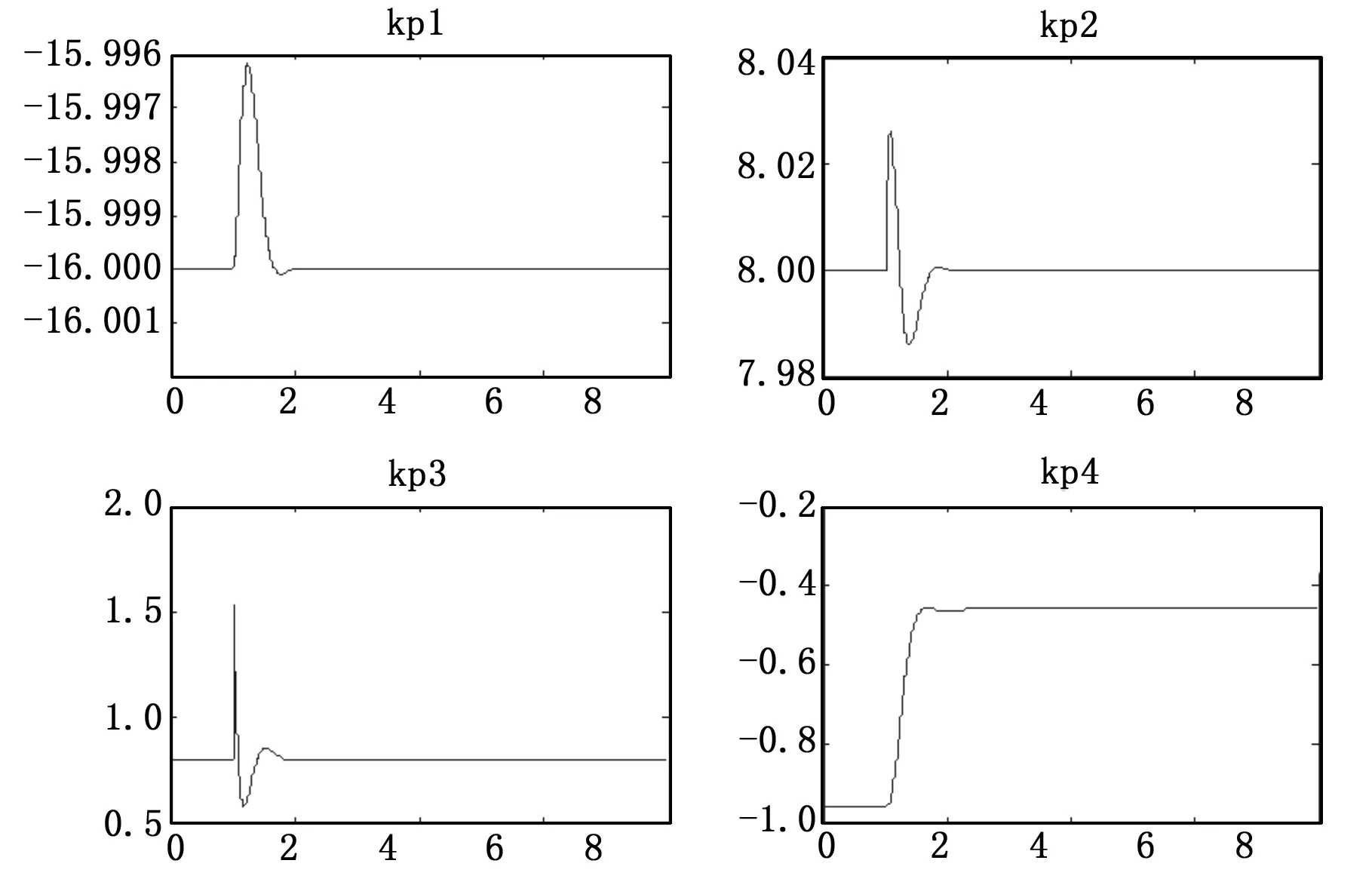
图6 Kp参数变化曲线图

图7 Kd参数变化曲线

图8 滚转角系统控制效果图

图9 实际模型的状态与参考模型的状态对比
对姿态角之一的滚转角Roll进行线性建模,结合模型参考自适应算法与PID控制算法,对滚转角设计了基于参考模型的PID自适应控制器。通过仿真结果,表明所设计的控制器具有良好的性能,能快速稳定的跟踪输入信号。
[1]NonamiK,KendoulF,SuzukiS,etal.Autonomousflyingrobots:unmannedaerialvehiclesandmicroaerialvehicles[M].NewYork:Springer,2010:77-93.
[2]CetinsoyE,DikyarSC.Hancer,etal.Designandconstructionofanovelquadtilt-wingUAV[J].Mechatronics,2012.
[3] 胡 镇. 倾转定翼四旋翼无人机垂直起降控制系统设计[D].南京:南京信息工程大学,2014.
[4] 王 岩. 倾转四旋翼无人机垂直起降阶段控制系统研究[D].哈尔滨:哈尔滨工业大学,2013.
[5] 邓习树,易小刚,吴运新. 主动隔振系统中的PID模型参考自适应控制技术[J]. 中国工程机械学报,2008(4):384-387,393.
[6] 梁春燕,钟庆昌,谢剑英. 基于模型参考的自适应PID控制器[J].上海:上海交通大学学报,2000(5):711-714.
[7]AndrievskyB,FradkovA.ImplicitmodelreferenceadaptivecontrollerbasedonfeedbackKalman-Yakubovichlemma[A].TheProceedingsoftheIEEEConferenceonControlApplications[C].ScotlandUK,1994:1171-1174.
[8]AlessandrodiGaeta,UmbertoMontanaro.ApplicationofarobustmodelRreferenceadaptivecontrolalgorithmtoanonlinearautomotiveactuator[J].InternationalJournalofAutomation&Computing,2014(4):377-391.
[9] 王 伟,胡 镇,马 浩, 等. 多旋翼倾转定翼无人机的姿态控制[J]. 计算机仿真,2014(1):31-35.
[10] 宋自立.四旋翼飞行机器人增稳控制方法研究[D].华北电力大学,2014.
Attitude Control System Design for Tilting Fixed-wing Unmanned Aerial Vehicle
Wang Tingting1,Qian Chengshan2,Zhang Yonghong1,Mao Haiqiang1,Zhu Linglong1
(1.School of Information and Control, Nanjing University of Information Science & Technology, Nanjing 210044,China;2.School of Computer and Software, Nanjing University of Information Science & Technology, Nanjing 210044,China)
This paper mainly research the tilt fixed wing-unmanned aerial vehicle with four rotors,namely quad tilt wing-unmanned aerial vehicle(QTW-UAV). Firstly we analysis the dynamics of QTW-UAV in helicopter mode and establish the dynamic model in rolling motion. Then design a PID adaptive controller based on reference model.Based on the traditional PID control method and combined with the adaptive control algorithm,we get the PID parameter self-tuning rate and achieve the attitude adaptive adjustment. Finally, the simulation results prove that the design of the controller have a good steady performance.
tilt fixed wing; UAV; PID parameter tuning; model reference adaptive control
2016-03-03;
2016-09-21。
国家自然科学基金(51575283)。
王廷廷(1990-),女,安徽淮北人,硕士研究生,主要从事飞行器控制方向的研究。
钱承山(1971-),男,山东泰安人,教授,硕士研究生导师,主要从事飞行器控制、非线性控制方向的研究。
1671-4598(2017)02-0064-03
10.16526/j.cnki.11-4762/tp.2017.02.017
N945.12
A
张永宏(1974-),男,山东临沂人,教授,博士研究生导师,主要从事飞行器控制、智能控制方向的研究。
