基于CKF的非线性船体变形惯性测量方法
2017-03-14徐博王艺菲单为
徐博,王艺菲,单为
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
基于CKF的非线性船体变形惯性测量方法
徐博,王艺菲,单为
(哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001)
船体变形的精确测量对于优化大型船体结构设计、不同部位的刚度设计以及提高舰船传递对准精度都有很现实的意义,而基于惯性传感器的角速率匹配法是测量船体变形的研究热点。针对大型船体中惯性测量单元存在大安装误差角的情况,建立非线性的船体变形模型以及光纤陀螺的漂移模型,采用CKF滤波方法进行估计;理论推导了UKF与CKF两种非线性滤波的估计精度,并进行了理论比较分析与仿真验证。结果表明随着航向安装误差角从30°增加到50°,静态误差角和动态误差角的估计精度始终保持在20″以内。与UKF相比,随着系统非线性程度的增强,CKF的性能优势更加明显。
船体变形;光纤陀螺;角速率匹配法;非线性模型;容积卡尔曼滤波
现代舰船的多个部位装有相应的攻防设备和导航系统等,这些设备的姿态、位置及运动参数等信息是由舰船中心的航姿设备来提供的,为了保证各子系统之间协调工作时的精度,精确的测量出船体变形是非常有必要的[1]。为了准确测量船体变形,国外在20世纪50年代,在研究中将不规则海浪视为由无数频率的正弦海浪叠加而成[2]。美国军用飞机采用应变补偿方法[3]。柳爱利[4]提出了一种将惯性测量单元安装在某战位点。吴伟等[5]提出了一种将陀螺漂移进行同步积分的方法。惯性船体变形测量领域取得了一定进展,但是目前绝大多数对船体变形角的估计研究仍局限于线性模型。朱昀炤[6]等利用粒子滤波对船体大角度变形进行测量,但是粒子存在退化现象,很难在实际中应用。容积卡尔曼滤波(cubature Kalman filter,CKF)具有算法实现简单、滤波精度高、收敛性好等优点,正逐渐成为当前及未来研究非线性估计问题的热点和有效方法。作者将CKF滤波与惯性测量匹配相结合,推导了大角度变形情况下的非线性船体变形测量模型,对无极卡尔曼滤波(unscented Kalman filter,UKF)和CKF滤波方法的估计精度进行了理论分析和对比,并在此基础上进行了仿真验证。
1 船体变形角的非线性模型
将两套惯性测量单元(inertial measurement unit,IMU)如图1所示安装在船体上。图中表明了变形角η与安装误差角φ、静态变形角φ和动态变形角θ之间的关系。图中还简要表明了中心IMU与局部IMU间的相对位置关系。
变形角的存在将会造成中心IMU处的载体坐标系oxmymzm与局部IMU处的载体坐标系oxsyszs失调,由oxsyszs到oxmymzm的方向余弦阵C,可由oxsyszs依次绕横轴、纵轴和竖轴旋转三次得到。由此可得
(1)

图1 IMU安装位置图Fig.1 Installation drawing of IMU
设中心IMU测得的绝对角速度在坐标系oxmymzm上的投影为ω1,局部IMU测得的绝对角速度在oxsyszs上的投影为ω2。
由于船体变形的存在,两套光纤陀螺测量单元输出角速率间的关系式:
(2)
因此两套光纤陀螺测量单元的输出角速率之差为
(3)
式中:C为坐标系oxsyszs相对于坐标系oxmymzm的坐标变换阵。由于此时矩阵C中各角度均包含了较大安装误差角,因此它们均为较大角度,所以矩阵C便不能进一步近似。此时,系统模型的量测方程便为非线性。同时也可以看出,随着安装误差角度的增加,系统的非线性程度增强。
根据船体变形角产生的原因,可将变形角分为静态变形角和动态变形角两部分。静态变形角主要是因船体因热胀冷缩以及老化作用等产生的,它是一个缓慢变化量。由于变化周期比较长,可将静态形变形角视为一个不随时间变化的常数,因此设静态变形角为φ,则有:
(4)
式中:i分别表示x、y、z轴,所以:
(5)
根据两套IMU之间存在安装误差角,通常情况下为一固定常值,模型可表示为
(6)
式中:i分别表示x、y、z轴,m为某一定值。由于它也是一个不随时间变化的量,因此可将它归类到静态变形角中。
船体动态变形角θ可用一个二阶马尔可夫过程描述。动态变形角自相关函数为
(7)
与此对应的变形滤波器可以写成:
(8)

陀螺漂移由常值漂移和随机漂移组成,它的存在是变形角测量误差的重要来源之一,因此有必要对其进行建模。
常值漂移是受恒定干扰产生的按某一规律持续的漂移量,可视为受白噪声驱动的一阶马尔可夫过程:
(9)
式中:ωε为一阶马尔可夫过程白噪声。因为漂移相关时间T比较长,所以IMU漂移可视为常数。因此:
(10)
随机漂移是频带相当宽的随机过程,一般用长时间测试的方差及相关函数表示,一般IMU随机漂移的自相关函数[10]为
(11)
式中:i=x,y,z,τ为相关时间,μi为不规则系数,表征漂移的复杂度。σi表征IMU漂移离散程度的均方差。上述IMU随机漂移的自相关函数对应的滤波器模型为
(12)
式(9)和式(12)就是IMU的误差模型。
(13)
即非线性系统的状态方程可以化简为

(14)
式中:A为状态矩阵,B为噪声输入矩阵,w(t)为系统噪声序列。A、B阵的具体形式表示为
式中:
其中:
因此,根据式(3)和式(14)构成了船体变形的非线性模型。
2 非线性惯性测量匹配法模型滤波
针对非线性系统模型,应用最广泛的是扩展卡尔曼滤波(extendkalmanfilter,EKF),但是对于高阶项的计算不仅很繁琐,而且容易出现计算错误,尤其是针对维数比较高的系统。
因此,针对船体变形的非线性模型,尤其在大安装误差角存在的情况下,传统的EKF滤波性能会大大下降。本节针对非线性模型给出CKF和UKF两种非线性滤波理论算法,然后基于泰勒展开对估计精度进行理论分析,并进行仿真验证。
2.1 基于泰勒展开式的CKF和UKF的估计精度

(15)

因此,CKF预测的f(X)的均值为
(16)
(17)
(18)
由于对称性,它的奇阶矩为零,因此有:
(19)

(20)

(21)
式中ξ为各分量之间的交叉项。从而CKF预测的f(x)的均值为
(22)
由推导CKF估计精度的过程可类似求得UKF的估计精度为
(23)
2.2CKF与UKF估计精度比较分析

对于积分公式来说,应该满足权值为正这一基本条件,定义稳定因子表示为
(24)
当I>1时,积分公式会引入大量的截断误差,由上面推导式可看出,要想比较两种方法的滤波精度只需要比较nk-1和(n+λ)k-1的大小。对于真实均值的四阶矩,为了补获大部分信息,UKF滤波过程中选择n+λ=3,其中n为状态变量维数,λ为微调因子。
当n<3时,nk-1<(n+λ)k-1,即UKF的滤波精度高于CKF;
当n=3时,nk-1=(n+λ)k-1,即UKF的滤波精度和CKF相当;
当n>3时,通过上文引入的稳定因子来分析,对于UKF,λ=3-n<0,权值ω0=1-n/3<0,ωi=1/2(n+λ),(i=1,2,…,2n),根据上式定义的稳定因子得:
(25)
由IUKF的表达式知,IUKF与状态维数n为线性关系,随着n的线性增加,积分的数值估计中出现很大的误差,积分公式精度变差。
对于CKF滤波,当n为任何数时,其权值ωi=1/2n>0,所以稳定因子IUKF:
(26)
由以上分析可以看出,当状态变量的维数大于3维时,CKF的滤波精度会高于UKF。
3 基于CKF的船体变形测量仿真
仿真条件设置如下:假设舰船横摇、纵摇、航向三个方向的摇摆周期分别为8、6、10s,摇摆幅度最大分别为4°、2°、3°。初始位置为北纬45.779 6°,东经126.670 5°,初始航速为沿北向10m/s,陀螺常值漂移均为0.005 (°)/h,随机漂移均取0.01 (°)/h。动态变形角主频取为0.16Hz。采样周期为0.1s,仿真时间为600s。由于航向安装误差角较大,忽略航行静态变形角。纵向、横向静态变形角分别为0.5°、0.8°,航向(含安装误差角)依次为30°、40°、50°,仿真结果如图2所示。
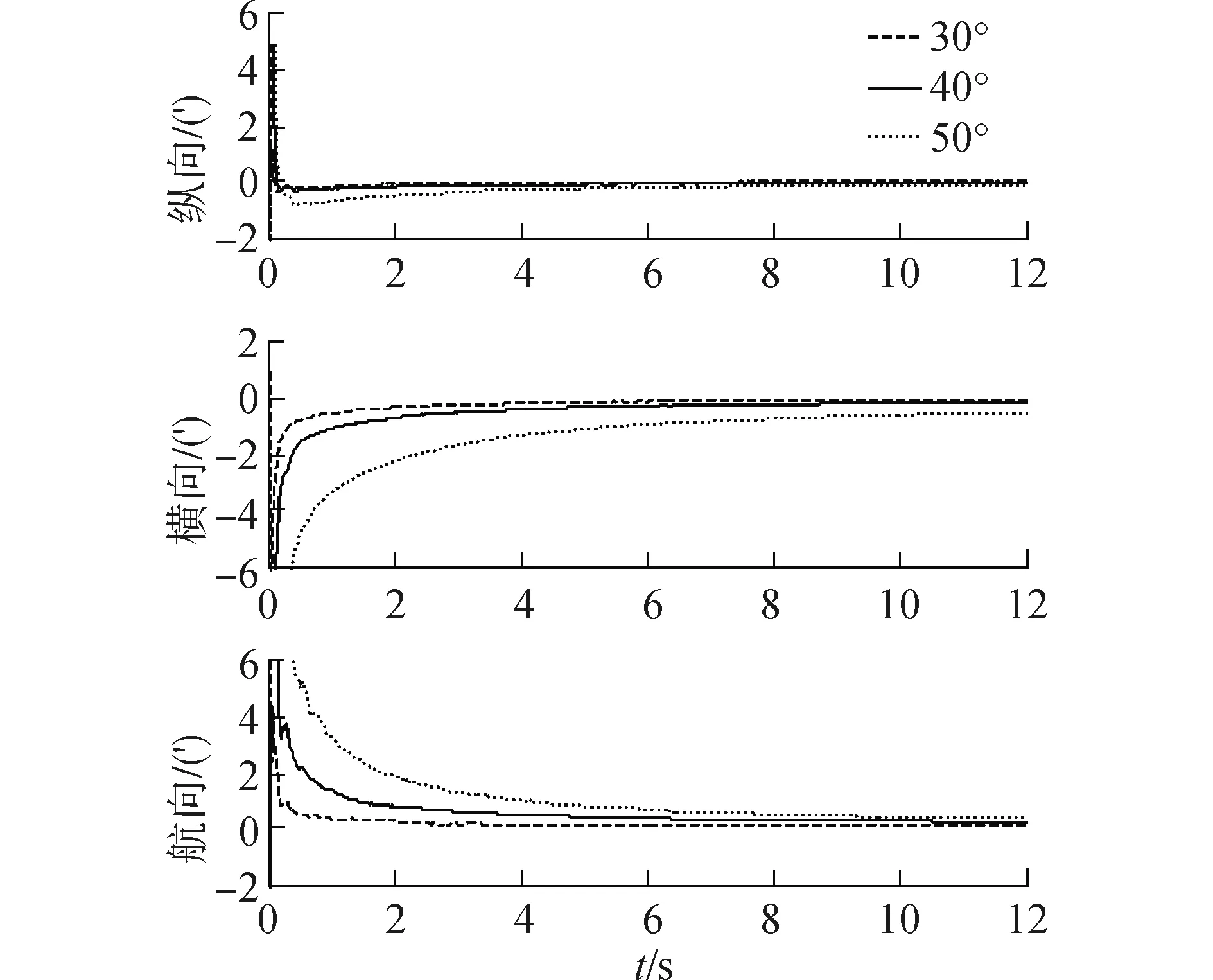
图2 基于CKF的静态变形角估计误差曲线Fig.2 CKF-based estimation error curve static deformation angle
由仿真结果可以看出:
1)航向(含安装误差角)静态变形角由30°增至40°再增至50°,静态变形角三个方向估计精度均出现了下降,相应收敛速度也下降。其中,纵向方向变化最小,精度始终保持在15″以内。而横向和航向下降幅度基本相当,精度最终达到20″以内。
2)在安装误差角角度增加过程中,动态变形角横向估计精度有所下降,但最终也稳定在15″以内。纵向和航向精度变化不明显,基本稳定在10″以内,但收敛时间均有所加长。
4 基于CKF滤波与UKF滤波的仿真
本节针对前文的非线性模型,分别进行了基于UKF和CKF的变形测量仿真与分析,并对仿真结果进行了对比。仿真条件设置如下:假设舰船横摇、纵摇、航向三个方向的摇摆周期分别为8、6、10s,摇摆幅度最大分别为4°、2°、3°。初始位置为北纬45.779 6°,东经126.670 5°,初始航速为沿北向10m/s,陀螺常值漂移均为0.005 (°)/h,随机漂移均取0.01 (°)/h。主频取为0.16Hz。采样周期为0.1s,仿真时间为600s。纵向、横向、航向静态变形角分别为0.5°、0.8°,航向(含安装误差角)为30°,总变形角UKF、CKF估计误差曲线如图3所示。
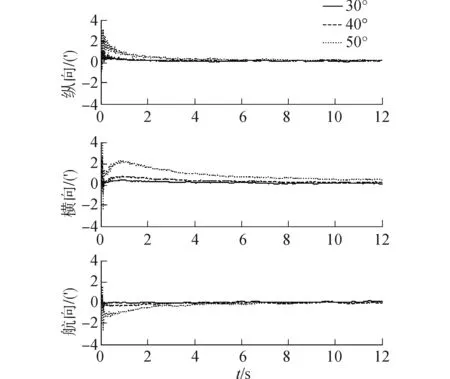
图3 总变形角UKF、CKF估计误差曲线Fig.3 UKF, CKF total deformation angle estimation error curves
由仿真结果可以看出:
1)在纵向和横向,总变形角的估计精度CKF最终达到10″以内,而UKF最终达到15″以内,CKF估计精度高于UKF;收敛速度CKF也要显著快于UKF。
2)在航向方向,总变形角的估计精度,CKF稍好于UKF,最终达到15″以内,而且估计误差曲线的平稳性也要好于UKF,但是收敛速度优势不明显。
为使比较更有说服力,现针对同一模型,分别用CKF和UKF进行了50次蒙特卡洛仿真,统计收敛时间和估计精度。其中收敛时间是以总变形角纵向、横向和航向分别达到0.5′、1′、1′的时间为基准,估计精度是以总变形角在第600s时的估计精度为基准。收敛时间和估计精度统计图如图4、5所示。

图4 UKF、CKF各50次滤波收敛时间情况统计Fig.4 UKF, CKF 50 times filter convergence time

图5 总变形角UKF、CKF各50次滤波估计精度统计Fig.5 UKF, CKF 50 times the total distortion angle estimation precision filter
由仿真结果可以看出:
1)在纵向上,CKF的收敛时间均值在15s内,所有散点值也都在30s以内。UKF的收敛时间均值在75s以内,所有散点值在100s以内。CKF滤波在纵向上的收敛时间有明显优势。
2)在横向上,CKF的收敛时间均值在75s内,所有散点值也都在100s以内。UKF的收敛时间均值在210s以内,所有散点值在250s以内。可以看出,CKF的收敛时间是少于UKF的。而且,在纵向上的优势要好于横向。
3)在航向上,CKF的收敛时间均值在75s内,所有散点值也都在100s以内。UKF的收敛时间均值在90s以内,所有散点值在150s以内。CKF的收敛时间的散点图和UKF的差距不大,但从二者收敛时间的均值可以看出,CKF的收敛时间还是快于UKF的。
4)在纵向上,CKF的估计精度均值在2.5″内,所有散点值也都在5″以内。UKF的估计精度均值在5″以内,所有散点值在10″以内;在横向上,CKF的估计精度均值在2.5″内,所有散点值也都在5″以内。UKF的估计精度均值在8″以内,所有散点值在15″以内;在航向上,CKF的估计精度均值在5″内,所有散点值也都在10″以内。UKF的估计精度均值在8″以内,所有散点值在15″以内。由此看见CKF的估计精度在三个方向上都高于UKF。
5 结论
本文建立了基于惯性测量匹配法的非线性模型,CKF非线性滤波方法的估计精度,并进行了一系列的仿真,同时与UKF滤波进行了理论对比和仿真对比。仿真结果表明:
1)安装误差角增加时,静态变形角和动态变形角的收敛时间有所增加,收敛精度有所降低,但仍在15″以内。表明CKF滤波对非线性模型的估计是有效的。
2)UKF滤波与CKF滤波相比,CKF估计精度高,收敛过程较为平稳,且收敛速度快。
3)CKF和UKF的50次蒙特卡洛仿真的结果,明确可以看出,CKF滤波收敛时间75s以下,UKF滤波收敛时间100s以上,200s以下;CKF滤波的收敛精度是UKF滤波的收敛精度的一半。由以上结论可以看出,对于非线性船体变形的CKF滤波有更好的估计效果。
[1]GAO Wei, ZHANG Ya, WANG Jiangguo. A strapdown interial navigation System/Beidou/Doppler velocity log integrated navigation algorithm based on a cubature Kalman filter[J]. Sensors, 2014, 14(1): 1511-1527.
[2]柳爱利, 戴洪德. 基于惯性传感器输出匹配的舰船变形估计方法[J]. 传感技术学报, 2011, 24(1): 145-148. LIU Aili, DAI Hongde. Deformation estimation of warship based on the match of inertial sensors′output[J]. Chinese journal of sensors and actuators, 2011, 24(1): 145-148.
[3]仝佩. 基于水弹性力学理论的船体动态形变角研究[D]. 长沙: 国防科学技术大学, 2011: 26-31. TONG Pei. Research of dynamic distortion on a ship based on the theory of hydro-elasticity[D]. Changsha: National University of Defense Technology, 2011: 26-31.
[4]聂琦. 非线性滤波及其在导航系统中的应用[D]. 哈尔滨: 哈尔滨工程大学, 2008: 1-5. NIE Qi. Nonlinear filtering and its application in navigation system[D]. Harbin: Harbin Engineering University, 2008: 1-5.
[5]ARASARATNAM I, HAYKIN S. Cubature Kalman filters[J]. IEEE transactions on automatic control, 2009, 54(6): 1254-1269.
[6]LIPTON A H. Alignment of inertial systems on a mobile base[R]. Moscow: Nauka, 1971: 126-132.
[7]WANG Bo, XIAO Xuan, XIA Yuanqing, et al. Unscented particle filtering for estimation of shipboard deformation based on inertial measurement units[J]. Sensors, 2013, 13(11): 15656-15672.
[8]MOCHALOV A V, KAZANTSEV A V. Use of ring laser units for measurement of moving object deformations[C]//Proceeding of SPIE 4680, Second International Conference on Lasers for Measurement and Information Transfer. St. Petersburg, Russia: SPIE, 2002: 85-92.
[9]朱昀炤, 汪顺亭, 繆玲娟, 等. 船体变形测量技术综述[J]. 船舶工程, 2007, 29(6): 58-61. ZHU Yunzhao, WANG Shunting, MIAO Lingjuan, et al. Review of measuring technique for ship deformation[J]. Ship engineering, 2007, 29(6): 58-61.
[10]吕玉红. 船用捷联系统传递对准方法及实验研究[D]. 哈尔滨: 哈尔滨工程大学, 2010: 25-36. LYU Yuhong. Research of the transfer alignment method and experiment base on ship strap-down navigation system[D]. Harbin: Harbin Engineering University, 2010: 25-36.
[11]WU Wei, CHEN Sheng, QIN Shiqiao. Online estimation of ship dynamic flexure model parameters for transfer alignment[J]. IEEE transactions on control systems technology, 2013, 21(5):1666-1678.
[12]吴伟, 秦石乔, 杨云涛, 等. 船体变形测量中激光陀螺误差的抑制机理[J]. 中国惯性技术学报, 2014, 22(5): 665-670. WU Wei, QIN Shiqiao, YANG Yuntao, et al. Error suppression mechanism for ring laser gyro in ship deformation measurement[J]. Journal of Chinese inertial technology, 2014, 22(5): 665-670.
[13]WU Yuanxin, HU Dewen, WU Meiping, et al. A numerical-integration perspective on Gaussian filters[J]. IEEE transactions on signal processing, 2006, 54(8): 2910-2921.
[14]MU Jing, CAI Yuanli. Iterated cubature kalman filter and its application[C]//Proceeding of the 2011 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems. Kunming: IEEE, 2011: 33-37.
[15]柳明, 刘雨, 苏宝库. 改进的UKF在惯导平台误差模型辨识中的应用[J]. 控制与决策, 2009, 24(1): 129-132, 136. LIU Ming, LIU Yu, SU Baoku. Application of improved UKF in error model identification of inertial navigation platform[J]. Control and decision, 2009, 24(1): 129-132, 136.
CKF-based inertial measurement methods to determine nonlinear hull deformation
XU Bo,WANG Yifei,SHAN Wei
(College of Automation, Harbin Engineering University, Harbin 150006, China)
Accurate measurement of the deformation of a hull structure is of real significance in efforts to optimize large hull designs, maximize the stiffness of different parts, and improve the alignment and transfer precision of ships. Methods that measure hull deformation based on inertial angular rate sensor matching are a current research hot-spot. In the case of large misalignment angles for large hull inertial measurement units, a non-linear hull deformation model and a drift model of FOG were established using the CKF filtering method for estimation. The estimation accuracies of two nonlinear filtering methods, i.e., UKF and CKF, were then theoretically derived, compared, and simulated. Results showed that as the heading misalignment angle is increased from 30° to 50°, the estimation accuracies of the static and dynamic error angles remain within 20". Compared with that of UKF, the performance advantage of CKF becomes more apparent following enhancement of the degree of non-linearity of the system.
hull deformation; fiber optic gyroscope; angular rate matching method; nonlinear model; cubature Kalman filter(CKF)
2016-01-14.
日期:2016-11-16.
国家自然科学基金项目(61203225);黑龙江省自然科学基金项目(QC2014C069);黑龙江省博士后科研启动资金(LBH-Q15032);海洋工程国家重点实验室开放课题(1616).
徐博(1982-),男,副教授,博士生导师; 王艺菲(1991-),女,硕士研究生.
王艺菲,E-mail:huihui199108@126.com.
10.11990/jheu.201601056
http://www.cnki.net/kcms/detail/23.1390.u.20161116.1613.006.html
TN713+1
A
1006-7043(2017)02-0247-06
徐博,王艺菲,单为. 基于CKF的非线性船体变形惯性测量方法[J]. 哈尔滨工程大学学报, 2017, 38(2): 247-252. XU Bo,WANG Yifei,SHAN Wei. CKF-based inertial measurement methods to determine nonlinear hull deformation[J]. Journal of Harbin Engineering University, 2017, 38(2): 247-252.
