机载红外行扫仪它机试飞技术
2017-03-18王睿魏挺邓佳欣
王睿++魏挺++邓佳欣
摘要:本文针对机载红外行扫仪的关键技术指标,对在它机平台上试飞的可行性进行了分析,给出了如何基于它机试飞平台的特点,对性能指标进行折算的分析,提出了机载红外行扫仪的它机试飞方法。试验证明,该方法切实可行。
Abstract: In view of the key technical indexes of airborne infrared scanning device, this paper analyzes the feasibility of flight test on other plane, and presents the method of performance index conversion based on the characteristics of the test platform. The airborne infrared scanning device flight test method on other plane is proposed. The experiment proves that the method is practicable.
关键词:机载红外行扫仪;速高比;收容宽度
Key words: airborne infrared scanning device;speed ratio;storage width
中图分类号:V241.02 文献标识码:A 文章编号:1006-4311(2017)05-0173-02
0 引言
机载红外行扫仪,是侦察设备系统的组成部分,是其核心功能部件,可用于昼夜间简单气象条件下临空垂直侦察。机载红外行扫仪一般由红外光学系统、红外探测器组件、信號处理系统、红外行扫仪主控制系统等组成。同时因为该设备是一种新型机载侦查装置,为了达到对其性能进行科学合理评估的效果,有必要对其试飞方法进行系统的研究。
1 试飞方法研究
机载红外行扫仪具备实时生成目标区图像信息的能力,而且具有根据载机实时姿态与速度,对成像系统进行自动姿态补偿、自动像移补偿功能。因此,根据以上功能特点,机载红外行扫仪主要考核性能集中在:速高比、瞬时视场、收容宽度、图像质量这四个方面。
由于机载行扫仪与载机其他系统的关联度相对较小,在搭载平台的选择上有较大的自由度,因而,除在本机上进行试飞评估的方式外,亦可选用其他飞机作为试验载机,模拟本机飞行状态,对其进行性能评估试飞。
2 试验载机状态分析
速高比是光学侦察任务设备能否正常成像的关键因素之一,该因素由试验载机飞行相对地面速度(单位:m/s)与飞行相对地面高度(单位:m)数值比值来决定。速高比主要影响红外行扫仪的工作频率。根据机载红外行扫仪成像机理,速高比越低越有利于成像。当在载机平台发生变化后,要求它机保持与本机平台相同的速高比范围,即能保证红外行扫仪的正常工作。
由于空中风速方向、大小不确定,根据已知的侦察设备正常工作速高比范围,通过计算,可得到在它机上进行试飞时,符合所选用机型飞行包线,同时又可满足机载行扫仪成像的飞行高度与飞行速度比范围。如在保证飞行安全的前提下,它机平台载机在可达到的最高飞行高度为H1,而在此高度下,载机可达到的最大飞行地速为V1;而它机平台可飞行的最低高度为H2,在该高度下的最小飞行地速为V2。那么,该它机平台可验证的速高比范围应为(V1/H1~V2/H2)。若该范围与机载红外行扫仪的速高比范围相似,或处于红外行扫仪速高比范围内的较高区域甚至有部分超出该区域,那么就可判定,该机型可用于进行红外行扫仪它机试飞试验。
3 它机试飞验证性能指标折算分析
机载红外行扫仪在试验载机与本机上工作环境最大的不同就是飞行高度和速度,需根据机载红外行扫仪在本机工作时的指标要求,通过高度比例换算到低高度上的指标值,从而再通过验证低高度的指标推算出其在机载的性能指标。根据机载红外行扫仪的主要性能,主要分为以下几个方面试飞:
①地面分辨率试飞:根据相应高度下的地面可分辨率的大小,设计特殊的靶标,且识别概率应满足要求。
②收容宽度试飞:在样本图像的横向有效边缘选择一明显的地标,测量其地面实际横向距离。
③速高比试飞:选择在不同的速高比情况下进行飞行,根据成像质量,验证其速高比范围是否满足要求。一般选择分别在中、低、高三个高度层下,用不同的低速飞行,以达到验证目的。其中应尽量安排包含有速高比范围较高端临界值的考核条件,进行飞行验证。
④图像质量试飞:选取多组样本,判断其图像质量是否符合使用需求。该项性能,仅与成像质量有关,在符合速高比范围的前提下,载机平台的更改对其并不会造成影响,故验证方法同本机试飞的考核方法,在此不再赘述。
3.1 地面分辨率指标折算
在相同的测试气象条件下围了适应它机试飞高度的变化,需对地面分辨率进行相应折算,公式如下:
■=■
R1:规定的地面分辨力;
H1:规定的测试飞行高度;
R2:需达到的地面分辨力;
H2:需达到的测试飞行高度。
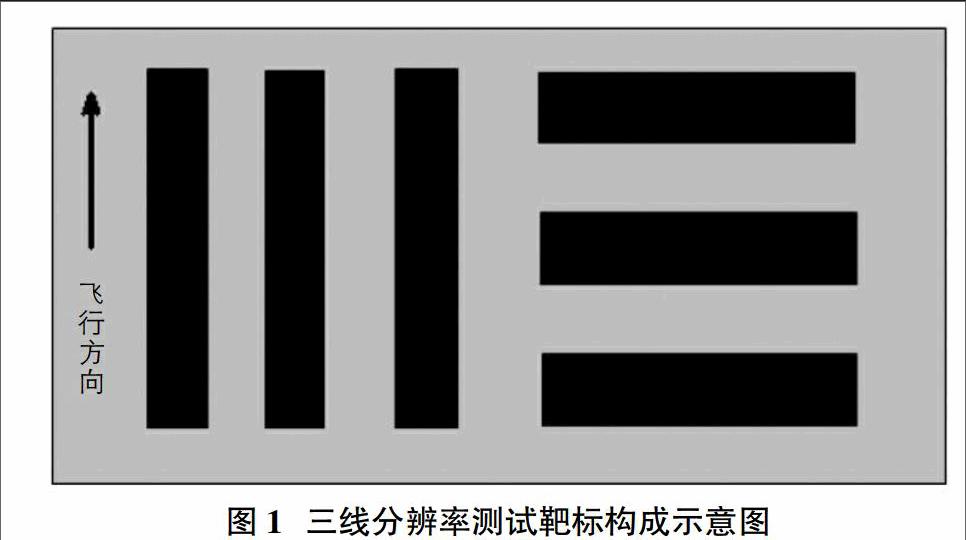
由约翰逊法则可知,1黑1白两条线构成够成一对线,一对黑白条纹宽度为则不应小于折算所得指标大小。由此,我们设计出一套如图1所示的由6个红外热辐射线条组成三横三竖的“单一”三线单元正像靶标。
由于设备为红外探测设备,因此地面分辨率的大小同时和线条与背景的温度反差有关。反差大,则成像设备的地面分辨率高;反差小,则成像设备的地面分辨率低。根据大气透过率计算及比例关系:
ΔT'=τ×ΔT
τ:大气透过率;
ΔT:规定温差。
从而可得到实际考核时,所需进行控制的温差大小。
最终,在载机飞行航线的正下方选择红外辐射强度相对均匀的背景区域作为红外靶标布设区域,如选择机场内水泥地面或草地。靶面与水平面保持平行,且靶面向上。靶标中的三线单元与飞行航线平行垂直布设。
在观察地面分辨率测试样本中的靶标图像。靶标图像中三线单元中白—白线具有分离趋势的的三线单元对应的分辨率即为被测设备的地面分辨率。也就是说,如果能区分出黑白线条,则说明红外成像设备达到了地面分辨率指标要求,否则说明红外成像设备未达到地面分辨率要求。
3.2 收容宽度指标折算
收容宽度的指标这算可由两种方式进行,一种为在样本图像的横向有效边缘选择一明显的地标,测量其地面实际横向距离,再根据折算公式可推算出机载作业时的收容宽度值;第二种方法为在垂直于载机航向,以已知相同间隔距离在地面铺设地标,并测量其经纬度,在样本图像中,根据靶标所在像素,计算出整幅样图的收容宽度值。最终再根据实际飞行高度对其研制要求的指标进行折算。
4 结束语
本文给出了一种将它机作为载机平台,对机载红外行扫仪进行考核的试飞方法,该方法通过一系列性能指标折算等,验证机载红外行扫仪的性能指标是否满足需求,扩充并完善了机载红外行扫仪试飞评估体系与方式,对后续相关工作有一定指导作用。
参考文献:
[1]白宏刚.NIIRS的遥感系统像质预估与评价方法研究[D].西安电子科技大学,2010.
[2]王年.红外行扫仪[J].激光与红外,1993,22(4).
[3]郭岩龙.机载长波红外行扫仪光学系统设计[D].哈尔滨工业大学,2014.