双PWM同步电机调速系统的仿真研究
2017-03-14赵屹男边少锋
赵屹男,边少锋,曾 博
(海军工程大学导航工程系,武汉 430033)
双PWM同步电机调速系统的仿真研究
赵屹男,边少锋,曾 博
(海军工程大学导航工程系,武汉 430033)
针对基于传统变频器的不可控整流调速系统存在谐波污染和能量浪费的问题,构建了一种应用PWM 整流器的变频调速系统,在减小变频器对电网危害的同时,可以进一步实现能量的有效利用;阐述了双PWM调速系统的工作原理,采用电压电流双闭环控制策略,使功率因数接近为1,网测电流畸变小;通过Matlab/Simulink对其进行验证。结果表明该系统调速性能良好,对电网污染较小。
双PWM调速 双闭环控制 Matlab/simulink
0 引言
为了实现电机高效运行,变频调速技术应用日益广泛。针对不可控二极管的传统整流器作为电源端存在交流侧功率因数较低、交流侧电流波形畸变大,电流的谐波含量大、能量不可逆等缺点[1,2,3]。而以上缺点将导致无功功率增大,对电网造成了污染,影响电能质量;相比之下,基于全控型器件的 PWM整流器很好的克服了以上缺点,可以作为绿色电源。因此以PWM整流器作为供电前端的双 PWM 同步电机调速系统因为其网侧电流近似正弦、功率因数可控和可以实现能量的双向流动等特性而受到广泛关注[4]。
1 主电路拓扑及工作原理
本文采用了目前应用较为广泛的交-直-交的结构变频器模式。双 PWM变频调速系统分为PWM整流和PWM逆变两个部分,PWM整流器的作用是使网测电流正弦化、得到高功率因数、还可以减小网测电流谐波;而PWM逆变器对电机调速,包括了电机正好反转和加减速控制。
双PWM变频调速系统结构如图1所示。
1.1 三相 PWM 整流器的数学模型
PWM 整流器回路,可以得到以下回路方程:


图1 双PWM变换器拓扑结构
利用坐标旋转变换,将三相转化为两相电流的控制,就实现了电流的解耦,这样就可以单独控制dq轴电流,即简化了设计,又使系统具有更好控制特性[5]。
应用旋转坐标变换,将式(1)中的三相静止坐标系的数学模型转换到两相坐标系下的数学模型。在旋转坐标下,可得:

假设三相电网电压为:

取d轴的方向与合成电压方向一致,定为空间矢量的方向,则电网电压在同步旋转坐标系中的分量为:

因为参考轴与空间电压矢量同步旋转,三相坐标系的基波正弦量电压分解为d、q方向上的直流量,对d,q方向可分别采用两个PI调节器对其控制,分量的合成量即是指令电流。
而由式(4)模型可知,d,q轴电流互相耦合,不利于控制。为了消除d、q轴之间互相影响、实现对两轴的独立控制,应消除式(4)中的耦合项,以实现对电流的解耦。可令调制电压为:
电流的控制互不影响,电流内环实现解耦。综上,PWM整流器双闭环矢量控制系统结构框图如图 2 所示,电压外环的作用是维持直流侧电压恒定,测量电压反馈给指令端,与之比较控制输出电压的大小。上市式中给定信号为 id;而电流内环用来实现对指令电流的快速跟踪,可保证系统动态响应。
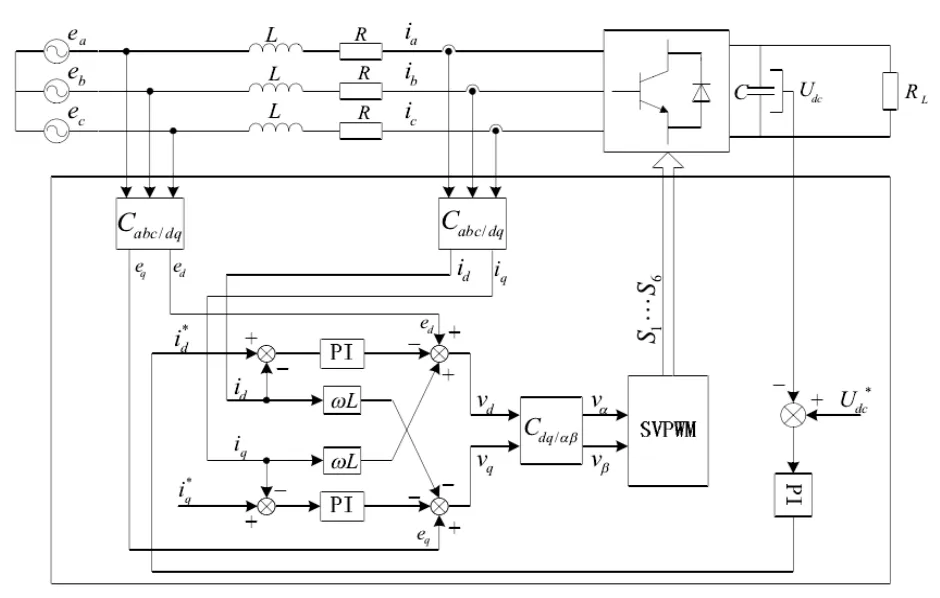
图2 SVPWM整流结构图
1.2 永磁同步电机dq坐标系下数学模型
由于永磁同步电机是一个具有非线性、多变量的系统,给永磁电机的控制带来了诸多不便,以采用矢量控制的方式,将同步电机模型转变类似直流电机的控制方式。可以分为转子磁链向和定子磁链定向两种方式,本文选用转子磁定向坐标系转换方式。经过转换可以将电流矢从交流正弦量转化为直流量,i分解为直轴分量和交轴分量,电磁转矩励磁磁通两分量彼此独立,使得励磁磁通与电磁转矩可以分别调节。
对以上数学模型进行dq变换,可得到矢量控
制模型:
定子电压方程模型:

其中sdusqusdisqisdψsqψ 是定子电压、电流与磁链在dq 坐标系下的值。
磁链方程为:
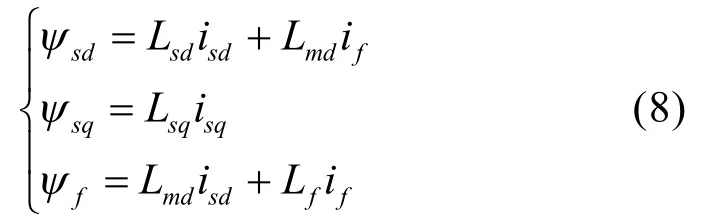
式中 LsdLsq为等效定子绕组dq轴自感,Lmd为转子绕组与d轴定子绕组间互感,为转子磁链,为虚拟励磁绕组等效的拟励磁电流。
转矩方程:

其中eT为电磁转矩,p为磁极对数。
由式(8)式可得

将式(10)代入式(9),得

运动方程:

式(12)中,LT为负载转矩,J为转动机械惯量,mω,eω分别为机械和电角速度。
2 控制系统设计
永磁同步电机常用的控制方法是磁场定向矢量控制[5],常用策略有:恒磁链、最大转矩、cosφ =1 ,= 0 等控制策略。使定子电流矢量落在转子磁场定向坐标系的q轴上,即令控制此外,对于隐极式永磁同步电机有。因而控制趋于稳定后,上节中式(9)可化简为

通常认为转子绕组与定子绕组间互感约等于转子绕组等效电感,忽略其中漏感,即= Lf,代入式(13)进一步化简有

将磁链方程(8)代入定子电压方程式(7)中,其中sdL ,,用sL表示,整理得:

由于上式互相耦合,为消除耦合,对电流采取解耦,对电流环控采用 PI 控制器,解耦规律如下:

解耦后,式(15)转化为:

经过转换,电流励磁分量与转矩分量解耦,实现可以独立控制,根据式(17)可得电流,sqi环结构图3:

图3 电流环结构图
由结构图知,速度的指令值与实测值之差信号经 PI 控制器后,可得到作为电流环的输入给定,电流环对转速有效控制。当实际转速小于指令值时,增大转速增加;当实际转速大于给定值时,减小降低转速,转速稳定指令值附近。负载转矩作为扰动作用于速度环的内部该控制结构能够有效抑制扰动[7]。

图4 速度环结构图
3 控制策略的选取
利用坐标变换将模型转换至转子磁场定向的旋转坐标系上,将被控电流矢量按坐标轴定向分解为磁链分量与转矩分别控制,使得电机气隙磁场与电磁转矩能够分别控制。在永磁同步电机的矢量控制系统中,采用id=0 控制策略,直轴电流环给定设为 0。此外,在电流环还进行了解耦[9]。为了验证上述控制策略的可行性。图5为电压电流双闭环PWM整流控制结构。

图5 同步电机控制结构图
4 仿真分析
为了验证上述方案的可行性和有效性,本文使用Matlab/simulink搭建了仿真平台,采用Matlab2013a版本,并进行仿真验证。系统的仿真的模型结构如图5所示。仿真参数:三相交流输入相电压为50 Hz/16 V(有效值),交流侧电感为16 mH,交流侧电阻为0.1 Ω,直流侧电容C为1000 μF,直流侧电容C0为500 μF。根据上文分析的整流器工作原理,PWM整流电路通过得到直流电压。即C两端电压U0通过PWM整流电路获得,则SVPWM所对应输入的直流电压为U0。总共的时间为3 s,在0 s空载启动,指令转速式400 r/min在1 s时加入1 s负载,在2 s时指令转速降为200 r/min。如图6所示为转速仿真结果,图7为整流器整流电压仿真效果,随着负载和转速指令的变化有较好的跟随性。图8是交流侧电压和电流结果,可以看出功率因数为1。

图6 电机转速仿真结果

图7 整流器的直流仿真结果

图8 交流侧的电压和电流仿真结果
通过仿真结果得知,双PWM同步电机调速系统由 PWM 整流器作为供电前端的双 PWM同步电机调速系统不仅实现了良好的调速性能,而且实现了网侧单位功率因数、网侧电流小畸变[10];
5 结论
本文分析了双PWM同步电机调速系统工作原理,整流器和同步电机均采用双闭环控制策略进行控制,并进行仿真验证。搭建了PWM整流器和同步电机的动态数学模型,用转子定向矢量控制方法,设计了电压环、电流环控制结构;对于永磁同步电机调速系统,本文采用= 0 的转子磁场定向矢量控制方法。对双 PWM 变频调速系统进行Simulink建模和仿真,仿真结果验证了控制策略正确性,达到了功率因数接近为1,网测电流畸变小的控制效果。

图9 PWM整流器仿真图

图10 同步电机仿真模型
[1] 万赟, 王晶鑫, 姜建国. 基于双 PWM 控制的转子侧变频调速系统研究[J]. 电力电子技术, 2009, 43(12): 55-57.
[2] 张崇巍, 张兴.PWM整流器及其控制[M].北京:机械工业出版社, 2012.
[3] 李铁栓, 杨文焕, 倪凯峰. 双 PWM 变频调速系统的研究与应用[J]. 能源研究与信息, 2012, 28(4): 232-236.
[4] Pan C T, Shieh J J. New space-vector control strategies for three-phase step-up/down AC/DC converter[J]. IEEE transactions on Industrial Electronics, 2000, 47(1): 25-35.
[5] 韦立祥, 孙旭东, 刘丛伟, 等. 一种新型的双 PWM三电平调速系统控制方法[J]. 清华大学学报: 自然科学版, 2002, 42(3): 295-298.
[6] 李帅, 李槐树, 李文艳, 等.三相升—降压PWM整流器SVPWM控制策略研究[J].电气传动, 2012, 42(6):22—26.
[7] 李帅, 李槐树, 李文艳, 等.三相升—降压PWM整流器Fuzzy—PI控制算法[J].电力系统及其自动化学报, 2012, 24(4):120—125.
[8] 孙亮. 基于 DSP 的双 PWM 变频调速系统研究与设计[D]. 华南理工大学, 2013.
[9] 王伟华, 肖曦. 永磁同步电机高动态响应电流控制方法研究[J]. 中国电机工程学报, 2013, 33(21): 117-123.
[10] 李昆鹏, 万健如, 宫成, 等. 双 PWM 变换器一体化控制策略[J]. 电机与控制学报, 2013, 17(4): 72-78.
Simulation of Synchronous Motor Speed Regulating System with Double PWMs
Zhao Yinan, Bian Shaofeng, Zeng Bo
(Department of Navigation, Naval University of Engineering, Wuhan 430033, China)
Aimed at the harmonic pollution and energy waste of uncontrolled rectifier speed regulating system of the traditional transducer, a variable-frequency speed regulation system with PWM rectifier is designed, which can reduce the harm of frequency converter to power grid, and further realize the effective utilization of energy. Working principle of the double PWM speed-adjusted system is expounded. By using voltage-current double close loop controlling strategy, the power factor is close to 1 and net current distortion is small. It is verified by Matlab/Simulink. The results show that the system has good speed adjustment performance, and low pollution to power grid.
double closed-loop control; Matlab/Simulink
TM921.51
A
1003-4862(2017)02-0011-05
2016-08-12
国家自然科学基金项目(41274013,41504029)
赵屹男(1989-),男,硕士在读,研究方向:电力电子与电力传动。E-mail: 1015084139@qq.com边少锋,男,博士,教授,博导。研究方向:控制工程。
