面向新颖成像模式敏捷卫星的联合执行机构控制方法
2017-03-12范国伟常琳杨秀彬王旻王绍举
范国伟 常琳 杨秀彬 王旻 王绍举
航天光学遥感技术正广泛应用于军事侦察、海洋海岸测绘、地质调查、目标点定位等领域.目前,我国遥感光学卫星通常采用星下点及侧摆的推扫成像模式,其要求卫星姿态控制系统具有一定的姿态机动性及较高的机动后姿态稳定性.为解决此问题,现有技术主要是通过预留足够长的机动及稳定时间,以克服挠性附件或干扰力矩等造成的姿态波动,但这极大地限制了遥感卫星的应用效能.新颖的成像模式如多目标、凝视及非沿轨曲线成像等,需要卫星姿态控制系统在规定时间内完成卫星姿态的快速机动并保持较高精度的稳定性,或实现对期望姿态角及角速度的高精度跟踪控制,且对各种建模不确定性及外部干扰等具有较强的鲁棒性,这对卫星姿态控制系统的设计提出了新的挑战.
为实现卫星姿态的快速机动,以大力矩CMG(Control moment gyroscopes)为执行机构的敏捷卫星越来越受到关注和研究,但奇异性问题一直制约了其工程应用[1−2].按照在奇异面附近的处理方式,目前主要方法可分为奇异回避操纵律、奇异逃离操纵律和混合操纵律,但每种方法均有其自身的限制或缺点[3−4],如何设计高效的规避奇异性的操纵律是当前研究热点.此外,由于CMG群的安装、内部摩擦以及框架角动量和动量轮框架轴方向简化等导致的非参数不确定性,通常会导致CMG群在小力矩输出时的不准确性,影响整星控制精度.在大力矩执行机构作用下,敏捷卫星控制面临的另一个重要问题是挠性附件的振动抑制问题.挠性敏捷卫星姿态控制是一个强耦合、具有不确定性的非线性问题.为了完成各种在轨运行任务,卫星姿控系统必须具备良好的控制性能,控制算法不仅要满足机动或成像过程中对姿态的约束,抑制非线性、不确定性等因素的影响,还要尽可能地减小挠性附件振动.解决该问题的一种有效途径是采用轨迹规划与鲁棒跟踪相结合的控制策略.
在轨迹规划研究中,传统的基于极小值原理的最优控制方法适用于动力学模型较简单的系统,对于卫星姿态动力学的强耦合非线性特性,难于进行最优轨迹的求取.在现有的卫星姿态规划问题研究中,多数研究将重点着眼于轨迹规划的直接法.其中,以伪谱法为原型实现最优的轨迹规划是一种行之有效的研究手段.该方法将成像任务的各种姿态约束、动力学方程等转化为等式或不等式约束,通过离散化的方式实现最优轨迹的求解.常用的伪谱法主要有Chebyshev伪谱法、Legendre伪谱法、Radau伪谱法和Gauss伪谱法[5−6].
在获得最优规划轨迹的基础上,若采用开环控制方式,由于建模误差、各种不确定性及空间干扰的存在,卫星姿态并不会按照设计的最优轨迹运动,必须采用具有鲁棒性的控制方法实现高精度的轨迹跟踪.针对卫星姿态跟踪控制问题,为了克服模型参数的不确定性及外部干扰等,目前现有研究采用的主要方法有最优控制、自适应模糊控制、Lyapunov方法、退步法、内模法、滑模控制方法、终端滑模控制方法和模型预测控制方法等[7−13],同时也取得了丰富的研究成果.滑模控制方法由于对结构参数不确定性和未建模动态具有较好的鲁棒性,其在卫星姿态控制中受到较多研究.但是,该方法在处理各种约束时会存在一定的设计困难.
敏捷卫星姿态控制过程中通常会受到很多约束,如姿态执行机构的力矩输出能力、为防止敏感器失效而对机动角速度的限幅等,同时为提高卫星在轨应用效能,通常以某种“最优”方式对姿态控制过程加以约束,这些限制的存在使得控制算法的设计存在一定的挑战.模型预测控制方法(Model predictive control,MPC)[14−15]由于具有处理硬约束的能力,且通过在线滚动优化方式实现控制律的求取,能够获得保守性较小的结果,提升控制性能,受到控制界的广泛关注.但在卫星姿态控制问题中的应用尚待进一步研究[16−17].
考虑到由于装调和标定精度以及动力学建模简化和未建模动态等因素造成的CMG群小力矩输出不精确等问题,本文针对新颖灵巧成像模式对卫星姿态控制的高性能需求,以金字塔构型CMG群及反作用飞轮为联合执行机构的挠性敏捷卫星为研究对象,提出一种融合最优轨迹规划和滚动跟踪控制思想的复合控制方法.充分发挥CMG群的大力矩输出特性及反作用飞轮的高精度力矩输出特性,通过前馈与反馈控制的结合,实现挠性敏捷卫星的姿态快速机动或对期望姿态的高精度跟踪控制.
1 新颖成像模式姿态控制需求分析
1.1 多目标成像对卫星姿态大角度快速机动需求
敏捷卫星在执行多目标成像任务(如图1)之前,通常设定提前固定的时间进行姿态的机动,即姿态机动的开始时间是已知的.此外,姿态机动开始时刻卫星通常为三轴对日姿态或对地指向姿态(多目标的成像姿态),依据卫星当前时间及对日坐标系定义或对地成像任务,可计算出卫星初始机动姿态,即机动时刻的卫星姿态也是已知的.成像目标姿态通常由地面指令上注,即期望的卫星姿态是已知的,而卫星姿态达到目标姿态的时间是未知的.在不激起挠性附件振动或能量最优条件下,通常希望达到期望目标姿态的时间最小.
综上,多目标成像中的每次卫星姿态大角度快速机动需求可归结为:初始时刻及状态已知,终端目标状态已知,终端时间待优化的一类约束优化问题.
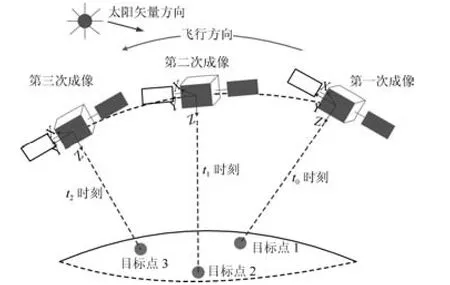
图1 多目标快速机动成像示意图Fig.1 Diagram of multi-target rapid maneuvering imaging
1.2 凝视或非沿轨成像对卫星姿态高精度跟踪控制需求
敏捷卫星在执行如凝视、非沿轨曲线等灵巧成像任务(图2、图3)时,成像开始或结束时刻及对应的姿态是预先规划的,即是已知的.此外,为满足成像任务过程中对某些特定目标的定时指向,卫星姿态需要在某些特定时刻具有特定的姿态,即成像过程中某些时刻的相应姿态也是固定的,且预先已知.
综上,灵巧多模式成像对卫星姿态的高精度跟踪控制需求归结为:成像开始时刻、结束时刻及相应的姿态是给定且已知的,同时成像过程中某些指定时刻的姿态也是固定且已知的一类约束优化问题.
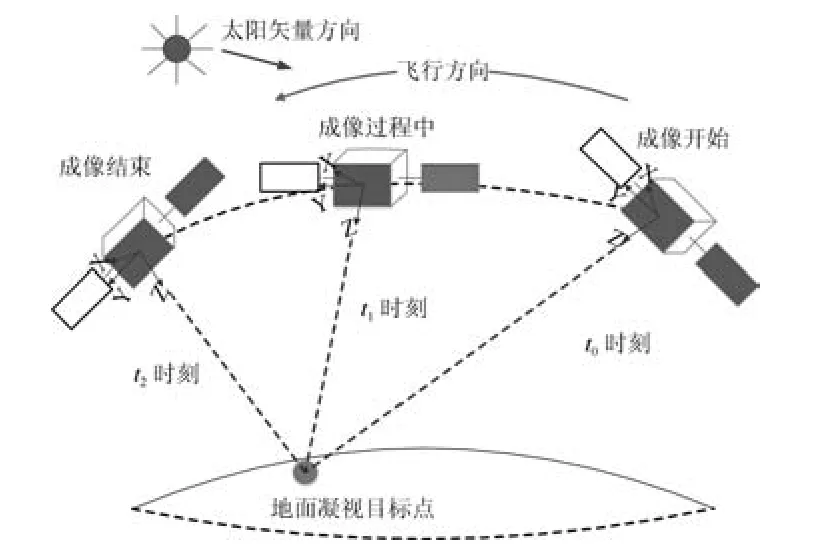
图2 固定目标凝视成像示意图Fig.2 Diagram of fi xed-target staring imaging
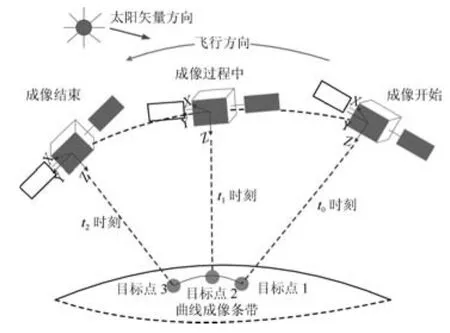
图3 非沿轨曲线成像示意图Fig.3 Diagram of non-track curve imaging
2 联合执行机构姿态控制策略
本文提出的控制方案框图如图4所示.控制方案分为前馈控制通道和反馈控制通道.前馈控制主要基于建立的非线性挠性卫星姿态动力学及运动学方程,在满足成像对卫星姿态及姿态角速度约束的情况下,利用Legendre伪谱法实现某种最优评价指标下的卫星姿态角、角速度及CMG群框架轴角速度的规划.通过将规划得到的CMG群框架角速度作用于星体,获得使敏捷卫星姿态及角速度满足成像约束的主控制力矩.由于参考卫星模型与实际卫星之间的偏差、CMG群力矩输出的不准确性等因素,在CMG群主控制力矩作用下的卫星姿态和姿态角速度并不能严格与规划姿态吻合,存在一定的偏差.为消除这种偏差,在反馈控制通道中,将利用NMPC方法设计高精度的反作用飞轮跟踪控制律.通过前馈和反馈控制的复合,实现满足多种灵巧成像模式对卫星姿态需求的优化控制.
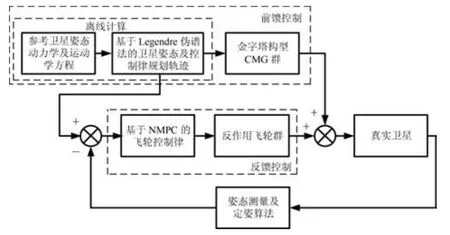
图4 挠性敏捷卫星姿态控制方案框图Fig.4 Diagram of attitude control scheme for fl exible agile satellite
3 控制模型的建立
3.1 挠性卫星姿态动力学及运动学建模
本文研究对象为以金字塔构型CMG群及反作用飞轮为联合执行机构的挠性敏捷卫星.以惯性坐标系为参考坐标系,建立的具有联合执行机构的挠性卫星姿态动力学方程如式(1)所示:

式中,I为卫星的转动惯量矩阵,w为星体三轴姿态角速度,σ为挠性附件与星体的刚柔耦合矩阵,η为挠性附件在模态坐标系下的位移,HCMG为金字塔构型CMG群的三轴角动量,HF为反作用飞轮系统的三轴角动量,Td为空间干扰力矩.
定义CMG群的控制力矩为

反作用飞轮系统的控制力矩为

其中

在模态坐标系下,建立的挠性附件振动的动力学方程如式(5):

式中,ζf和wf分别为挠性附件模态坐标系下的阻尼比矩阵与振动频率矩阵.
考虑到以欧拉角描述卫星姿态存在奇异性等问题,本文采用四元数描述的运动学模型来表示卫星的姿态变化.选取惯性系为参考坐标系,则有如式(6)的基于四元数的卫星姿态运动学方程:

其中,q=[q0q1q2q3]T定义为姿态四元数,q0为标量,q1,q2,q3为三维矢量的分量,整星的绝对角速度在三轴分量为w=[wxwywz]T.
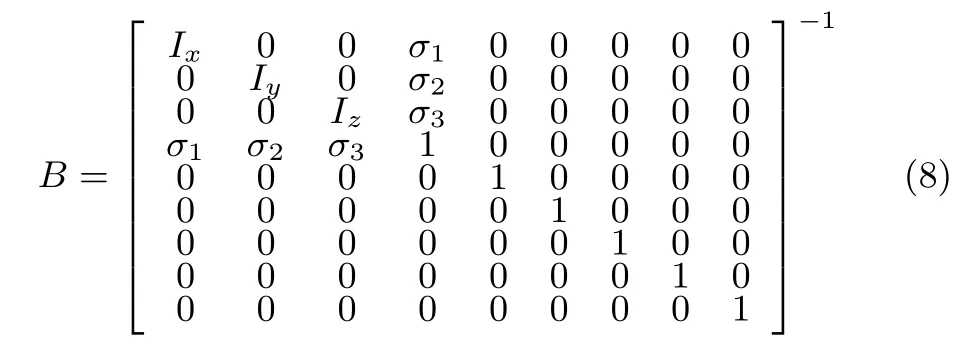
考虑到卫星转动惯量主要在其主轴上,为简化计算量,在规划算法及跟踪控制器设计时取星体的转动惯量矩阵为I=diag{IxIyIz},且假设三轴反作用飞轮沿惯量主轴正交安装.定义wη=˙η为挠性附件在模态坐标系下的角速度,并取状态变量x=[w wηq η]T,在不考虑空间干扰力矩影响情况下,具有联合执行机构的挠性卫星姿态动力学及运动学可以归结为式(7)的非线性方程:

式中,符号定义如下:
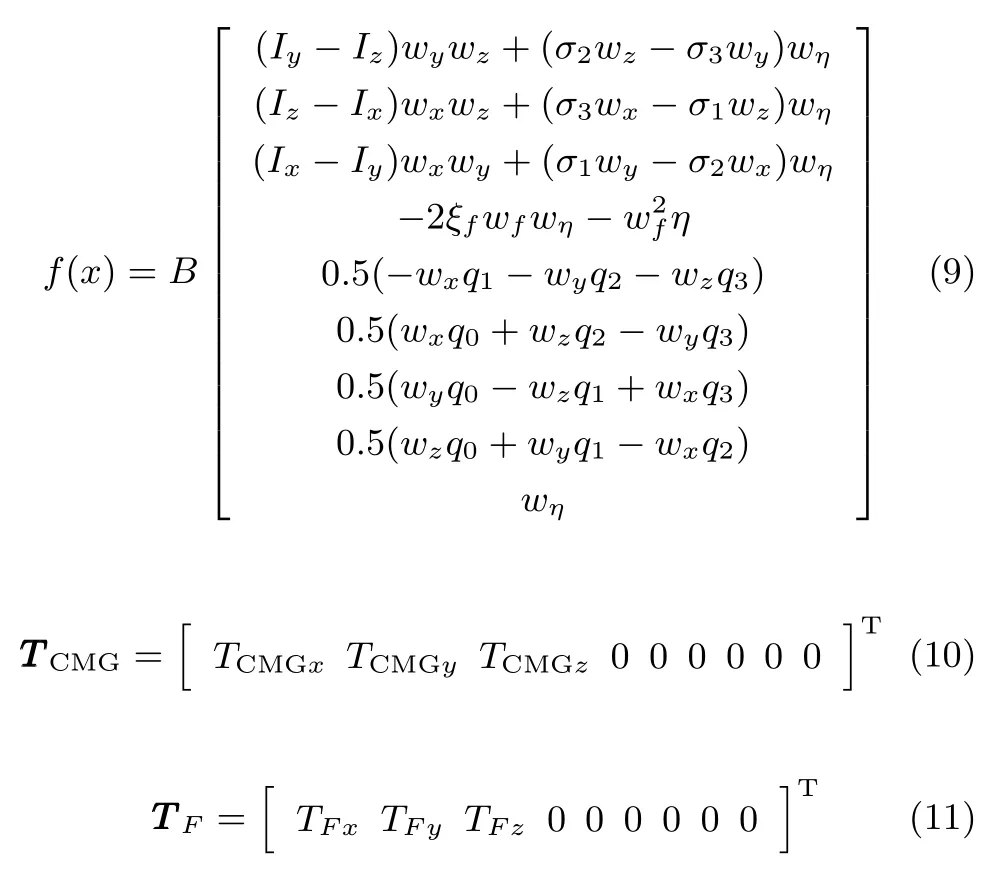
在本文中,假设系统的状态均是可观测的,定义系统的输出为yc=x.进而有式(12):

3.2 金字塔构型CMG群动力学建模
金字塔构型单框架CMG群系统的坐标系示意图如图5所示.考虑到4个CMG单元对称分布,各框架轴在卫星本体坐标系中可表示为下式:
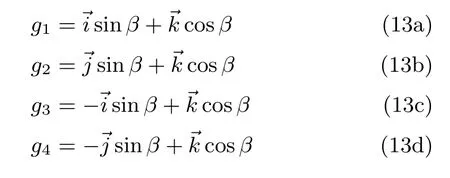
式(13)中,g1,g2,g3,g4分别为相应的框架轴,β为安装倾角,(→i,→j,→k) 为沿星体坐标系三轴的基矢量.
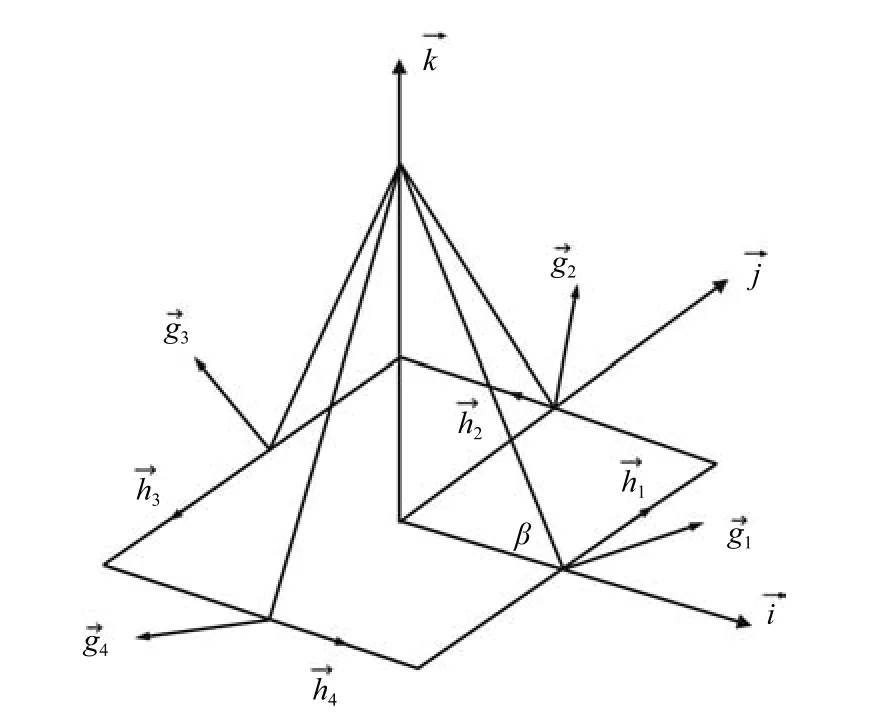
图5 金字塔构型CMG群系统坐标系示意图Fig.5 Diagram of coordinate system for pyramid con fi guration CMG groups
金字塔构型CMG群系统的角动量H可表示为式(14):

式中,h1,h2,h3,h4分别为4个CMG单元的输出角动量,在卫星本体坐标系中有:
式(15)中,δ1,δ2,δ3,δ4分别为4个CMG 的框架角.假设4个CMG转子的角动量均相同,不失一般性,取角动量的值均为1.
通过对CMG群系统输出的角动量H进行微分,可得到式(16):

式中,J为雅克比矩阵,形式为
式(17)中,J1,J2,J3,J4分别表示4个CMG单元输出的力矩矢量.
金字塔构型CMG群系统的输出力矩可描述为式(18):

综上,结合式(12)和式(18),具有联合执行机构的挠性敏捷卫星姿态动力学及运动学方程可视为以[w wηq η δ]T为状态变量,以CMG群系统框架轴角速度和反作用飞轮力矩为控制输入的被控系统,其具有复杂的非线性特性.以此为基础,也可以实现对卫星姿态及挠性附件振动特性的预估.
4 基于Legendre伪谱法的卫星姿态最优轨迹规划
第3节中建立的控制数学模型具有较强的非线性,且在实际姿控任务中存在多种约束,如CMG群框架轴角度及角速度、机动性能及成像任务等约束,传统的基于极小值原理的方法很难得到敏捷卫星运动的最优轨迹,数值解的求取方法成为目前研究的主要方向.在本节的研究中,将以第3节建立的挠性卫星姿态动力学及运动学为依据,以伪谱法为手段设计整星控制模型的最优姿态机动路径及相应的CMG群框架轴角速度最优轨迹,以此作为真实挠性敏捷卫星的“最优”姿态机动或跟踪路径.
相比于CMG群,飞轮控制力矩的主要作用是修正与最优路径间的偏差,其控制力矩相对较小,因此在本节的规划中不考虑飞轮的控制作用.用到的挠性卫星姿态动力学及运动学的连续时间方程为式(19):

4.1 优化指标建立及约束分析
对于挠性敏捷卫星的多目标成像姿态机动控制任务,一方面追求卫星姿态机动的快速性及能量最优,一方面要抑制卫星姿态机动引起的挠性附件振动以实现卫星姿态机动后的快速稳定,因此优化指标通常建立为三个性能的加权组合.而对于凝视或非沿轨曲线等成像模式的姿态跟踪控制任务,由于成像过程中某些时刻的姿态是预先规划固定的,因此其优化指标考虑为能量最优及挠性附件振动抑制性能的组合.
各性能指标定义如下:
1)多目标成像姿态机动控制任务:

2)灵巧成像模式姿态跟踪控制任务:

其中,t0和tf分别表示卫星姿态机动的开始和结束时间.u(t)=˙δ表示CMG群的框架轴角速度.性能指标式(20)中的第一项表示挠性附件振动抑制性能,第二项表示姿态机动能量性能,第三项表示姿态机动时间性能.
在挠性敏捷卫星姿态机动或姿态跟踪过程中,为了保证姿态的平稳性或受限于姿态敏感器的动态特性,通常对姿态机动角速度或执行机构的控制力矩进行限幅约束,即有:
为了保证金字塔构型CMG群远离其奇异性,引入奇异量度的概念,如式(23)所示,将奇异状态以一定的数值加以度量,即:

D的值越趋近于零,表明系统离奇异面越近;D值越大,系统越远离奇异面.在本文中,将限制奇异度量值D的幅值,以此约束CMG群的奇异性.
此外,对于挠性敏捷卫星的姿态机动控制任务,其初始和终端时刻的姿态及角速度是受等式约束的,即初始t0时刻的姿态四元数及角速度为


终端tf时刻对应的姿态四元数及角速度约束为而对于挠性敏捷卫星的姿态跟踪控制任务,除初始和终端时刻的姿态及角速度受约束外,在成像过程中的某些时刻对应姿态及角速度也是受等式约束的(预先规划固定的),即有:
此外,在不同姿态机动或跟踪任务的初始时刻,金字塔构型CMG群的框架轴角度初值可能会不同,因此在规划时还需要考虑框架角的初值约束:

综上,针对新颖灵巧成像模式的挠性敏捷卫星姿态控制优化问题的一般性描述如下所示:

且满足非线性模型、初始状态、过程中状态及终端状态的等式或不等式约束条件:
其中,g(·)表示待优化性能指标中的非线性函数,φ(·)表示系统状态的各种等式约束函数,C(·)表示系统状态和控制量等的不等式约束函数.
通过以上建立的优化问题可以看出,其是一类具有非线性微分方程约束、代数等式和不等式约束,优化指标为非线性积分项的连续时间优化问题.考虑到该优化问题是包含初始和终端时刻的,本节将以配点法中的Legendre伪谱法为主要手段进行CMG群前馈控制力矩的最优规划.
Legendre伪谱法的主要思想是采用拉格朗日全局插值多项式,在一系列离散的时间节点上近似状态变量和控制变量,并通过插值多项式的导数来逼近挠性卫星姿态动力学及运动学方程中状态变量对时间的导数,且在选取的配点上严格满足方程的右函数约束.因此,下面分别从5个方面对连续时间优化问题进行离散化近似求解.
4.2 状态量和控制量的逼近
Legendre伪谱法采用全局插值多项式在区间τ∈[−1,1]内逼近所需的状态变量,以Lagrange插值多项式作为基函数,利用时间区间τ∈[−1,1]的M个点τ1,τ2,···,τM定义这些多项式.因此,最优控制问题中的状态量及控制量等均可以被近似为式(29)和式(30):
式中,Li(τ)(i=1,2,···,M):为 Largrange 插值多项式;Y(τ)为真实值y(τ)的(M−1)阶近似,由于其在插值点上等于真实值,因此有:
4.3 全局插值点的选取
在上述全局插值逼近状态变量及控制量的过程中,需要选取区间τ∈[−1,1]内的M个点τ1,τ2,···,τM以进行离散化.考虑到灵巧成像模式对敏捷卫星初始姿态及终端姿态的约束需求,本文采用非等间距的LGL(Legendre Gaus Lobatto)点作为离散化点.因为在这种方法中,积分节点包含了两个边界点.虽然该方法减少了两个自由度,但仍可以精确逼近小于等于2M−3次的多项式.
M个LGL点可以由的零点来确定,其中为(M−1)阶Legendre多项式的导数.PM(τ)定义为式(31):

4.4 时间变量的映射
由于离散点τ1,τ2,···,τM在区间τ∈[−1,1]内,但通常敏捷卫星姿态控制任务规划时间区间[t0,tf]并不只限于[−1,1]区间,因此需将时间量映射到区间[t0,tf].映射关系定义为式(32):
式中,t0,tf表示规划起始和终端时刻.
通过该变换,可以将卫星姿态控制规划时间区间[t0,tf]映射到区间[−1,1],进而在[−1,1]内考虑优化问题的求解.
4.5 数值积分的逼近
在选择用于逼近状态量和控制量等的插值点之后,Legendre伪光谱算法还需要使用另一组插值点精确地逼近最优问题的动力学、最优性能指标以及各项包含微积分的非线性约束部分.积分逼近的一般形式定义为式(33):


4.6 状态微分的逼近
利用伪光谱算法对约束条件离散化时,需将动力学微分方程等条件转换为代数条件.伪光谱算法应用正交分配方法,在正交多项式(例如Legendre多项式)的零点将状态逼近值的导数进行分配,即令离散后系统在这些点上的导数逼近实际的导数.
由于Legendre伪光谱算法采用LGL点,插值逼近所用的离散点和正交分配所用的点是相同的,因此微分方程离散化的表达式定义为式(34):
微分矩阵D∈RK×K定义为
进而,连续时间微分方程通过正交配置可以转换成如下K个代数方程:

通过以上处理,在最优化问题的离散求解中,可以用一组在配置点上的代数条件来代替敏捷卫星姿态动力学、运动学及挠性附件动力学等各微分方程.
综上,通过本节的设计,可将原来建立的敏捷卫星姿态控制连续非线性最优问题转化为离散非线性动态规划问题,通过对该规划问题的求解可实现挠性敏捷卫星姿态机动或跟踪控制的CMG群框架角速度、卫星姿态角和角速度的最优规划.
5 卫星姿态最优轨迹的非线性滚动跟踪算法设计
由于建模过程中难免存在如转动惯量测量不准确、空间干扰难以精确估计等因素,将导致在规划得到的CMG群框架角速度作用下的挠性敏捷卫星的真实姿态及角速度与规划值存在一定的偏差.为消除该偏差,本节将设计反作用飞轮的非线性模型预测控制律,以此实现对规划最优卫星姿态角及角速度的快速精确跟踪.
5.1 卫星姿态跟踪优化指标的建立
通过对连续时间方程式(12)进行离散化,可获得挠性卫星姿态的离散时间方程,如式(36):

反作用飞轮参与控制的目的是实现对规划姿态轨迹的高精度跟踪控制.在本节研究中,将卫星姿态角及角速度等的跟踪误差、飞轮控制力矩能量和终端偏差的加权组合作为待优化指标,定义为式(37):
式中,e(k+n)表示对最优轨迹等的跟踪误差,u(k+m)表示待设计的飞轮控制力矩,分别为跟踪误差、控制量和终端加权矩阵,Np为预测时域.
待优化指标中不同性能的加权矩阵体现了对指标的倾向性.在本文研究中,对规划最优姿态轨迹的快速跟踪是首要目标,因此本文中跟踪误差的加权矩阵取值较力矩能量的加权矩阵取值相对要大.预测时域的选取主要考虑建立的预测模型的精确性及硬件资源和计算能力.在预测模型精度较高、硬件能力较强情况下,可以适当延长预测时域以增强预测能力,有利于提高系统动态响应速度和稳态精度.
注1.姿态跟踪的优化指标建立可以有多种形式,其目的均是为求解待定的独立优化变量u(k+m).在本文提出的控制方案中,反作用飞轮的作用主要是在其力矩能力范围内实现对规划最优姿态轨迹的高精度跟踪.因此,跟踪的快速性与消耗的能量是本文关注的指标.其他优化性能也可以加入到待优化指标中,如力矩增量性能等.对于具有不同形式的优化指标,本文提出的基于NMPC的敏捷卫星姿态控制方法是相同的.
5.2 卫星姿态的预测
根据测量或估计获得的k时刻卫星姿态信息x(k),基于规划获得的最优CMG群框架轴角速度轨迹,利用离散化的挠性卫星姿态动力学及运动学方程,通过迭代计算,可求取未来Np预测步内的卫星姿态信息,即有:
其中,预测时域内的CMG群控制力矩由规划CMG群框架轴角速度在相应时刻的规划值折算而来.
从以上Np步预测时域内的系统状态可知,预测后的待设计自由变量为Np时域步内的飞轮控制量,即反作用飞轮的待设计控制力矩
u(k+m).当预测时域Np超出控制时域Nu时,假设飞轮控制力矩在区间[Nu,Np]上保持不变,即有式(38)成立:

5.3 反作用飞轮跟踪控制律的实现
综上,在规划获得卫星最优姿态信息情况下,敏捷卫星姿态跟踪控制的优化问题如下:

且满足由执行机构的能力带来的时域约束条件:
其中,TFmin和TFmax表示飞轮力矩的下界与上界,∆TFmin和∆TFmax表示飞轮力矩增量的下界与上界.
目标函数J(x(k),整理为
式中,‖·‖2表示2-范数,表示预测的卫星姿态输出,r(k+n)为期望的卫星状态,其由第4节的最优规划算法获得.为系统的预测控制输入,即待优化的飞轮控制力矩.
定义式(42):


假设姿态跟踪约束优化的最优解为式(44):

根据预测控制原理,最优解的第一个元素,即当前时刻的飞轮最优控制力矩将作用于卫星姿态控制系统.定义当前时刻的飞轮最优控制量为

在下一采样时刻,根据更新的姿态信息,重复以上优化过程,实现敏捷卫星姿态跟踪的滚动时域控制.
注2.本文为了追求更高的控制性能,以离线最优轨迹规划及在线滚动跟踪方式实现高性能控制,相比于连续控制律设计,本文提出的离散控制策略面临计算量大及计算速度慢等问题.提升计算速度的主要手段是设计高效的优化问题求解算法及充分发挥硬件资源的计算特性.一种可行的硬件实现方案是基于FPGA(Field programmable gate array)和可编程系统(System-on-a-programmable-chip,SoPC)的NMPC(Nonlinear model predictive control)控制器的实现.设计高效的基于惩罚函数的粒子群优化算法及发挥FPGA的硬件并行计算能力是提高计算速度的可行途径.本文在此仅作理论方法的研究,为应用奠定理论基础.
注3.在本文控制方法设计中,并没有针对干扰或惯量参数不确定性等去设计鲁棒控制器,而是在金字塔构型CMG群提供快速姿态机动或跟踪的大控制力矩基础上,利用反作用飞轮修正卫星真实姿态与期望姿态间的偏差等,进而抑制各种不确定性的影响.在仿真研究部分中,将通过控制器中参数、空间干扰及转动惯量存在偏差等方式来说明本文提出控制方法的鲁棒性及适应性.
6 仿真研究及分析
以某型挠性敏捷卫星为例,假设其测量的转动惯量矩阵如式(46)所示:
轨道选取为高度660km的太阳同步圆轨道,空间干扰力矩取为
其中,频率ω0取值为0.0011,设定金字塔构型CMG群转子角动量为5Nms,挠性附件的一阶振动频率为2.23Hz,阻尼为0.032,刚柔耦合矩阵系数为[0.00041,3.833,0].在轨迹规划算法及跟踪控制器设计中的卫星转动惯量设置为diag{104 106 147}kg·m2.
以下仿真基于MATLAB R2012b软件进行,规划及跟踪仿真运行在CPU为i7处理器、主频3.40GHz、4GB内存的PC机上.预测控制步数取为30步,仿真步长设置为0.1s.
6.1 敏捷卫星姿态大角度快速机动仿真
本算例以挠性敏捷卫星姿态进行滚动轴40°、俯仰轴25°机动(相对惯性系)为例进行仿真.在卫星姿态机动过程中,机动角速度约束为[−6°/s,6°/s],CMG群框架角速度约束为[−3rad/s,3rad/s],飞轮力矩输出约束为[−0.04Nm,0.04Nm],考虑的CMG群奇异性约束为D>0.5.卫星姿态初始机动姿态角为[0°,0°,0°],机动初始角速度为[0°/s,0°/s,0°/s],终端姿态角为 [40°,25°,0°],终端角速度为 [0°/s,0°/s,0°/s].选取10个Legendre全局插值点,整个最优机动规划算法耗时为17.4s.
1)测量惯量与真实惯量匹配时仿真
规划获得的卫星姿态角、角速度曲线与实际跟踪控制姿态角、角速度曲线,以及规划的CMG群框架角、角速度曲线和飞轮实际控制力矩曲线如图6和图7所示.
仿真结果表明:
a)仿真时间进行到10s时,实际姿态角与规划姿态角的偏差小于0.05°,实际姿态角速度与规划姿态角速度的偏差小于0.02°/s;仿真时间15s时,敏捷卫星实现滚动轴40°、俯仰轴25°的机动控制任务.姿态控制精度优于0.02°,姿态稳定度优于0.01°/s;仿真时间26s时,姿态稳定度优于0.002°/s;
b)机动过程中的姿态角速度、CMG群的框架轴角速度及飞轮控制力矩等变化均满足约束要求;
c)导致实际曲线与规划曲线有较小偏差的原因可归结为:i)在规划和跟踪算法设计时,为简化在线计算量,没有考虑转动惯量中的耦合项等,导致与真实卫星动态间存在一定偏差;ii)空间干扰力矩的存在对敏捷卫星姿态角及姿态角速度准确跟踪带来一定的影响;
d)从飞轮控制力矩曲线可以看出,由于在预测过程中考虑了对当前时刻以后30个规划点的快速跟踪性能,设计的NMPC控制算法能够充分利用飞轮的控制力矩,在较短时间内使飞轮以最大控制力矩输出,保证对规划姿态的快速跟踪.
2)测量惯量与真实惯量存在5%偏差时仿真
在本节的研究中,将考虑真实卫星转动惯量比测量值偏大5%时的控制效果.仿真曲线如图8和图9所示.
仿真结果表明:
a)仿真时间进行到24.5s时,实际姿态角与规划姿态角的偏差小于0.05°,实际姿态角速度与规划姿态角速度的偏差小于0.02°/s;仿真时间27.5s时,卫星实现滚动轴40°、俯仰轴25°的机动控制,控制精度优于0.02°,姿态稳定度优于0.01°/s;仿真时间36s时,姿态稳定度优于0.002°/s;
b)在真实转动惯量偏大5%误差情况下,设计的反作用飞轮的NMPC控制律能够充分发挥飞轮力矩性能,使敏捷卫星姿态及姿态角速度快速跟踪上规划曲线.
6.2 敏捷卫星凝视成像姿态高精度控制仿真
本算例以挠性敏捷卫星进行地面某目标点凝视成像为例进行仿真.在卫星姿态最优规划过程中,考虑的奇异性约束为D>1.2.同样选取10个Legendre全局插值点,整个最优姿态控制规划算法耗时为20.3s.在凝视成像过程中,考虑的10个时间点的姿态角及角速度约束(相对惯性系)见表1.
1)测量惯量与真实惯量匹配时仿真
规划获得的卫星凝视姿态曲线与实际跟踪控制姿态曲线,以及规划的CMG群框架角、角速度曲线和飞轮实际控制力矩曲线如图10和图11所示.仿真结果表明:
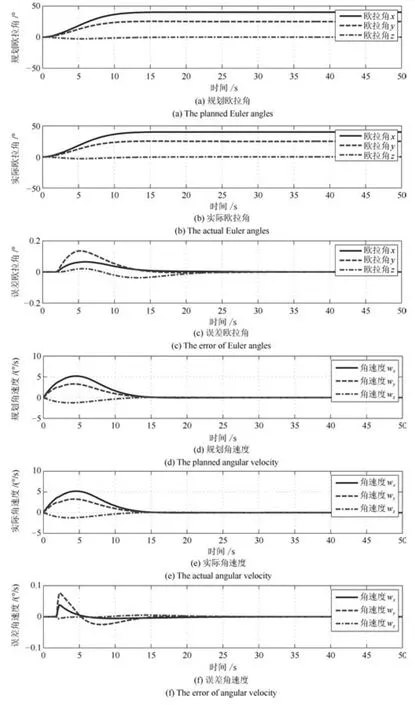
图6 惯量匹配情况下的姿态大角度机动规划轨迹与实际轨迹曲线对比Fig.6 Comparison of planed trajectory and actual trajectory for attitude maneuver in the case of inertia matching
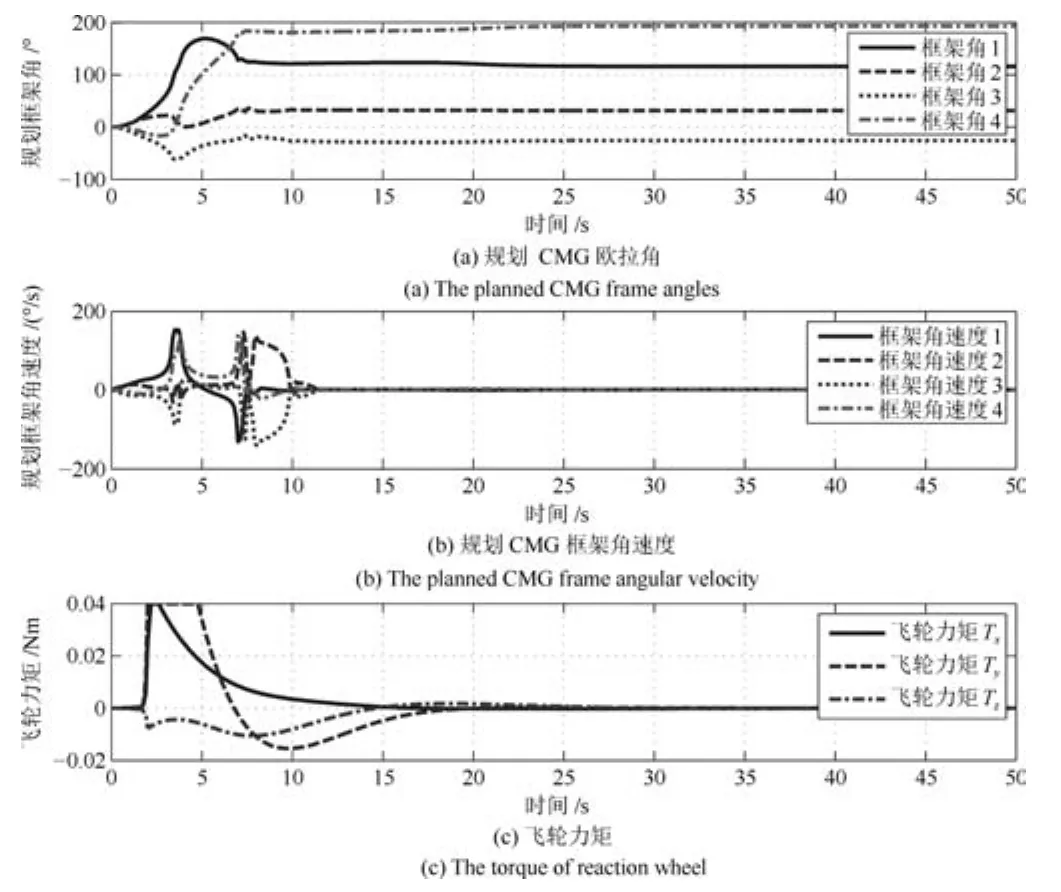
图7 惯量匹配情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线Fig.7 Planed CMG frame angle,angular velocity and actual fl ywheel control torque curves in the case of inertia matching
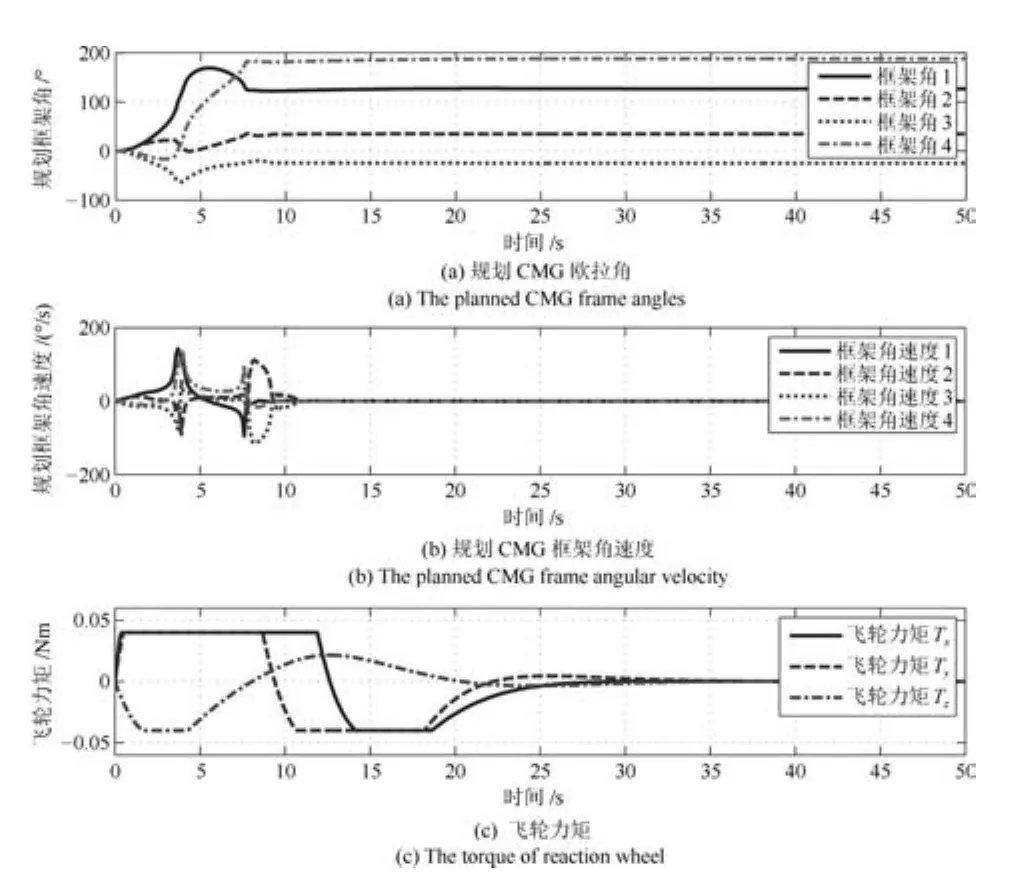
图9 惯量5%偏差情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线Fig.9 Planed CMG frame angle,angular velocity and actual lf ywheel control torque curves with inertia 5%deviation
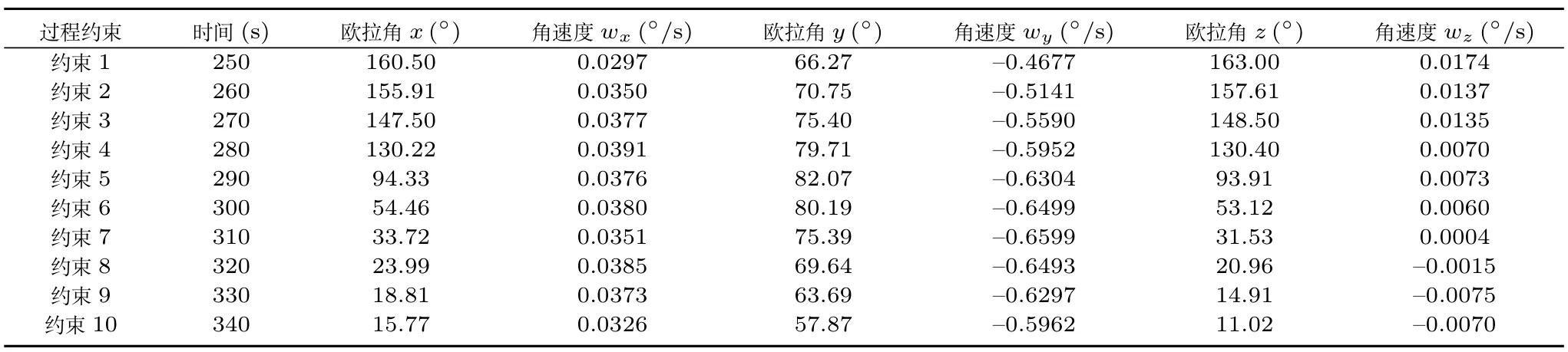
表1 凝视成像过程中的姿态角及角速度约束Table 1 Attitude angle and angular velocity constraints in staring imaging
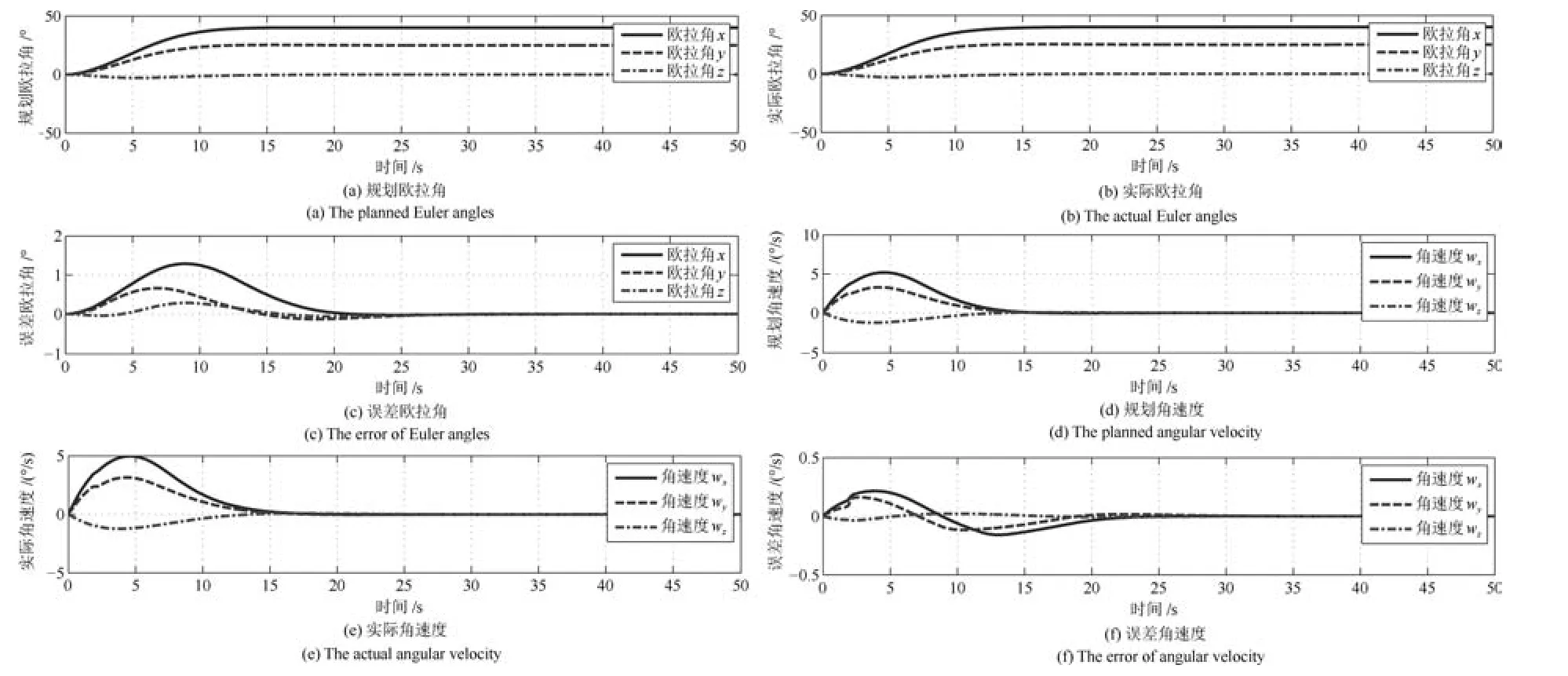
图8 惯量5%偏差情况下的姿态大角度机动规划轨迹与实际轨迹曲线对比Fig.8 Comparison of planed trajectory and actual trajectory for attitude maneuver with inertia 5%deviation
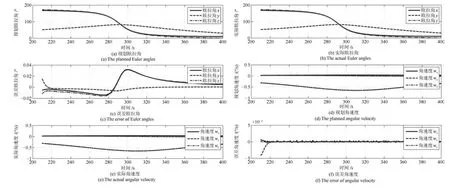
图10 惯量匹配情况下的凝视成像姿态规划轨迹与实际轨迹曲线对比Fig.10 Comparison of planed trajectory and actual trajectory for staring imaging in the case of inertia matching
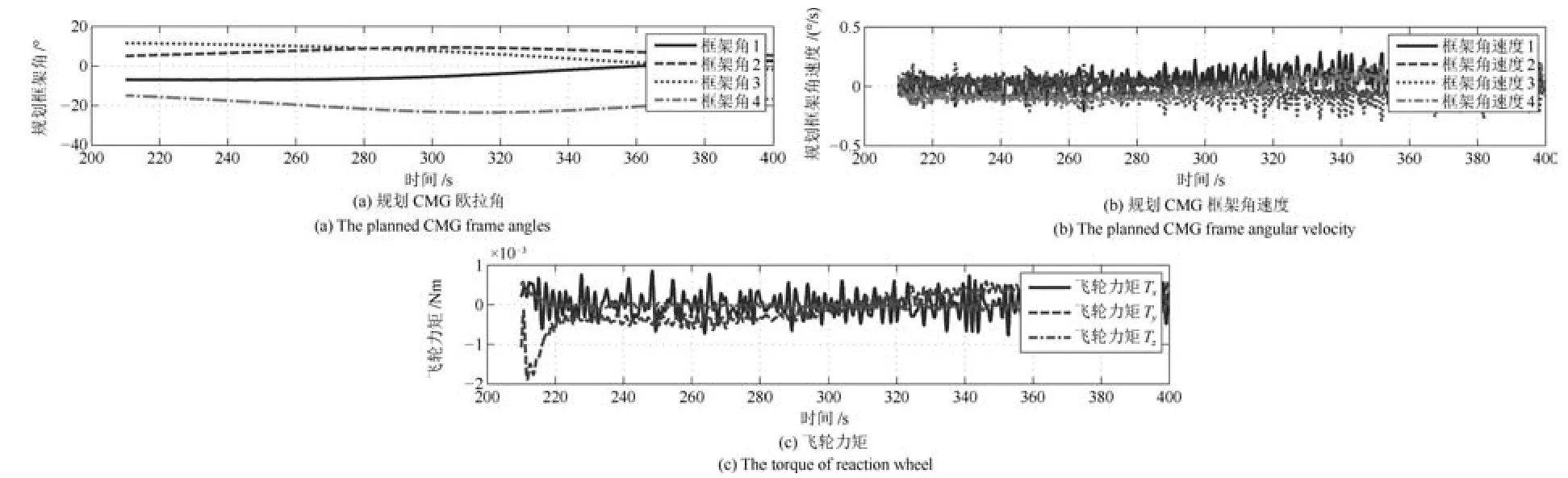
图11 惯量匹配情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线Fig.11 Planed CMG frame angle,angular velocity and actual fl ywheel control torque curves in the case of inertia matching
a)仿真时间250s时,实际姿态角与规划姿态角偏差最大值小于0.012°,实际姿态角速度与规划姿态角速度偏差最大值小于0.0003°/s;在整个成像过程中(仿真时间250~350s),三轴姿态角跟踪误差最大值约为0.032°,三轴姿态角速度跟踪误差最大值约为0.0005°/s.三轴飞轮输出控制力矩最大值约为0.001Nm;凝视成像过程中的最大姿态角跟踪误差折算到地面的指向偏差小于369m;
b)在凝视成像过程中,姿态角速度、CMG群的框架轴角速度、飞轮力矩约束等均满足限幅要求.
2)测量惯量与真实惯量存在10%偏差时仿真
在考虑真实卫星转动惯量比测量值偏大10%情况下,仿真曲线如图12和图13所示.仿真结果表明:
a)仿真时间250s时,实际姿态角与规划姿态角偏差最大值小于0.015°,实际姿态角速度与规划姿态角速度偏差最大值小于0.0005°/s;在整个成像过程中,三轴姿态角跟踪误差最大值约为0.055°,三轴姿态角速度跟踪误差最大值约为0.0008°/s,三轴飞轮输出力矩最大值约为0.002Nm;
b)存在惯量偏差情况下,设计的飞轮NMPC控制律能够快速调整其输出力矩,保证卫星姿态角及姿态角速度快速跟踪上规划的姿态曲线,折算到地面的指向偏差小于634m.
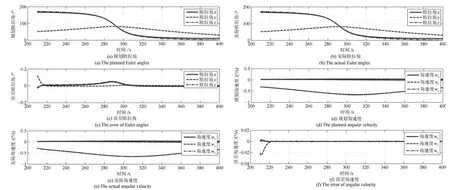
图12 惯量10%偏差情况下的凝视成像姿态规划轨迹与实际轨迹曲线对比Fig.12 Comparison of planed trajectory and actual trajectory for staring imaging with inertia 10%deviation
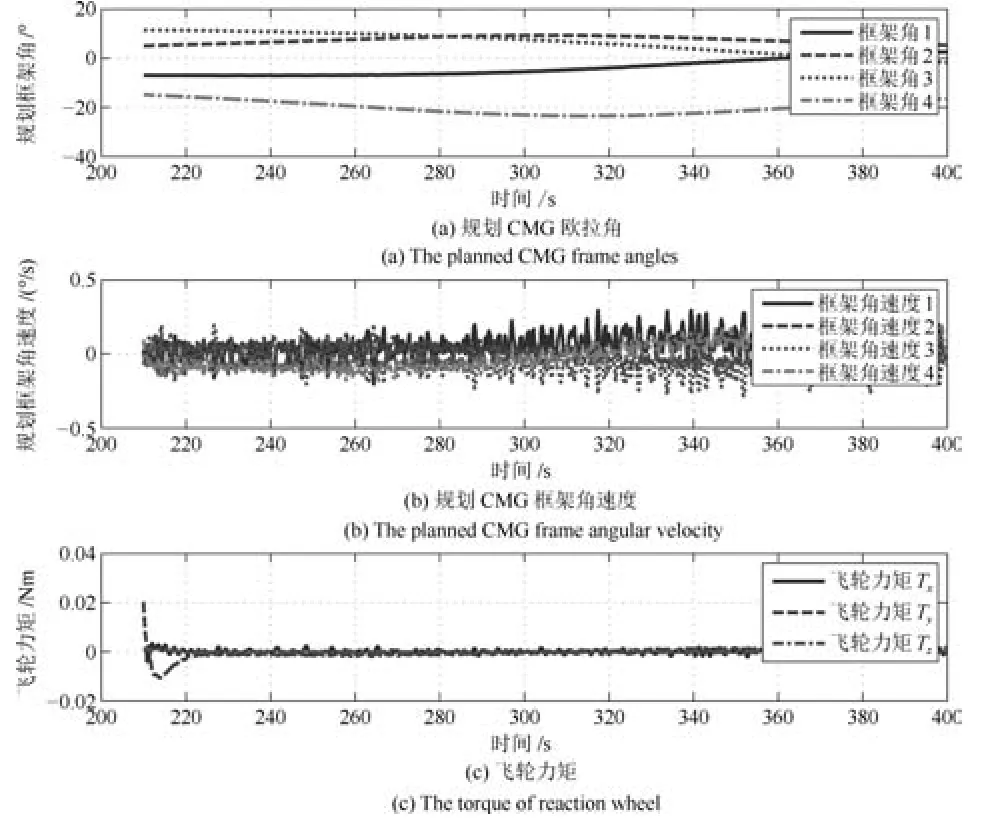
图13 惯量10%偏差情况下的规划CMG框架角、角速度与实际飞轮控制力矩曲线Fig.13 Planed CMG frame angle,angular velocity and actual fl ywheel control torque curves with inertia 10%deviation
7 结论
本文针对以CMG和飞轮为联合执行机构的挠性敏捷卫星,提出一种融合卫星姿态最优轨迹规划与高精度跟踪的控制方法.建立了面向卫星姿态最优轨迹规划及预测未来姿态信息的非线性状态空间方程,在给出综合评价指标及约束基础上,基于Legendre伪光谱方法实现对原连续优化问题的离散化,进而规划出卫星姿态及CMG群框架角速度的最优轨迹;以规划的最优姿态轨迹为跟踪目标,设计了飞轮的非线性模型预测跟踪控制律,以消除由于建模误差及干扰等带来的姿态偏差.本文通过结合Legendre伪谱法及非线性模型预测控制,提出的控制方法在一定程度上解决了敏捷卫星姿态机动快速性、准确性问题,能够满足灵巧多模式成像对挠性敏捷卫星姿态快速机动及高精度跟踪的控制需求.
1 Tao J W,Yu W X.A preliminary study on imaging time difference among bands of WorldView-2 and its potential applications.In:Proceeding of the 2011 IEEE International Geoscience and Remote Sensing Symposium.Vancouver,Canada:IEEE,2011.198−200
2 Leeghim H,Lee I H,Lee D H,Bang H,Park J O.Singularity avoidance of control moment gyros by predicted singularity robustness:ground experiment.IEEE Transactions on Control Systems Technology,2009,17(4):884−891
3 Li Chuan-Jiang,Guo Yan-Ning,Ma Guang-Fu.Singularity analysis and steering law design for single-gimbal control moment gyroscopes.Journal of Astronautics,2010,31(10):2346−2453(李传江,郭延宁,马广富.单框架控制力矩陀螺的奇异分析及操纵律设计.宇航学报,2010,31(10):2346−2453)
4 Sun Zhi-Yuan,Jin-Guang,Xu Kai,Zhang Liu,Yang Xiu-Bin.Steering law design for SGCMG based on optimal output torque capability.Chinese Journal of Space Science,2012,32(1):113−122(孙志远,金光,徐开,张刘,杨秀彬.基于力矩输出能力最优的SGCMG 操纵律设计.空间科学学报,2012,32(1):113−122)
5 Huntington G T.Advancement and analysis of a gauss pseudospectral transcription for optimal control[Ph.D.dissertation],Massachusetts Institute of Technology,USA,2007.
6 Yang Xi-Xiang,Zhang Wei-Hua.Rapid optimization of ascent trajectory for solid launch vehicles based on Gauss pseudospectral method.Journal of Astronautics,2011,32(1):15−21(杨希祥,张为华.基于Gauss伪谱法的固体运载火箭上升段轨迹快速优化研究.宇航学报,2011,32(1):15−21)
7 Sun C C,Wu S M,Chung H Y,Chang W J.Design of takagi-sugeno fuzzy region controller based on rule reduction,robust control,and switching concept.Journal of Dynamic Systems,Measurement,and Control,2007,129(2):163−170
8 Huang Jing,Li Chuan-Jiang,Ma Guang-Fu,Liu Gang.Generalised inversion based maneuver attitude control for underactuated spacecraft.Acta Automatica Sinica,2013,39(3):285−292(黄静,李传江,马广富,刘刚.基于广义逆的欠驱动航天器姿态机动控制.自动化学报,2013,39(3):285−292)
9 Chen Gang,Kang Xing-Wu,Qiao Yang,Chen Shi-Lu.The nonlinear controller designing for spacecraft large angle attitude state tracking.Journal of Astronautics,2009,32(2):556−559(陈刚,康兴无,乔洋,陈士橹.航天器相对大角度姿态跟踪非线性控制器设计.宇航学报,2009,32(2):556−559)
10 Dong C Y,Xu L J,Chen Y,Wang Q.Networked fl exible spacecraft attitude maneuver based on adaptive fuzzy sliding mode control.Acta Astronautica,2009,65(11−12):1561−1570
11 Hu Q L,Cao J,Zhang Y Z.Robust backstepping sliding mode attitude tracking and vibration damping of fl exible spacecraft with actuator dynamics.Journal of Aerospace Engineering,2009,22(2):139−152
12 Yu S Y,Reble M,Chen H,Allg¨ower F.Inherent robustness properties of quasi-in fi nite horizon nonlinear model predictive control.Automatica,2014,50(9):2269−2280
13 Chang Lin,Jin Guang,Fan Guo-Wei,Xu Kai.Small satellite maneuver based on terminal sliding mode control.Optics and Precision Engineering,2015,23(2):485−496(常琳,金光,范国伟,徐开.基于terminal滑模控制的小卫星机动方法.光学精密工程,2015,23(2):485−496)
14 Bernardini D,Bemporad A.Stabilizing model predictive control of stochastic constrained linear systems.IEEE Transactions on Automatic Control,2012,57(6):1468−1480
15 Cannon M,Kouvaritakis B,Wu X J.Model predictive control for systems with stochastic multiplicative uncertainty and probabilistic constraints.Automatica,2009,45(1):167−172
16 Fan Guo-Wei,Chang Lin,Dai Lu,Xu Kai,Yang Xiu-Bin.Nonlinear model predictive control of agile satellite attitude maneuver.Optics and Precision Engineering,2015,23(8):2318−2327(范国伟,常琳,戴路,徐开,杨秀彬.敏捷卫星姿态机动的非线性模型预测控制.光学精密工程,2015,23(8):2318−2327)
17 Sun Guang,Huo Wei.Direct-adaptive fuzzy predictive control of satellite attitude.Acta Automatica Sinica,2010,36(8):1151−1159(孙光,霍伟.卫星姿态直接自适应模糊预测控制.自动化学报,2010,36(8):1151−1159)
猜你喜欢
杂志排行
自动化学报的其它文章
- Robust H∞Consensus Control for High-order Discrete-time Multi-agent Systems With Parameter Uncertainties and External Disturbances
- Convolutional Sparse Coding in Gradient Domain for MRI Reconstruction
- Interactive Multi-label Image Segmentation With Multi-layer Tumors Automata
- Bayesian Saliency Detection for RGB-D Images
- 视频中旋转与尺度不变的人体分割方法
- 双时间尺度下的设备随机退化建模与剩余寿命预测方法