模糊PID控制用于控制直流电机调速
2017-03-17杜旭峰姜长泓
杜旭峰, 姜长泓
(长春工业大学 电气与电子工程学院, 吉林 长春 130012)
0 引 言
直流电机由于其优良的调速特性,已广泛应用于工业,但对于直流电机转速的精准度、稳定性控制还有待提高,文中重点研究模糊PID算法对直流电机的控制[1]。PID即比例、积分、微分控制器,由于其具有简单性、稳定性和鲁棒性,是应用最广泛的控制器。然而对于未知、不确定性的应用场景设计一个精确的系统来实现其功能是相当困难的。对于直流电动机,因负载变化和未知参数的选择严重影响到速度控制器的控制效果。而模糊控制不需要严格的数学模型,因此,模糊PID控制器可以很好地解决这一数学模型。
1 直流电机
直流电机是一种最常见的在工业控制系统中所使用的电机。电枢电路在直流电机转子的自由体图如图1所示。
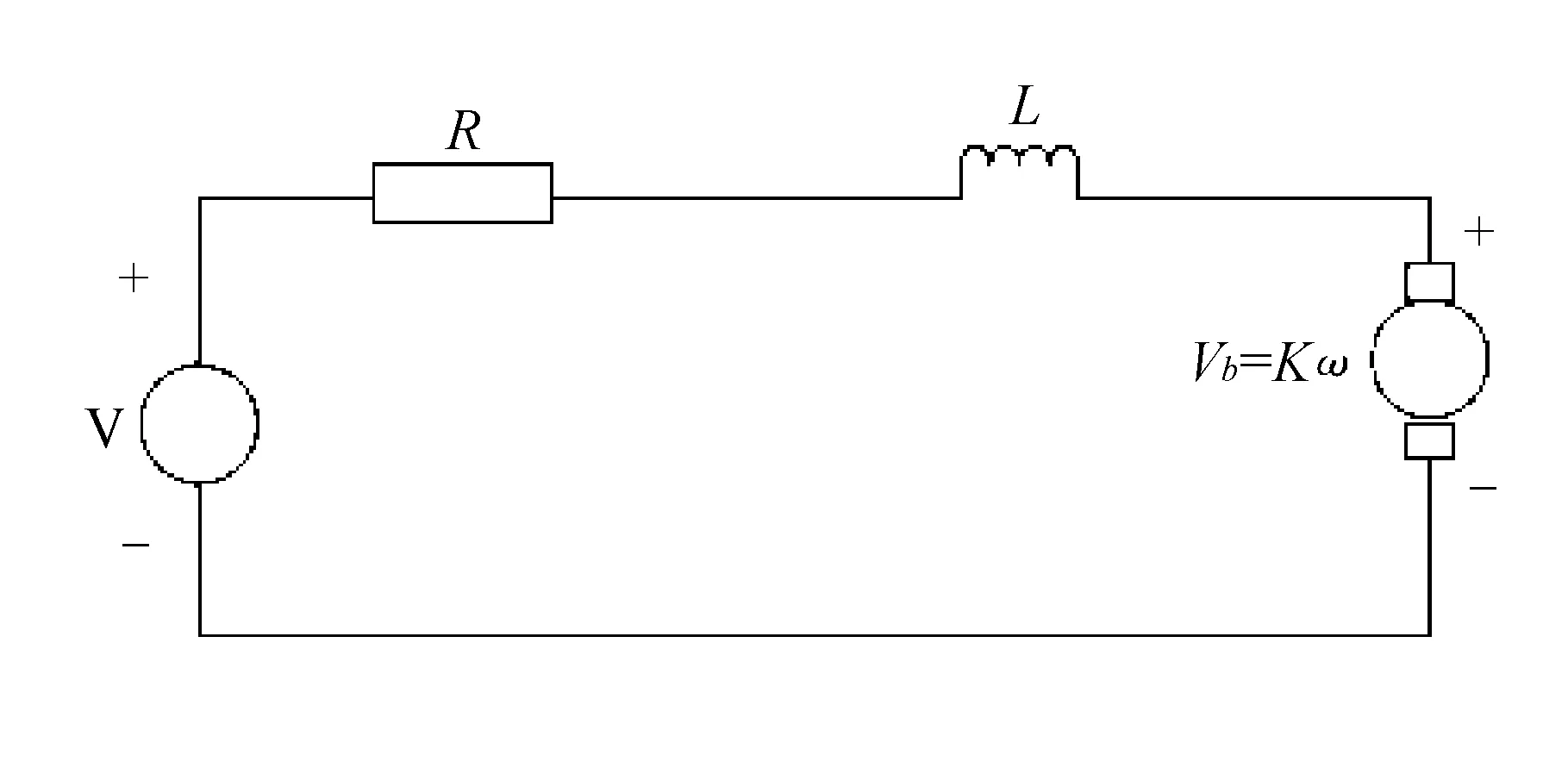
图1 直流电机示意图
采用的电机参数见表1。
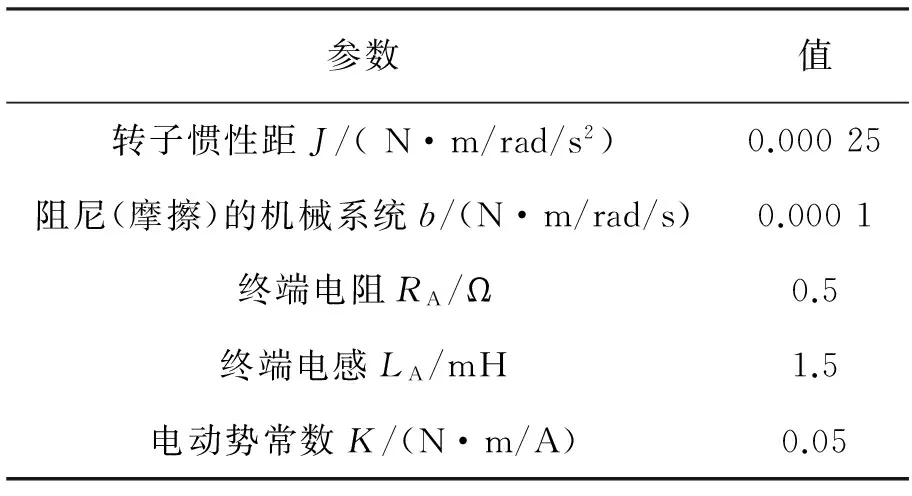
表1 直流电机参数
输入是电枢电压,测量的变量是弧度每秒的轴的角速度ω。电机的转矩为:
T=Ki
(1)
式中:i----电枢电流;
K----常数因子。
反电动势(EMF)Vb与其角速度相关:
(2)
直流电机的结构框图如图2所示。

图2 直流电机的结构框图
基于牛顿定律与基尔霍夫定律,由图2得如下方程:
(3)
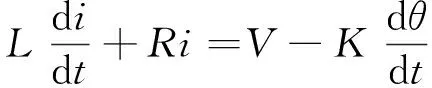
(4)
利用拉普拉斯变换,方程(3)和(4)可以写为:
Js2θ(s)+bs(θ)=KI(s)
(5)
LsI(s)+RI(s)=V(s)-Ksθ(s)
(6)
从式(6)推出:
(7)
代入式(5),得到如下:
(8)
模糊PID控制直流电机系统框图如图3所示。

图3 模糊PID控制直流电机系统框图
由图3易得,从输入电压的传递函数V(s)到角速度。
(9)

(10)
2 控制原理
2.1 模糊PID控制直流电机转速系统模型
为了提高直流电机的精度和动态性能,系统对直流电机速度采用闭环控制(见图1)。 在系统中设置了转速模糊PID控制器,用来调节转速。给定速度与速度的反馈量形成偏差ΔK,模糊PID控制器调节后产生电流参考量,该参考量是通过电流反馈量经电流调节后形成PWM占空比的控制量,从而实现对BLDCM的控制。电流反馈是根据电流霍尔传感器检测直流母线上的电流来实现的。速度反馈通过BLDCM自带的霍尔传感器输出的位置量经过计算后得到。另外,霍尔传感器输出的位置量还用来控制直流电机的换相控制。
2.2 模糊控制器设计
模糊逻辑是模仿人的经验去解决控制工程问题的方法。模糊控制采用一个简单的规则:“如果X与Y因此得到Z”来解决问题,而不是试图产生控制系统数学模型的方法。模糊控制模型是基于经验的,相比其他控制模型更依靠操作者的经验而产生的一种控制模型。每一个模糊系统由4个主要模块组成,如图4所示。
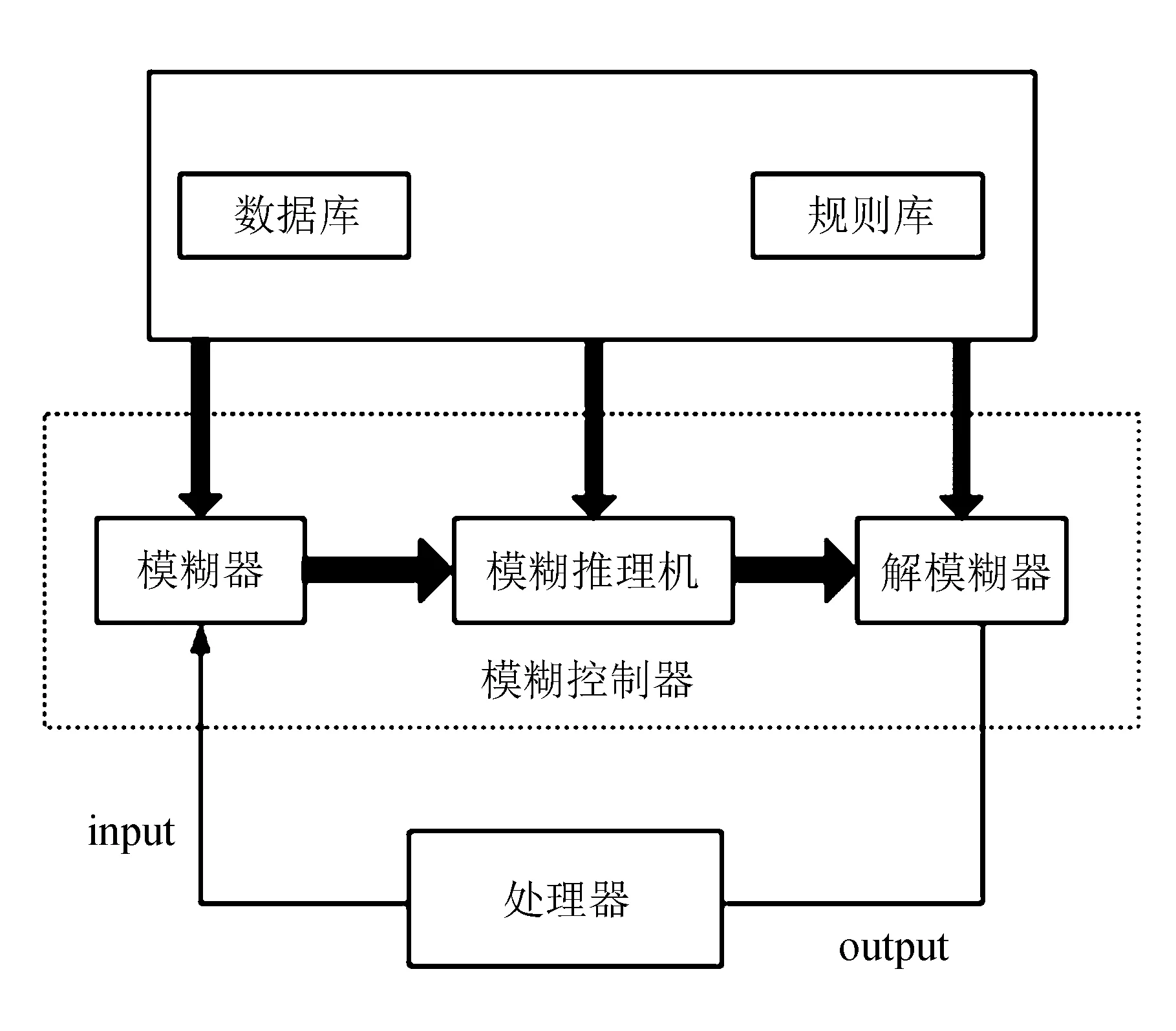
图4 模糊控制器原理图
2.3 PID控制器设计
PID控制原理是将理论值r(t)与实际输出值y(t)差值分别进行相应的比例、积分、微分运算,然后进行线性组合形成的控制变量,再对被控对象进行控制。PID的精确与否与比例、积分、微分各自对应的系数KP,KI,KD取值有关[2-4]。
控制器控制方程:
e(t)=r(t)-y(t)
(11)
控制器时域输出:
(12)
PID控制器原理如图5所示。
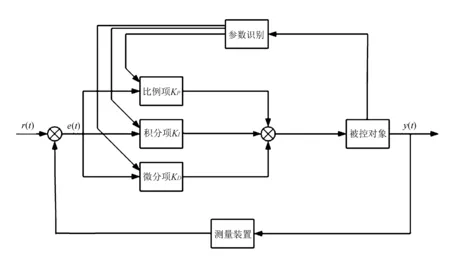
图5 PID控制器原理图
由图5可知,当被控对象参数变化时,可通过调整控制器相应参数进行校正,使系统获得满意的效果,算法简单,计算量小,且控制准确。PID要求精确的数学模型,在数学模型不清楚的情况下,将降低控制性能。模糊PID控制方法将解决这一问题。
2.4 模糊PID控制设计
模糊PID控制器是以误差e和误差变化率Δe作为输入,PID的KP、KI、KD作为输出。通过e和Δe对PID的KP、KI、KD做实时的修正。而修正过程运用模糊进行在线修正,这就构成了模糊PID控制器[5-7],如图6所示。
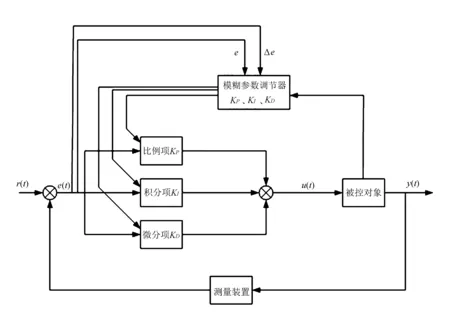
图6 模糊PID控制器原理图
由图6可知,该系统是由一个基本的PID控制器和模糊参数调节器组成的一个模糊PID控制器。控制目标使被控对象输出y(t)达到指定值R,PID控制器根据误差e(t)产生控制信号,从而控制被控对象,同时模糊参数调节器调节相应KP、KI、KD参数。
为了进一步提高系统的响应或执行速度,采用改进的模糊控制器。控制器原先控制的是KP、KI、KD这3个参数,而现在控制的是KP、KI、KD的增量,即ΔKP、ΔKI、ΔKD。这3个增量的变化比较小,较KP、KI、KD计算量明显减小。
3 仿真结果和分析
为了验证模糊PID控制器的适用性,对二次调节加载进行阶跃负荷的输出响应仿真,模糊PID控制、PID控制、阶跃输入对比如图7所示。
当加载系统在400 N·m转炬阶跃信号输入下,二次元件输出转矩的动态响应特性,图中给出了阶跃输入与控制模型的输出响应。可以看出,常规PID输出最大超调量为27.5%,控制系统调整时间16 s;模糊自适应PID输出最大超调量16.25%,控制系统调整时间11 s,且过渡过程平稳,模糊PID控制系统能较好地跟随[8-11]。
4 结 语
模糊PID控制兼具了模糊控制和PID控制的优点,克服了二次调节系统的非线性和时变性。通过建立试验台加载系统模糊PID控制模型进行仿真,研究表明,采用模糊PID控制后使得二次元件输出动态响应性能大大改善,显示出模糊PID良好的校正性能。
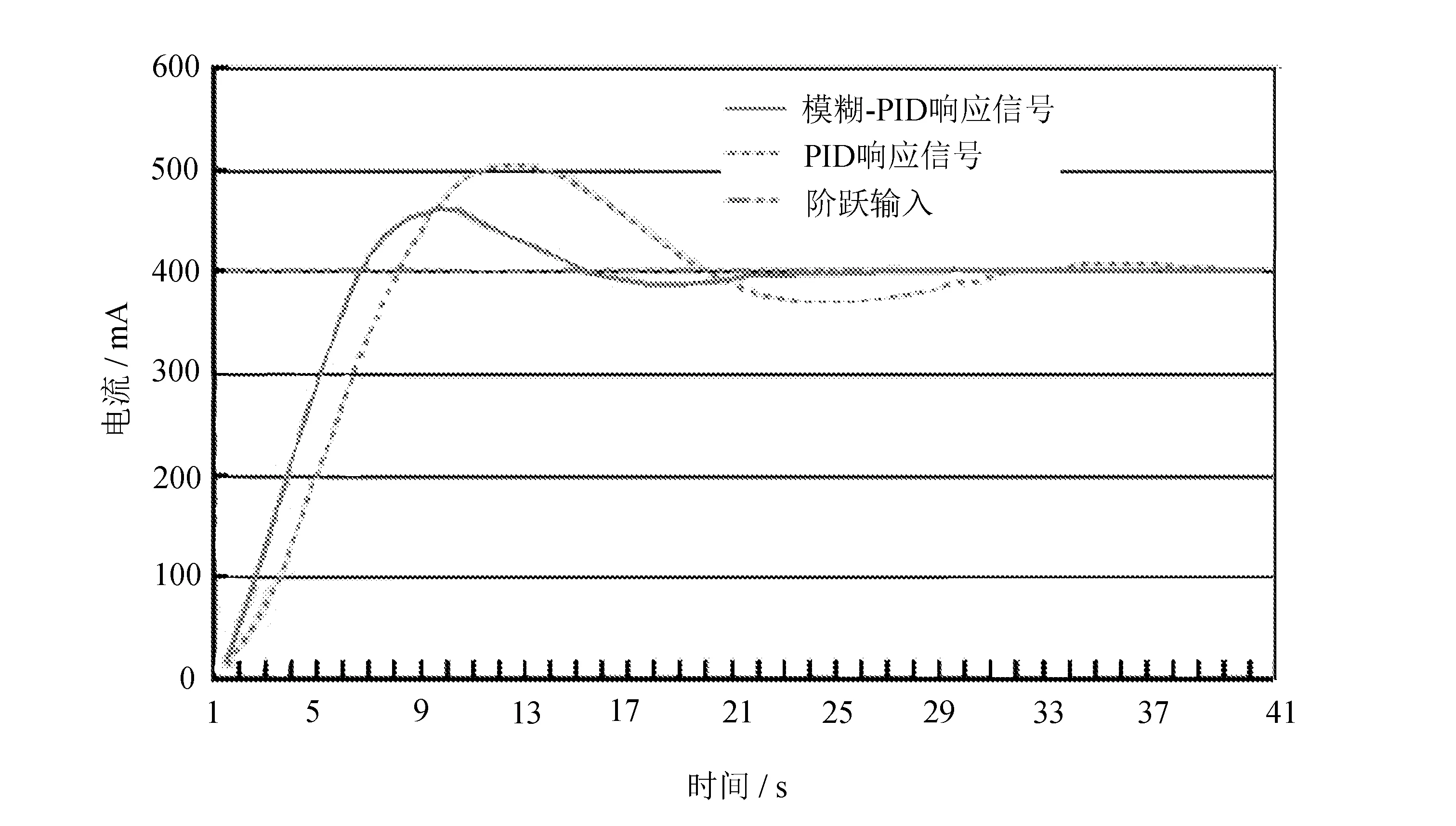
图7 模糊PID控制、PID控制、阶跃输入对比图
[1] 黄强,肖磊,万云.模糊PID与常规PID的Matlab 仿真比较与分析[J].桂林航天工业高等专科学校学报,2010,57:17-19.
[2] 张国良,邓方林.模糊控制及其Matlab应用[M].西安:西安交通大学出版社,2002.
[3] 杨白厚,杨超.模糊控制在工业中的应用[J].电气自动化,2005(1):27-30.
[4] 陈伯时.电力拖动自动控制系统,运动控制系统[M].北京:机械工业出版社,2008.
[5] 单冬.模糊控制原理及应用[M].北京:中国铁道出版社,2009.
[6] 李卓.基于Fuzzy推理的自调整PID控制器[J].控制理论与应用,2010(3):20-21.
[7] 李自淼.输油泵的PID控制技术研究[D].长春:长春工业大学,2014.
[8] 王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011(3):1-6.
[9] 刘璐,程方晓,王海彪.高精度PID控制恒流源[J].长春工业大学学报,2017,38(3):282-288.
[10] 李国勇.智能控制及其 MATLAB 实现[M].北京:电子工业出版社,2005.
[11] 陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.