基于模糊辨识算法的蓄电池荷电状态测量方法与模块设计
2017-03-21唐骏宇冯长江
唐骏宇,冯长江
(军械工程学院 车辆与电气工程系,石家庄 050003)
基于模糊辨识算法的蓄电池荷电状态测量方法与模块设计
唐骏宇,冯长江
(军械工程学院 车辆与电气工程系,石家庄 050003)
针对蓄电池荷电状态在线监测中对准确度和测量速度的要求,提出采用模糊辨识算法对蓄电池进行系统辨识;并通过对蓄电池的荷电状态与内阻、端电压数据的分析,建立了蓄电池荷电状态的模糊规则模型,并以此进行蓄电池荷电状态的测量,得到均方误差为0.005 2;测量结果表明基于模糊辨识算法的蓄电池荷电状态测量能够满足蓄电池在线监测的要求,且易于硬件实现;文章还使用DSP Builder设计了蓄电池荷电状态测量模块,其中内阻测量采用了特征分解谱估计的信号提取方法,荷电状态测量则实现了模糊辨识算法所得出的模糊规则模型的运用。
系统辨识模糊辨识算法荷电状态
0 引言
蓄电池作为电源系统的备用电源,已广泛应用于工业生产、交通、通信等行业。如果电池失效或容量不足,就有可能造成重大事故,所以,对蓄电池的运行参数进行全面地在线监测,对提高直流系统的安全运行、提高供电系统的可靠性和自动化程度都有着十分重要的意义。对蓄电池状态的监测,主要包括对蓄电池的工作状态(如端电压、电流、荷电状态)的监测,以及对其性能状态(如容量、健康状况、寿命)的监测。其中蓄电池的荷电状态(state of charge,SOC)是蓄电池工作状态监测的核心,对荷电状态的准确测量是评估蓄电池剩余工作时间,制定蓄电池充放电控制策略,维持蓄电池正确使用模式的关键。
蓄电池的荷电状态(state of charge,SOC)定义为电池的剩余容量与额定容量的比[1],即:
SOC=C剩/C额
当电池完全满电时其SOC=1,而完全放电后其SOC=0。其中额定容量是指在标准测量环境下(25℃,1个标准大气压)通过10小时率恒流放电测试得到的蓄电池容量[1-2]。研究表明[3-4],VRLA蓄电池的SOC与其开路电压存在明显的相关性,利用此相关性可通过测量电池的开路电压来确定其SOC。但采用开路电压法需要测量蓄电池开路电压,而且由于蓄电池内部的张弛过程的存在,负载的变化将使蓄电池的端电压连续变化,至少在两个小时后才能达到稳定值,导致并不能通过短时间内的电路开闭来确定蓄电池的开路电压,并不适合在线的SOC测量;VRLA蓄电池的内阻已被证明与其SOC有密切的联系,其相关系数可达0.8~0.98[3],因此通过测量内阻数据可以得到蓄电池的SOC。然而蓄电池内阻不仅与其SOC相关,还与蓄电池本身的结构、健康状况、蓄电池工作的环境温度、内阻测量方法相关。因此,传统基于内阻的SOC测量方法需要对所测量的每个蓄电池进行建模,得出相应的SOC-内阻模型,才能实现SOC的测量。
蓄电池作为一个复杂的化学系统,很难用一个简洁的、易于硬件实现的数学模型对其进行准确描述。所以对于这样的复杂系统,可以采用系统辨识的方法对其进行建模。所谓系统辨识是在输入输出数据的基础之上,从一类系统中确定一个与所测系统等价的系统,而模糊辨识算法是模糊推理系统在系统辨识中的应用,即通过对模糊推理系统进行参数辨识,来逼近所测的系统,从而建立与所测系统等价的模型。
1 模糊辨识算法
美国学者L.A.Zadeh于1965年提出模糊集合理论,为大量的研究复杂的、不确定性问题的理论和技术提供了数学依据。基于模糊集理论的研究包括模糊推理系统、模糊控制理论等,它们被广泛运用于诸如模式识别、故障诊断、医疗诊疗、人工智能等需要处理实际模糊性信息的场合,也同样用于复杂系统的建模当中。其中运用于模糊辨识算法的模糊推理系统根据其结论命题的形式分为语言模糊模型、模糊关系模型、T-S模糊规则模型。T-S模糊规则模型由Takagi和Sugeno于1985年提出,两人还证明了T-S模糊规则模型能够高度逼近任意非线性系统。与其他模糊推理系统相比,T-S模糊规则模型所使用的模糊规则较少,而且被应用在模型中的规则相对简单,因此在模糊辨识算法中通常采用T-S模糊规则模型作为待辨识的模糊推理系统[5]。
T-S模糊规则模型的模糊规则可以描述如下:
Ri: Ifx1isAi1andx2isAi2and…
andxpisAip
thenyi=fi(x);
i=1,2,…,K;x=(x1,x2,…,xp)T
其中:x∈Rp为输入变量;yi∈R是输出变量;Ri表示第i条规则;K为规则数;Ai为第i条规则的前提模糊集合,它通过隶属函数来定义:
(1)
上述规则描述表示出了系统的输入空间模糊划分:假设第i个输入变量xi的间隔区间被均分为Ni个模糊集合Ai1,Ai2,...,AiNi,i=1,2,···,p。这样输入空间被分成N1,N2,···,Np个模糊子空间(A1j1,A2j2,···,Apjp),其中:
j1=1,2,···,N1,
j2=1,2,···,N2,
⋮
jp=1,2,···,Np
对于每一个空间划分,需将隶属函数应用于前提模糊集合当中。在模糊辨识算法中,模糊推理系统隶属函数的选择会影响模糊辨识算法的性能。一般根据具体问题要求来确定隶属度函数。常见的隶属函数包括三角形、梯形、钟形等。其中三角形隶属函数形式简单,易于实现,并且计算耗费时间少,实时性好,因此在对蓄电池在线监测系统中运用的模糊辨识算法里采用三角形隶属函数,其表达形式如式(2)所示:
(2)

在模糊辨识算法中一般用参数化的形式来表示结论函数,在所有规则当中结论函数的结构保持一致,只有参数是变化的,模糊辨识算法的核心即是对这些参数进行辨识。通常情况下fi(x)以线性化表示,即:
(3)
在T-S模型中,其推理可以简化成代数的形式(类似于模糊—平均去模糊形式):
(4)
其中对于每一条规则Ri,有:
(5)

(6)
其中:
p= (b10,b11,b12,…,b1p,b20,b2 1,b22,…,b2p,…,bKp)T
将N组输入输出代入上式可得到矩阵等式:
Z=Xp
(7)
对模糊参数向量p的辨识采用递推最小二乘算法,令X的第i个行向量为xi,Z的第i个分量为zi,则递推算法为:
(8)
(9)

其初始条件为:p0的分量为0或尽量小的随机数,S0=αI,α一般取大于10 000的实数[5],I是6×6维单位矩阵。
模糊辨识算法可表述为如下步骤:
1)确定输入变量,并对每一个输入空间进行划分(确定规则数);
2)选择隶属度函数,计算前提参数;
3)代入输入输出数据,形成矩阵等式;
4)对参数向量p进行辨识;
5)以均方误差作为性能指标:
(10)
如果J小于事先设定的阈值或者相邻两次不变,则转到6),否则转到4)。
6)如果J满足辨识精度,则辨识算法结束,否则增加规则数,转到2)。
2 蓄电池模糊规则模型的参数辨识
由于蓄电池的端电压和内阻是与荷电状态密切相关的两个变量,而它们任何一个都无法单独用于在线测量荷电状态。所以考虑同时采用两者作为运用模糊辨识算法测量荷电状态时的输入变量。为使输入变量不受电池具体型号规格的影响,对电池的内阻及端电压进行归一化处理:
(11)
通过对由风帆公司生产的型号为6-QW-120b的蓄电池组进行放电实验得到模糊辨识算法所需的输入输出数据。实验采用ITECH公司生产的IT-B1004电池充放电测试系统同时采用日本HIOKI公司生产的BT3563蓄电池测试仪对充放电过程中电池的端电压及内阻进行测量。实验室环境温度为20℃,实验前电池预先充满电后静置1 h。放电时采用3 h率放电(电流I=0.25Cs=30 A),前30 min内每隔2 min测量并记录电池的端电压和内阻,而后每隔5 min记录一次,当电压下降至1.9 V/单体时每隔2 min记录一次,至电压下降至1.8 V/单体时放电完成。实验得到输入输出数据共38组。选择前25组数据作为参数辨识数据,后14组数据作为算法检验数据,对第1节所述模糊规则模型进行参数辨识以逼近蓄电池SOC。此时的模糊规则模型为双输入单输出的T-S模糊规则模型。通过辨识最终得到的参数向量:
p=(-1007.9677, 148.4810,987.2122,
38.7863,-268.3349, 259.0657)
模型训练及测试结果如图1所示。
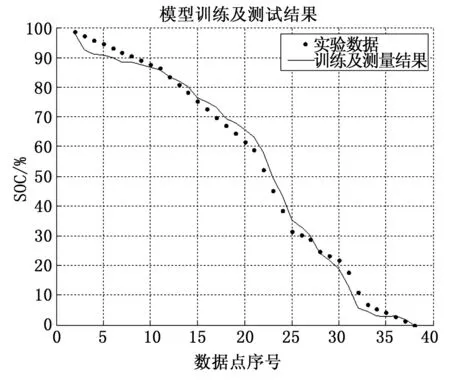
图1 模型训练及测试结果
计算得到性能指标J=0.052 2,此时模糊规则可以表述为:
R1: Ifx1isA11andx2isA12
theny1= -1 007.967 7+148.481 0x1+987.212 2x2;
R2: Ifx1isA21andx2isA22
theny2= 38.786 3-268.334 9x1+ 259.065 7x2。
3 蓄电池SOC测量模块的设计
蓄电池测量模块总体设计如图2所示。
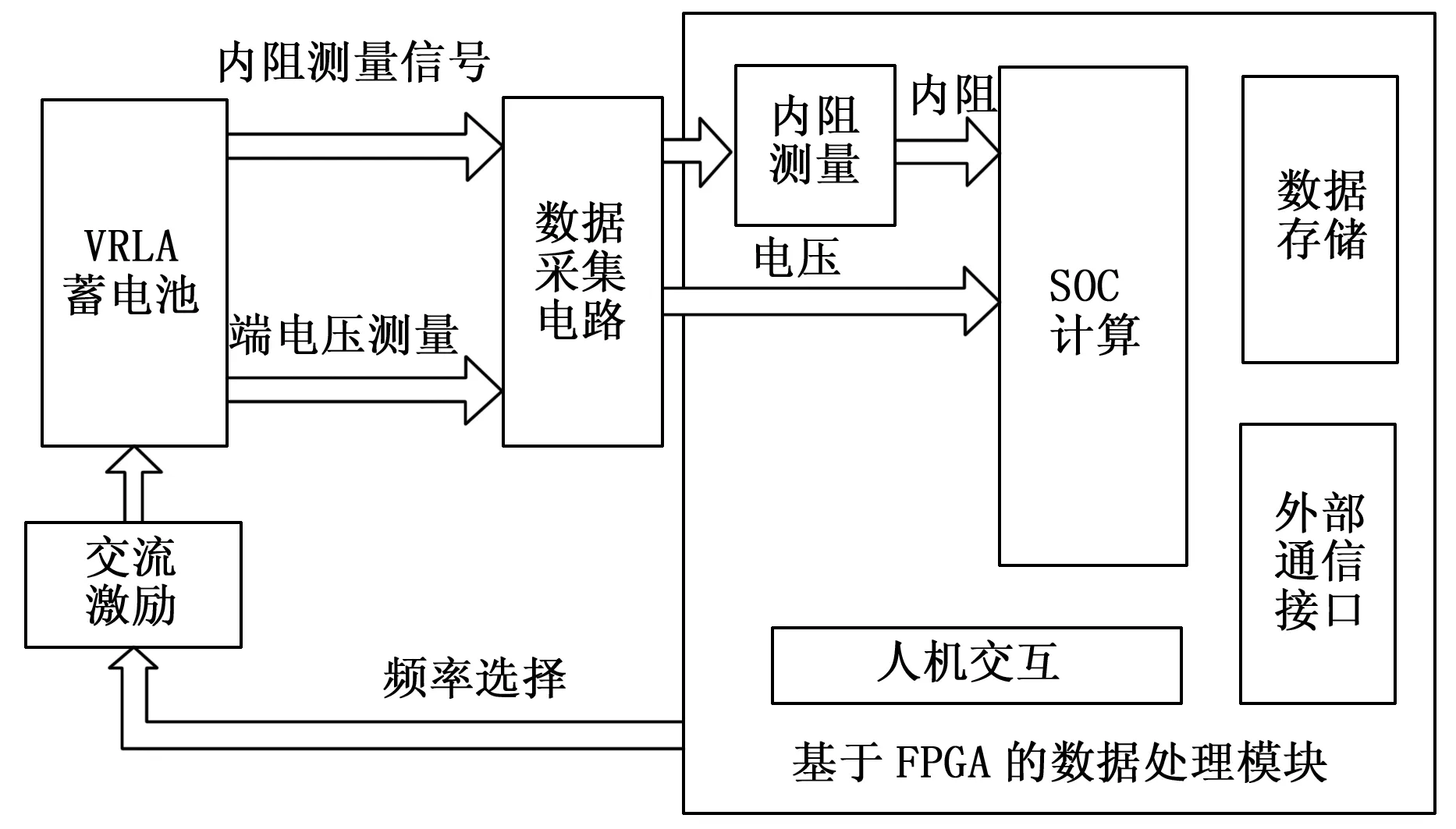
图2 蓄电池测量模块总体设计
其中:FPGA内的测量模块通过采用DSP Builder来实现。DSP Builder是Altra公司开发的用于利用FPGA实现DSP功能的系统级软件。它提供了一个从MATLAB/Simulink直接到FPGA硬件实现的设计接口。DSP Builder极大地简化了DSP功能的硬件实现流程,并提供了系统级仿真测试功能,设计者可以不了解硬件描述语言HDL的设计流程,不必懂硬件描述语言本身,也能进行DSP应用系统的FPGA开发[6]。在运用DSP Builder进行DSP应用系统的FPGA开发时,必须使用DSP Builder所提供的模块来搭建系统,从而保证系统的可综合性。
3.1 内阻测量
内阻采用基于特征分解谱估计的蓄电池内阻测量方法[7],而对于蓄电池内阻检测中的信号提取,其响应信号为频率已知的正弦信号,所以特征分解谱估计得出的频率分量是指复频率分量,因而一个实际的正弦信号分量对应的是正负两个幅值为A/2的复频率分量,即:
(12)
而事实上在蓄电池内阻测量过程中,我们所关心的只是信号的幅值。对于单一的正弦信号,其两个复频率分量功率是相等的,所以只需求得最大特征值所对应复频率分量的功率。于是所取的信号自相关矩阵简化为如式(13)所示只包含一个频率分量的形式。此时特征值:
(13)
因此得到幅值:
(14)
特征分解谱估计方法中自相关函数估计通过采用delay模块实现对待测随机序列的移位,并通过延时累加的方式完成,如图3所示。增益模块Gain采用二进制移位运算的方式实现,If Statement模块使N=1 024时输出自相关函数的估计值。
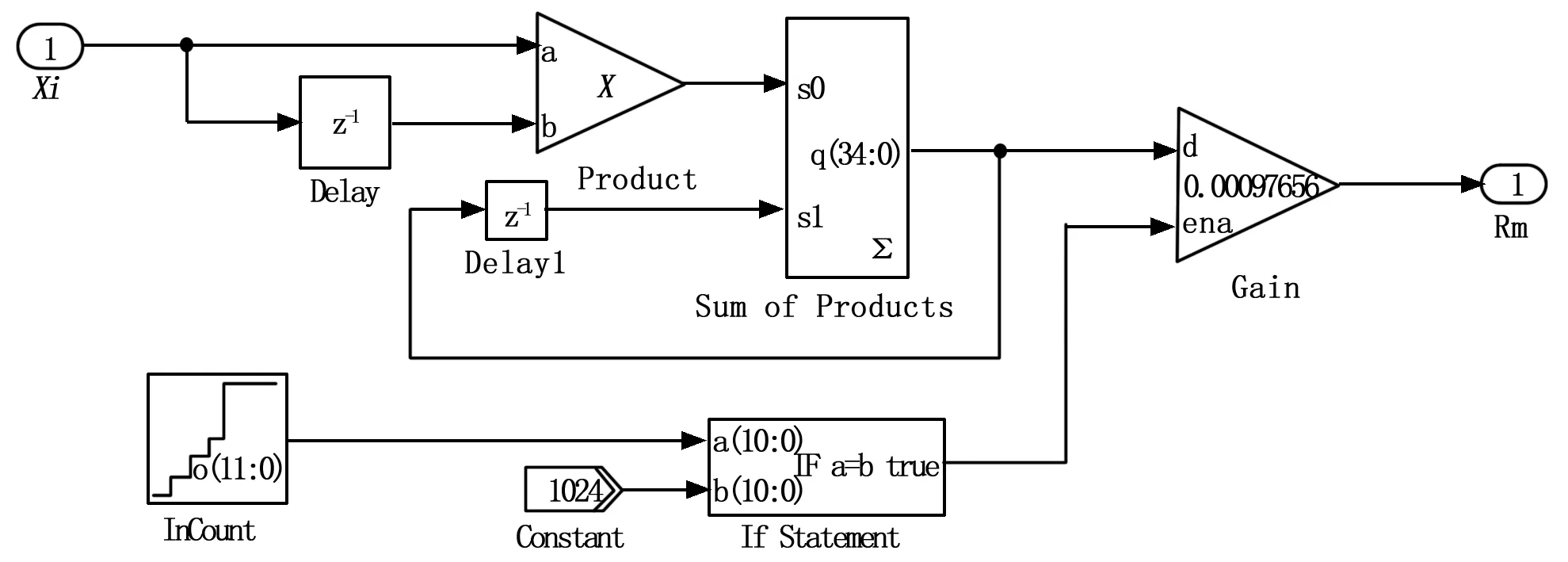
图3 自相关函数估计子模块
通过改变图中Delay1的延迟可以计算式2-19中m为不同值时的自相关函数值。这里取m=1~8,用8个自相关函数估计模块同时计算得出。得到的自相关矩阵输入至RAM中储存,如图4所示,Rm由8个自相关函数估计子模块组成,通过多路选择器依次输出所得结果,最后得到M=8阶自相关函数矩阵R。
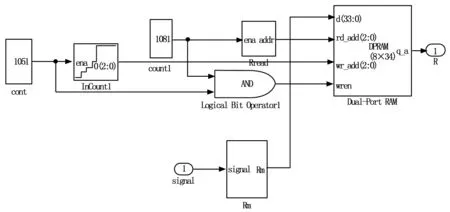
图4 自相关函数矩阵的建立
自相关矩阵的最大特征值和所对应特征向量通过幂法迭代求得,其算法步骤如下:
1)输入矩阵A,初始特征向量x0,初始特征值λ=0,迭代次数N;

3)xk + 1= Ayk,λ=max(|xk+1|);
4)k=N-1时输出xk+1,λ。
第(3)步中矩阵的乘法通过移位运算模块实现,如图5所示,其中R是自相关矩阵输入,x0=(1,1,1,1,1,1,1,1)为初始特征向量。
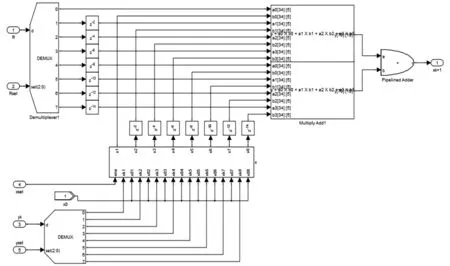
图5 矩阵相乘子模块
完整的幂法求矩阵最大特征值和对应特征向量的模块如图6所示,图中P为输出最大特征值,P1~P8为特征向量的8个元素,经过1 376个时间单位后输出结果。
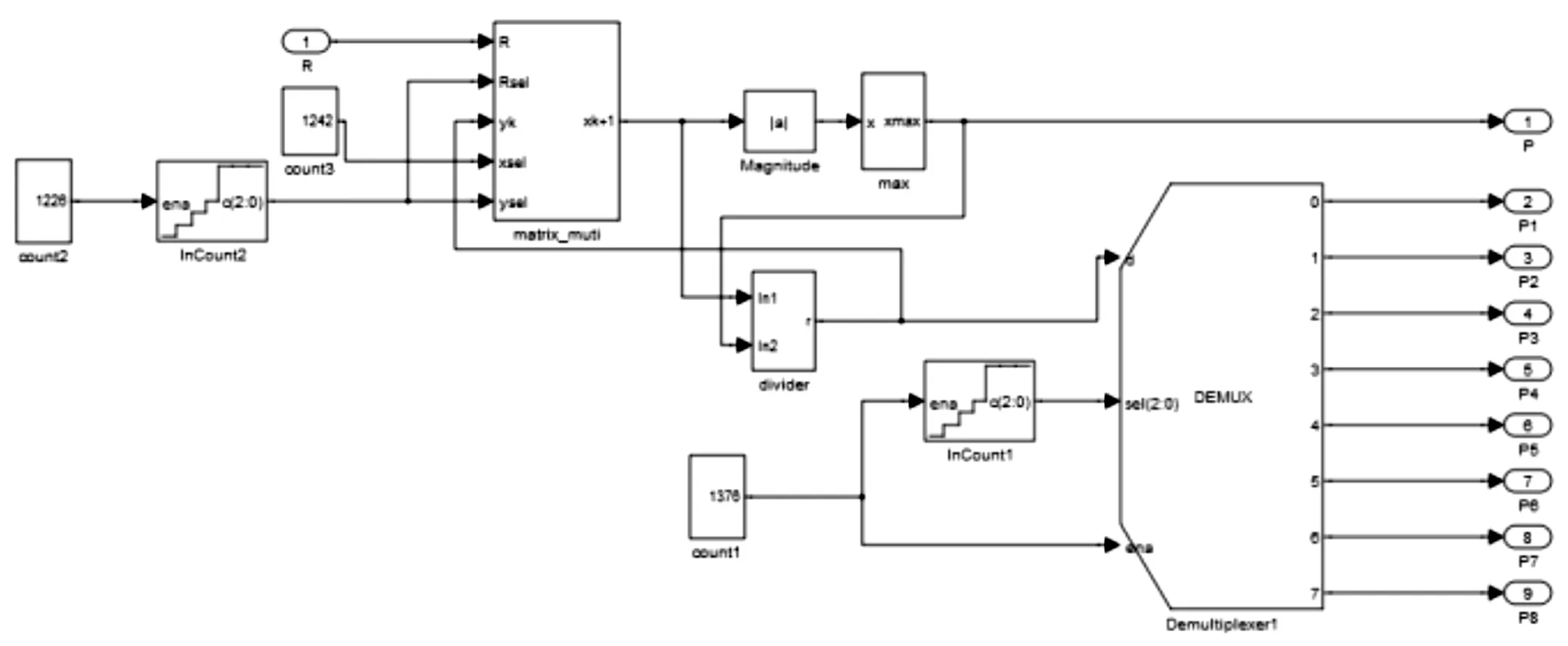
图6 幂法求矩阵最大特征值和对应特征向量

图7 幅值检测子模块
最终的内阻检测是蓄电池交流响应幅值与精密电阻交流相应幅值的比值再乘上精密电阻阻值的结果,如图8所示,精密电阻阻值通过Gain模块引入:
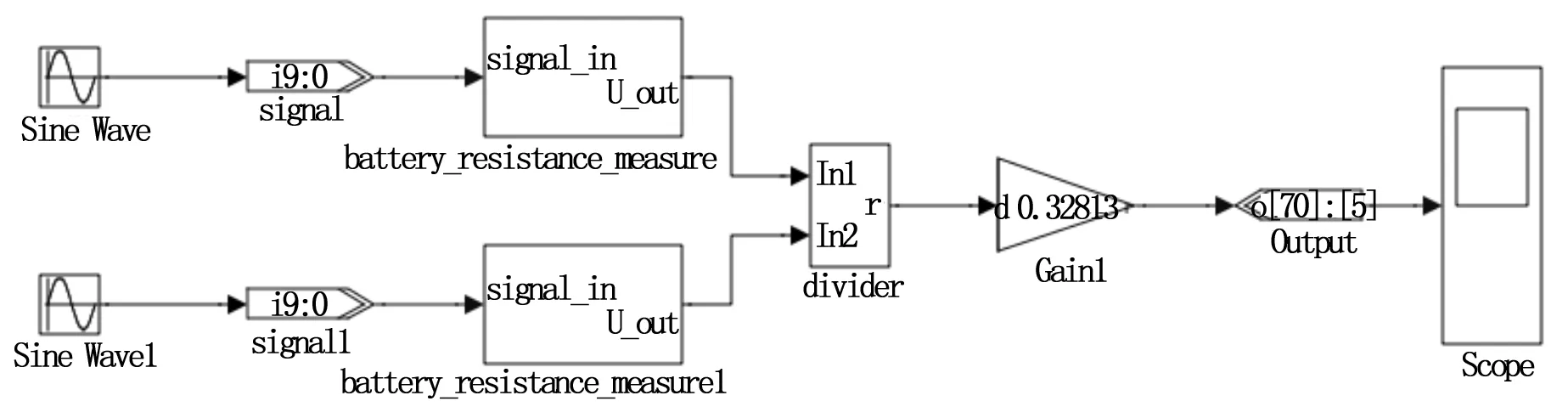
图8 内阻测量模块
3.2 SOC测量
则有:
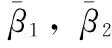
图计算子模块
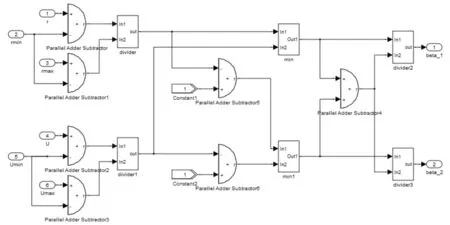
最后根据式(7)计算SOC值,SOC计算模块如图10所示。
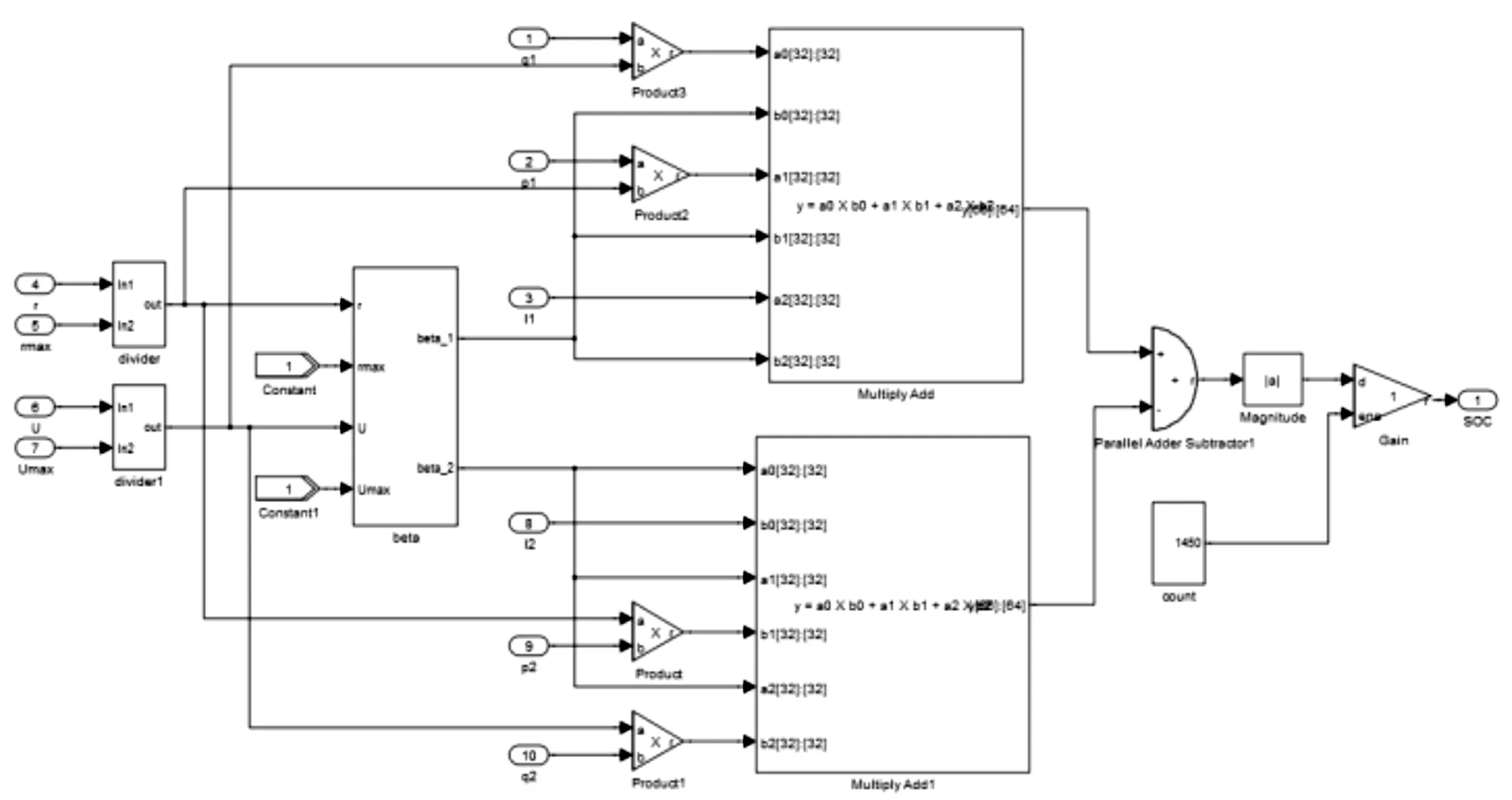
图10 SOC计算模块
4 结束语
本文采用模糊辨识算法,通过对蓄电池的荷电状态与内阻、端电压数据的分析,建立了蓄电池荷电状态的模糊规则模型,测量均方误差为0.005 2。然后使用DSPBuilder设计了蓄电池荷电状态测量模块。模块可下载至FPGA建立硬件系统,并进行进一步分析。
[1]邹幽兰.基于退役锂动力电池容量、内阻和荷电状态的建模与参数估计[D].长沙: 中南大学, 2014.
[2] 王斯成,陈子平,杨 军,等.蓄电池剩余容量(SOC)数学模型探讨和在线测试仪的开发[J].太阳能学报,2005, 26(1): 6-13.
[3] 王吉校,钱希森.阀控铅酸蓄电池容量测试技术研究[J].蓄电池,2007,2: 57-63.
[4]GB/T19638.2.-2005.固定型阀控密封式铅酸蓄电池标准的研究与制定[S] .
[5] 刘福才. 非线性系统的模糊模型辨识及其应用[M].北京:国防工业出版社,2006.
[6] 宋烈武.EDA技术与实践教程[M]. 北京:电子工业出版社,2009.
[7] 唐骏宇, 冯长江. 基于特征分解谱估计的蓄电池内阻检测方法[J]. 计算机测量与控制,2016,24(6):37-40.
Battery State of Charge Measurement Methods and Modular Design Based on Fuzzy Identification Algorithm
Tang Junyu, Feng Changjiang
(Department of Vehicle and Electrical Engineering, Ordnance Engineering College, Shijiazhuang 050003 China)
According to the accuracy and speed requirements of battery State of Charge measurement for online monitoring, this paper presents a battery system identification based on Fuzzy Identification Algorithm. And through the analysis of battery State of Charge and internal resistance, voltage-side data, the fuzzy rule model of battery State of Charge is built. The measuring mean square error of the model is 0.005 2. Measurement results show that method for the State of Charge of the battery measuring based on Fuzzy Identification Algorithmcan battery-line monitoring to meet the requirements, and easily implemented in hardware. The article also use the DSP Builder to design the battery State of Charge measurement module, where the resistance was measured using the signal feature extraction method based on Eigendecomposition Spectrum Estimation,and State of Charge measurement is to achieve the uses of the fuzzy rule model derived from Fuzzy Identification Algorithm.
system identification; fuzzy identification algorithm; state of charge
2016-04-07;
2016-06-21。
唐骏宇(1992-),男,湖南益阳人,在读硕士研究生,主要从事蓄电池状态监测技术方向的研究。
冯长江(1963-),男,河北石家庄人,教授,硕士生导师,主要从事装备电气性能检测与智能系统方向的研究。
1671-4598(2017)02-0039-04
10.16526/j.cnki.11-4762/tp.2017.02.010
TP311
A
