乌江渡水电站激光准直变形监测资料分析
2017-03-20文富勇刘剑鸣
文富勇,刘剑鸣,杨 弘
(1.水能资源利用关键技术湖南省重点实验室,湖南长沙410014;2.中国电建集团中南勘测设计研究院有限公司,湖南长沙410014)
1 工程概况
乌江渡水电站大坝为混凝土拱形重力坝,坝顶高程765.00 m,最大坝高165.00 m,坝顶弧长394.6 m,设计正常蓄水位760.00 m,死水位720.00 m。大坝最大底宽119.50 m, 708.00 m高程以下的坝体横缝通过接缝灌浆形成拱形整体,上部高57 m的坝体为单块稳定的重力坝,自右向左共分为17个坝块,最大坝块宽23 m。河中④~坝段坝轴线半径为500 m,中心角26°36′的圆弧;右岸①~③坝段圆弧半径为80 m,左岸~坝段为直线等宽坝段。
拱坝水平位移监测通常采用“垂线法+导线法”和“垂线法+视准线法”,然而这种观测方法不仅观测精度低,适应性差,无法实现全自动化观测。乌江渡水电站为混凝土拱形重力坝,采用“垂线法+视准线法”进行水平位移监测,视准线从④~坝段每个坝段设1个测点,在④、⑧和坝段各布置一组正、倒垂线。由于视准线工作基点布置在两岸坝肩靠上游侧,稳定性相对较差,且视准线长度超过了规范要求的300 m,测点除拱冠梁处外,其余测点均不能监测径向变形,综上考虑到视准线的缺陷以及人工观测的不便,取消坝顶视准线,改为在靠近坝顶的廊道内安装一套激光准直拱坝变形监测系统,其水平位移工作基点设在左、右岸灌浆廊道内,并利用④、⑧和坝段的垂线组进行校验,构成串联式“激光准直+垂线”的拱坝变形监测系统,实现拱坝坝体变形的全自动化观测。

图1 激光准直变形监测布置平面

图2 激光准直高差衔接布置剖面(单位:尺寸mm;高程m)

图3 激光准直竖折连续传递布置剖面(单位:尺寸mm;高程m)
2 激光准直系统布置
激光准直拱坝变形监测系统布置从右岸737.50 m高程的灌浆隧洞至左岸713.00 m高程的灌浆隧洞,共布置了17个单元的激光准直装置,如图1所示。采用首尾相接、高差过渡衔接、竖折连续传递的形式,全长约361 m,其中在④坝段通过设置高层传递仪和新增垂线点将738 m高程廊道和713 m高程廊道内的激光准直线路衔接,形成垂直位移和水平位移的高差衔接传递,见图2;在坝段和坝段间采用竖向折线传递形式完成两个楼梯坝段激光准直线路衔接,见图3。
激光准直变形监测系统仅能进行径向水平位移和垂直位移监测,无法实现切向水平位移监测,为了实现切向水平位移监测,在每一单元的激光准直段各增设一套专门用于监测切向水平位移的铟钢杆式位移计。水平位移以布置在左、右岸灌浆隧洞内的激光准直单元的左、右端点为工作基准点,实现双基准闭合监测和误差修正,同时与④、⑧、坝段的垂线系统监测值进行对比验证,提高系统的可靠性和观测精度。垂直位移以左、右岸灌浆隧洞内增设的双金属标的方法建立双水准工作基点,形成双基准附合水准测量,以提高测量精度或进行误差修正[5]。
乌江渡水电站激光准直系统通过“分段接力”方式实现拱坝全坝段变形监测[2],尽管从理论上推算“分段接力”的方式是可行,但能不能反映大坝的实际变形情况还需通过监测数据进行具体分析[3]。本文通过对激光准直系统在真空条件下和微压差条件下的监测数据进行深入分析,同时与现有正倒垂线监测数据进行对比分析,验证乌江渡水电站激光准直系统的可行性。
3 激光准直系统监测资料分析
乌江渡水电站激光准直监测系统分别在真空条件和微压差条件下进行观测,其中真空条件下观测时间序列为2011年12月1日至2012年12月6日,微压差条件下观测时间序列为2012年12月8日至2013年5月13日。
各测点位移:上、下游方向(径向)以X表示,向下游为正,向上游为负;左、右两岸方向(切向)以Y表示,向左岸为正,向右岸为负;垂直位移以Z表示,上抬为正,下沉为负。
3.1 真空条件下
各测点位移测值变化过程线见图4,2012年5月12日至2012年7月31日期间激光准直系统发生故障,无监测数据,其余时段由于测值序列较短,各坝段测点无明显的周期性变化,无异常变化。靠近两岸处测点沿上下游方向水平位移和垂直位移均比同期其余测点变化小;左右岸方向水平位移的变幅相对上下游方向位移变幅明显为小,右岸R5~R9测点过程线变化规律基本一致,左岸R10~R16测点过程线变化规律也基本一致,即过程线中峰谷值出现的时间基本一致;布置在坝段楼梯坝段的上测点R12(726)和下测点R12(713)过程线变化规律基本一致,即过程线中峰谷出现的时间基本相同,符合同坝段测点相对变形趋于一致的基本规律。

图4 激光准直变形监测系统各测点位移测值过程线
选择激光准直系统在2012年不同季节(2月、8月)的监测资料绘制位移变化曲线(见图5)并进行分析。可知,大部分坝段测点沿上下游方向位移变化曲线低温季节在上,高温季节在下,表明低温季节向下游变形,高温季节向上游变形,这符合混凝土坝温度对坝体水平位移影响的变化规律;向下游最大位移发生在拱冠处测点,向上游最大位移发生在左岸~坝段。①~坝段各测点无论高温季节还是低温季节向左右岸方向位移均不大,说明其受温度影响不大;~坝段分布曲线高温季节在上,低温季节在下,说明高温季节向左岸变形,低温季节向右岸变形,也符合温度对坝体位移影响的变化规律。无论高温季节还是低温季节各坝段测点垂直位移测值非常接近,说明温度对垂直位移影响不大[1]。
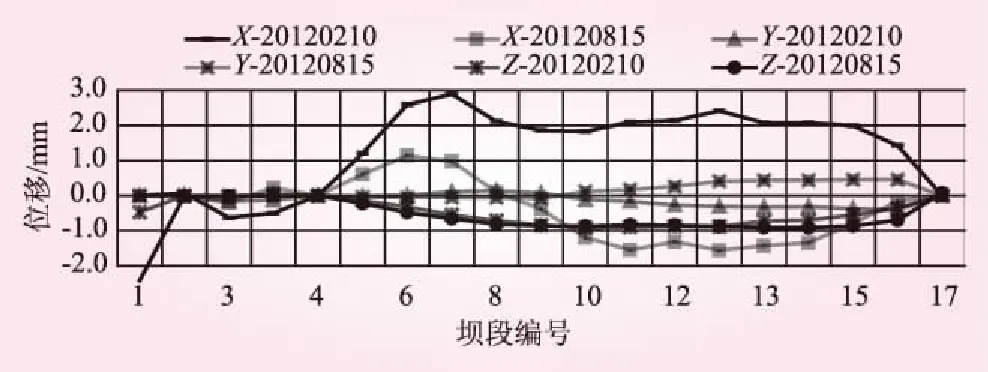
图5 位移变化曲线示意
总体来说,真空条件下各测点变形基本符合坝体变形变化一般规律,但变化量相对较小,系统敏感性较低。
3.2 微压差条件下
2012年12月6日至2013年5月13日,对激光准直系统充装惰性气体进行了微压差试验,各测点变化过程线见图6。

图6 激光准直变形监测系统各测点测值过程线
由于测值序列较短,各坝段测点监测数据无明显周期性变化。大部分测点左右岸方向和垂直方向的位移测值较小,其变化幅度也相对较小,相对于沿X向位移变幅也较小;对比不同年份相同时段上下游方向的水平位移测值,微压差条件下比真空条件下的测值要大,测值过程线的变化规律也较为明显。各坝段沿左右岸方向和沿垂直方向位移测值均不大,远小于X向的测值,符合一般规律。
将2012年12月至2013年5月微压差条件下激光准直变形监测数据与2011年12月至2012年5月真空条件下的监测数据进行对比分析,微压差条件下各测点的激光准直径向水平位移测值比真空条件下的测值大,说明激光准直变形监测系统在微压差条件的性能比真空条件下的工作性能要好,灵敏高,其过程线所反映的变化规律更为明显。
激光准直变形监测系统采用了真空激光准直与微压差激光准直两种工作模式[4],受现场环境条件、系统管道的密封条件等因素影响,系统运行的可靠性是不相同的。对比分析初步表明,真空条件下对系统管道密封要求较高,维持其真空状态所花费的代价较大,而微压差条件下观测成果相对较好,对系统管道的密封要求不高,运行稳定可靠。
4 监测数据对比分析
激光准直系统与坝体正、倒垂线变形监测系统在布置上有3处交集点,具体位置及各测点编号见表1。

表1 交集点位及测点编号汇总
2011年12月1日至2012年12月6日采用真空方式进行监测,2012年12月8日至2013年5月13日采用微压差方式进行监测,分别将正、倒垂线监测数据与真空条件下和微压差条件下激光准直变形监测系统的数据进行对比分析。
4.1 真空条件下对比分析
垂线与真空激光准直变形监测系统对应交集点如图7所示。由图7可知,④坝段X方向激光准直变形监测系统的测值相对偏小,其相关性不明显;Y方向正常情况下测值均不大,其变化规律基本相似。⑧坝段X方向具有可比性的时段很少,在9月前后的过程线总体变化规律有一定的相似性;Y方向全时段测值变幅均很小,符合一般性规律。坝段X方向9月前后的过程线不太平滑,但总体变化规律有一定的相似性;Y方向8月中旬垂线系统发生了约2 mm阶跃式跳变,排除其影响后测值均不大,其变化规律总体上基本相似。总之,在真空条件下,激光准直变形监测系统与正、倒垂线交集点变化规律的一致性存在部分差异。

图7 交集点左右岸方向水平位移测值过程线
4.2 微压差条件下对比分析
微压差激光准直变形监测时段从2012年12月8日至2013年5月13日止,共有约5个月的监测资料,由于④坝段和⑧坝段正、倒垂线采集模块出现故障无法通讯导致该时段R4-1和R8-1无监测数据,因此,仅将坝段垂线测点(R13-1)与激光准直变形监测系统测点(R13)相关交集点的监测数据进行对比分析,过程线如图8所示。
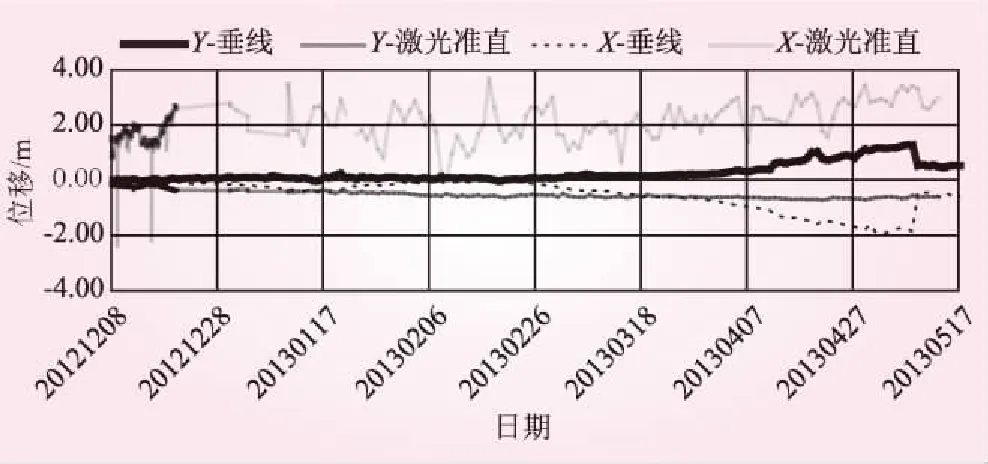
图8 水平位移测值过程线
表2 坝段激光准直与垂线测点对应测值
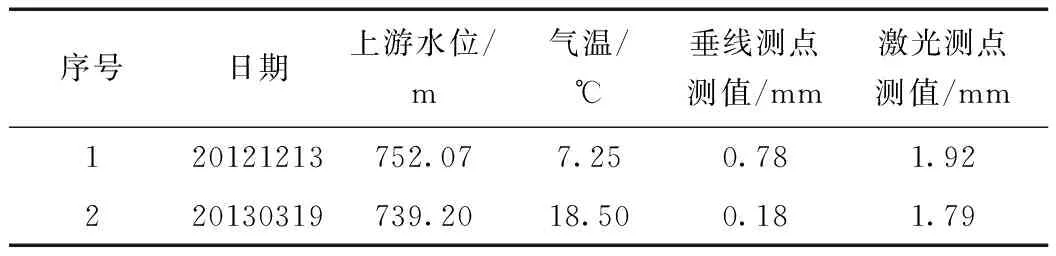
表2 坝段激光准直与垂线测点对应测值
序号日期上游水位/m气温/℃垂线测点测值/mm激光测点测值/mm120121213752.077.250.781.92220130319739.2018.500.181.79
5 结论与建议
激光准直变形监测系统能够反映大坝变形变化规律,可用于拱坝变形自动化监测。激光准直变形监测系统在微压差条件下的性能比真空条件下要好,灵敏度高,反映的变化规律更为明显。真空条件对系统管道密封要求较高,而微压差条件下系统管道密封要求不高,可靠性高。因此,建议乌江渡工程后期运行的位移变形监测采用微压差工作模式,并与垂线系统结合进行综合分析。
[1] 李珍照. 大坝安全监测[M]. 北京: 中国电力出版社, 1997.
[2] 彭欣欣, 郝灵, 张鹏, 等. 真空激光变形监测系统在小湾双曲拱坝中的应用[J]. 水力发电, 2015, 41(10): 72- 74.
[3] 杨仁, 潘正风. 激光导线系统测定拱坝位移[J]. 武汉测绘科技大学学报, 1988(3): 1- 3.
[4] 邓念武, 叶泽荣, 龚玉珍. 白山拱坝位移激光监测自动化系统研究[J]. 大地测量与地球动力学, 2002(2): 122- 123.
[5] 田国民, 尹望军. 乌江渡激光准直变形监测技术应用[J]. 商品与质量, 2015(50): 123- 124.
